2. Электропривод по п. 1, о т л н- чающийся тем, что, с целью повышения точности стабилизации частоты и фазы вращения при внешних воздействиях сложной формы, для которых первые m производных отличны от нуля, между выходом второго фазового дискриминатора и входом усилителя мощности введены m последовательно включенных групп из последовательно соединенных дополнительных дискретного преобразователя длительность широтно-импульсного сигнала - частота и фазового дискриминатора, другой вход которог подключен к формирователю импульсов, а другой вход каждого из m дискретных преобразователей длительность широтно-импульсного сигнала - частота подключен к выходу предыдуо1его дискретного преобразователя длительность широтно-импульсного сигнала частота.
| название | год | авторы | номер документа |
|---|---|---|---|
| Электропривод | 1988 |
|
SU1656652A1 |
| ЭЛЕКТРОПРИВОД | 1997 |
|
RU2130688C1 |
| ЭЛЕКТРОПРИВОД ПОСТОЯННОГО ТОКА | 1996 |
|
RU2138903C1 |
| Электропривод | 1987 |
|
SU1434532A1 |
| Дискретный пропорционально-интегральный регулятор скорости вращения | 1988 |
|
SU1522176A1 |
| СИНХРОННО-СИНФАЗНЫЙ ЭЛЕКТРОПРИВОД | 2010 |
|
RU2422978C1 |
| СТАБИЛИЗИРОВАННЫЙ ЭЛЕКТРОПРИВОД | 2011 |
|
RU2467465C1 |
| СТАБИЛИЗИРОВАННЫЙ ЭЛЕКТРОПРИВОД | 2011 |
|
RU2462809C1 |
| Электропривод постоянного тока | 1987 |
|
SU1515311A1 |
| Способ фазового управления асинхронным электродвигателем и устройство для его осуществления | 1978 |
|
SU928582A1 |
1. ЭЛЕКТРОПРИВОД, содержащий электродвигатель постоянного тока, снабженный датчиком частоты вращения с формирователем импульсов и подключенный к усилителю мощности, входом связанному с выходом фазового дискриминатора, вход которого подключен к блоку разделения импульсов, первый вход.которого связан с выходом формирователя импульсов, а второй вход подключен к выходу блока задания частоты, отличающий-с я тем, что, с целью повыщения точности стабилизации частоты вращения двигателя при линейно изменяющихся внешних воздействиях, в него введены последовательно соединенные дискретный преобразователь длитейьность щиротно-импульсного сигнала частота и второй фазовый дискриминатор, выход которого связан с входом усилителя мощности, второй вход - с выходом формирователя импульсов, а первьй и второй входы дискретного преобразователя длительность широтно-импульсного сигнала-частота подключены соответственно к выходу первого фазового дискриминатора и выходу блока задания частоты.
Изобретение -относится к электротехнике, а именно к области управляемых :-лектроприводов, предназначенных для точного регулирования и стабилизации частоты браш1ения, работающих в условиях изменяющихся внешних воздействий.
Известен электропривод, содержащий электродвигатель постоянного тока, генератор эталонной частоты, фазовый дискриминатор, датчик частоты вращения двигателя и преобразователь подключенный к якорю электродвигателя, а также полупроводниковый ключ, зарядный конденсатор, корректирующий блок, ручной регулятор и два диода. Такая система является астатической по скорости l .
Недостатком этого электропривода является возникновение ошибки стабилизации частоты вращения при наличии изменяющихся во времени внешних воздействий (напряжения источника питания, момента нагрузки и других), а также изменения параметров двигателя и системы управления. Величина этой ошибки зависит от характера внешнего воздействия, места его приложения и характеристик электропривода .
Наиболее близким к изобретению по технической сущности является электропривод, содержащий электродвигатель постоянного тока,снабженный датчиком частоты вращения с формирователем импульсов и подключенный к усилителю мощности, входом связанному с выходом фазового дискриминатора, вход которого подключен к блоку разделения импульсов, первый вход ко
торого связан с выходом формирователя импульсов, а второй вход подключен к выходу блока задания частоты 2.
В известных электроприводах (замкнутых по углу) при непрерывном росте нагрузки необходимое увеличение напряжения на дви1ателе возможно лишь за счет такого же роста скважности подаваемых с усилителя мощности на двигатель импульсов напряжения, т.е. непрерывного увеличения фазового рассогласования заданной и действительной частот вращения за счет непрерывного отставания вала двигателя от вращающегося с заданной скоростью эталонного вала. Такое непрерывное отставание по углу вала двигателя есть, очевидно, уменьшение его частоты вращения и появление ошибки в стабилизации заданного значения частоты.
Таким образом, наличие установившейся ошибки стабилизации частоты вращения при изменении момента нагрузки по линейному закону вызвано принципом действия описанного электропривода. Ошибка возникает и при линейном изменении (дрейфе) параметров электропривода.
Целью изобретения является повышение точности стабилизации частоты вращения двигателя при работе в условиях линейно измeняюш ixcя внешних воздействий, а также при внешних возействиях сложной формы, для которых первые m производных отличны от нуля.
Поставленная цель достигается тем, что в электпропривод, содержащий электродвигатель постоянного тока, снабженный датчиком частоты вращения
с формирователем импульсов и подключенный к усилителю мощности, входом связанному с выходом фазового дискриминатора , вход которого подключен к блоку разделения импульсов, первый вход которого связан с выходом формирователя импульсов, а второй вход подключен к выходу блока задания частоты, введены последовательно соединенные дискретный преобразователь длительность широтно-импульсного сигнала - частота и второй фазовый дискриминатор, выход которого связан с входом усилителя мощности, второй вход - с выходом формирователя импульсов, а первый и второй .входы дискретного преобразователя длительность широтно-импульсного сигнала - частота подключены соответственно к выходу первого фазового дискриминатора и выходу блока задания частоты.
Кроме того, между выходом второго фазового дискриминатора и входом усилителя мощности введены m последовательно включенных групп из последовательно соединенных дополнительных дискретного преобразователя длительность широтно-импульсного сигнала частота и фазового дискриминатора, другой вход которого подключен к формирователю импульсов, а другой вход каждого из m дискретных преобразователей длительность широтно-импульсиого сигнала - частота подключен к выходу предыдущего дискретного преобразователя длительность широтно-импульсного сигнала - частота.
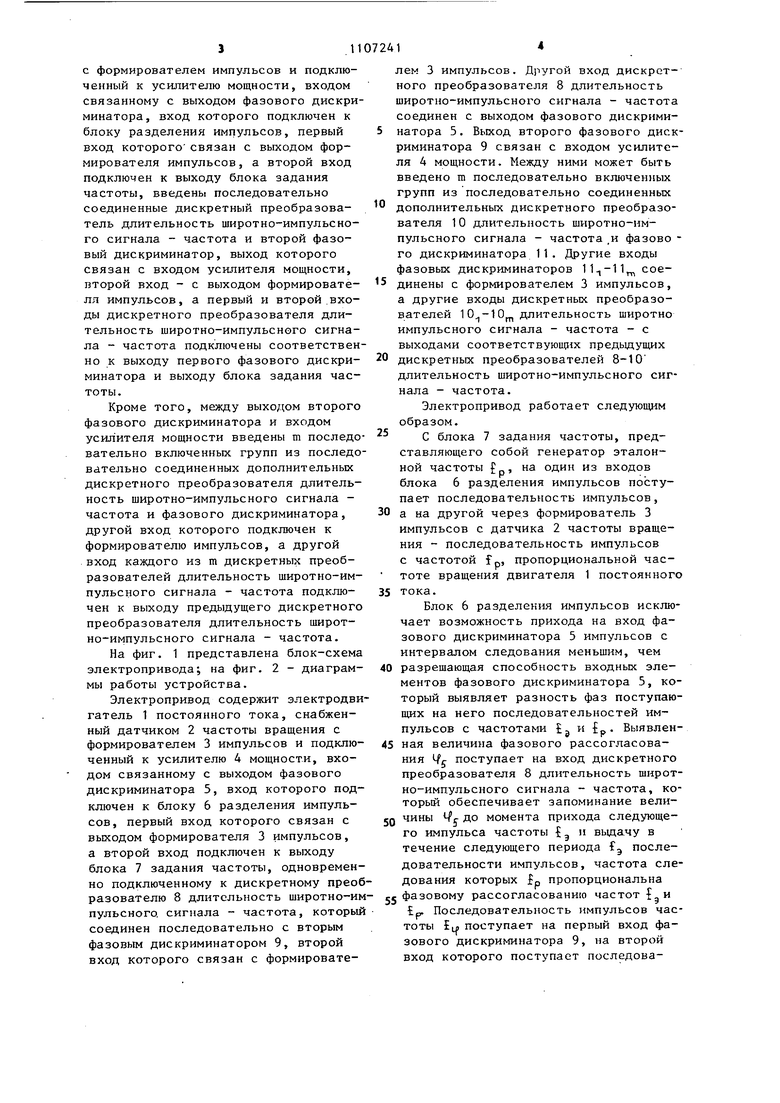
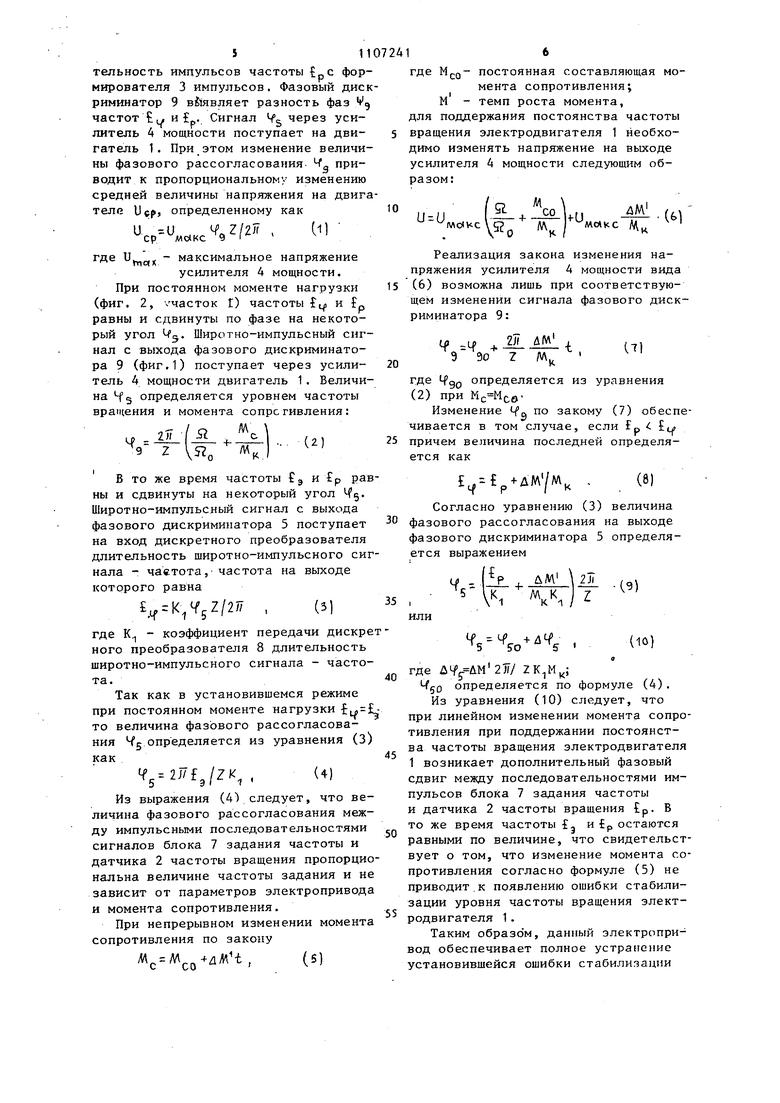
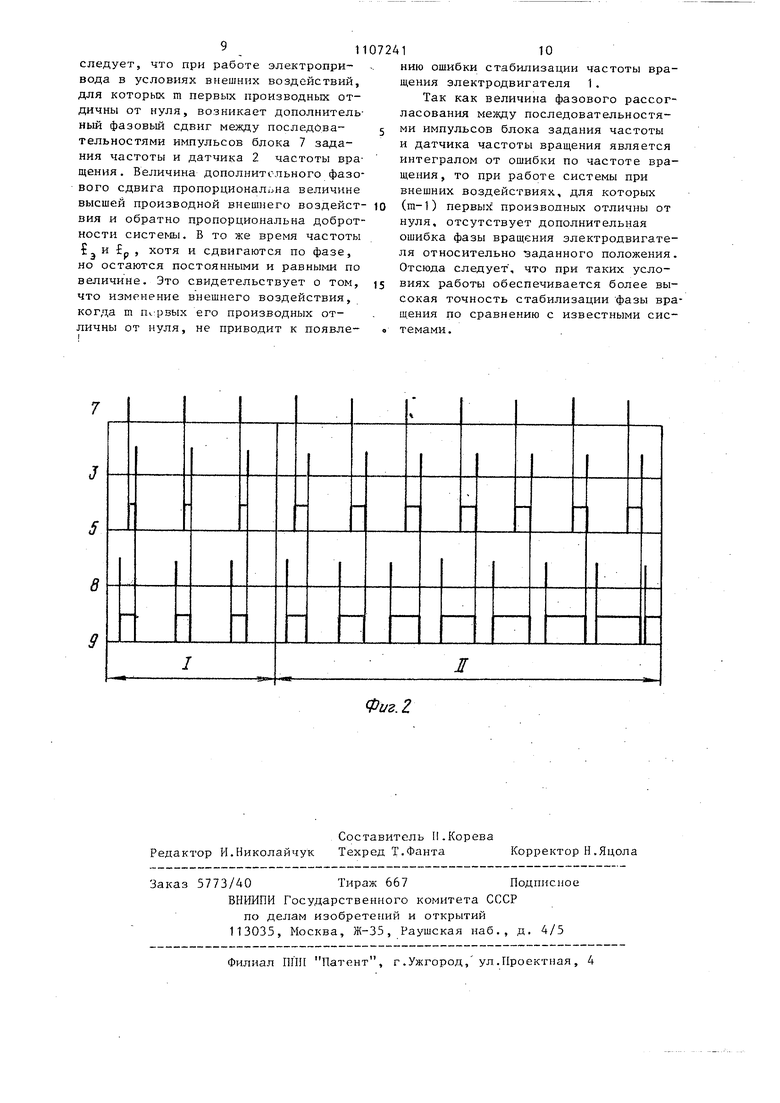
На фиг. 1 представлена блок-схема электропривода; на фиг. 2 - диаграммы работы устройства.
Электропривод содержит электродвигатель 1 постоянного тока, снабженный датчиком 2 частоты вращения с формирователем 3 импульсов и подключенный к усилителю 4 мощности, входом связанному с выходом фазового дискриминатора 5, вход которого подключен к блоку 6 разделения импульсов, первый вход которого связан с выходом формирователя 3 импульсов, а второй вход подключен к выходу блока 7 задания частоты, одновременно подключенному к дискретному преобразователю 8 длительность широтно-импульсного. сигнала - частота, которыйсоединен последовательно с вторым фазовым дискриминатором 9, второй вход которого связан с формирователем 3 импульсов. Другой вход дискретного преобразователя 8 длительность широтно-импульсного сигнала - частота соединен с выходом фазового дискриминатора 5. Выход второго фазового дискриминатора 9 связан с входом усилителя 4 мощности. Между ними может быть введено m последовательно включенных групп из последовательно соединенных дополнительных дискретного преобразователя 1 О длительность широтно-импульсного сигнала - частота ,и фазово го дискриминатора 11. Другие входы фазовых дискриминаторов соединены с формирователем 3 импульсов, а другие входы дискретных преобразователей длительность широтно импульсного сигнала - частота - с выходами соответствующих предыдущих
0 дискретных преобразователей 8-10
длительность широтно-импульсного сигнала - частота.
Электропривод работает следующим образом.
С блока 7 задания частоты, представляющего собой генератор эталонной частоты , на один из входов блока 6 разделения импульсов поступает последовательность импульсов,
0 а на другой через формирователь 3 импульсов с датчика 2 частоты вращения - последовательность импульсов с частотой fp, пропорциональной частоте вращения двигателя 1 постоянного
5 тока.
Блок 6 разделения импульсов исключает возможность прихода на вход фазового дискриминатора 5 импульсов с интервалом следования меньшим, чем
0 разрешающая способность входных элементов фазового дискриминатора 5, который выявляет разность фаз поступающих на него последовательностей импульсов с частотами g и fр. Выявлен5 ная величина фазового рассогласования поступает на вход дискретного преобразователя 8 длительность широтно-импульсного сигнала - частота, который обеспечивает запоминание вели5Q чины Чг до момента прихода следующего импульса частоты {g и выдачу в течение следующего периода f последовательности импульсов, частота следования которых fp пропорциональна 55 фазовому рассогласованию частот f и р. Последовательность импульсов частоты Еи1 поступает на первый вход фазового дискриминатора 9, на второй вход которого поступает последовательность импульсов частоты с мирователя 3 импульсов. Фазовый дис риминатор 9 выявляет разность фаз V частот , и . Сигнал 5 через усилитель 4 мощности поступает на двигатель 1. При этом изменение величи ны фазового рассогласования- Ч- приводит к пропорциональному изменению средней величины напряжения на двиг теле Utp, определенному как , (1 где - максимальное напряжение усилителя 4 мощности. При постоянном моменте нагрузки (фиг. 2, хчасток Г) частоты ц, и { равны и сдвинуты по фазе на некоторый угол Мд. Широтно-импульсный сиг нал с выхода фазового дискриминатора 9 (фиг.1) поступает через усилитель 4 мощности двигатель 1. Величи на -fg определяется уровнем частоты вращения и момента сопротивления: 257 7 Я ... (2; В то же время частоты и €р рав ны и сдвинуты на некоторый угол Чд. Широтно-импульсный сигнал с выхода фазового дискриминатора 5 поступает на вход дискретного преобразователя длительность широтно-импульсного сиг нала - частота, частота на выходе которого равна КЛс2/2Я где К - коэффициент передачи дискре него преобразователя 8 длительность широтно-импульсного сигнала - частота. Так как в установившемся режиме при постоянном моменте нагрузки {ц, то величина фазового рассогласования 45 определяется из уравнения (З) как , (4) Из выражения (4) следует, что величина фазового рассогласования между импульсными последовательностями сигналов блока 7 задания частоты и датчика 2 частоты вращения пропорцио нальна величине частоты задания и не зависит от параметров электропривода и момента сопротивления. При непрерывном изменении момента сопротивления по закону м м.лмЧ, где постоянная составляющая момента сопротивления; М - темп роста момента, для поддержания постоянства частоты вращения электродвигателя 1 необходимо изменять напряжение на выходе усилителя 4 мощности следующим образом:--U c Hcl Реализация закона изменения напряжения усилителя 4 мощности вида (6) возможна лишь при соответствующем изменении сигнала фазового дискриминатора 9: Ч ч.- 9 90 Z где Чдр определяется из уравнения (2) при Мс М вИзменение Ч по закому (7) обеспечивается в том случае, если f р q причем величина последней определяется как + ДМ/М г - f t р Согласно уравнению (3) величина фазового рассогласования на выходе фазового дискриминатора 5 определяется выражением 4- -(9) где Д45- йМ27Г/ определяется по формуле (4) . Из уравнения (10) следует, что при линейном изменении момента сопротивления при поддержании постоянства частоты вращения электродвигателя 1 возникает дополнительный фазовый сдвиг между последовательностями импульсов блока 7 задания частоты и датчика 2 частоты вращения то же время частоты j и р остаются равными по величине, что свидетельствует о том, что изменение момента сопротивления согласно формуле (5) не приводит.к появлению ошибки стабилизации уровня частоты вращения электродвигателя 1 . Таким образом, данный электропривод обеспечивает полное устранение установившейся ошибки стабилизации угловой скорости при работе системы в условиях линейно изменяющихся внеи них воздействий. При внешних воздействиях сложной формы, к уоторых m первых производны не равны нулю, электропривод работает следующим образом. Рассматривая установившийся режим работы электропривода, когда момент сопротивления постоянен,, отметить, что величина фазового рассог ласования V частот датчика 2 (частоты вращения р и дискретного преоб разователя 10п длительность широтно-импульсного сигнала - частота f определяется по выражению (2). В же время частоты на выходе дискретных преобразователей длитель ность широтно-импульсного сигнала частота одинаковы и равны по величине f, поэтому величина фазового рассогласования с последовательностей импульсов блока 7 задания частоты и датчика 2 частоты вращения, выявленная фазовым дискриминатором 5, определяется выражением (4). Отсюда следует, что величина фазового рассогласования частот -fj и fр не зависит от параметров двигателя и момента сопротивления. При непрерывном изменении внешнего воздействия, например момента сопротивления, по закону + -, (11) где ЛМ , лроизводная момента сопротивления, все производные от момента сопротивления с номерами, большими т, равны нулю. Для поддержа ния постоянства частоты вращения электродвигателя 1 необходимо изменять напряжение на выходе усилителя 4 мощности следуюш11М образом: Oz М -I (KC Реализация закона изменения напряжения на выходе усилителя 4 мощности вида (12) возможна при изменении фазового рассогласования на выходе фазового дискриминатора 1 , по закону 2ЛДМ Ц -Lf ч ZW. m mo где Что определяется из формулы (2) при MC HCOИзменением по закону (13) обеспечивается, если частота дискретного преобразователя 10 длительность широтно-импульсного сигнала - частота изменяется по закону п. соответствии с уравнениями (4) и (14) величина фазового рассогласования на выходе фазового дискриминатора 11 . равна LP у, Ш ппдМ . m-l (m-iliO zk где К - коэффициент передачи дискретного преобразователя 10 длительность широтно-импульсного сигнала частота. При этом частота f f. на выходе дискретного преобразователя 10tTi-i длительность широтно-импульсного сигнала - частота равна m(m-l| лМ М а величина фазового рассогласования №-2 выходе фазового дискриминатора 11 „ ; 2Лт(тИ)дЛА Ч - ),0 ZK. Частота на выходе дискретного преобразователя 10fn-2 равна №(т-Я(т-2)дЛЛ П1-3 т-2 э . Рассуждая далее аналогично получаем, что частота на выходе дискретного преобразователя 10 длительность широтно-импульсного сигнала частота:д АЛ uN п к еличина фазового рассогласования д на выходе фазового дискриминатора. определяется как «п- I m 1 4 чП lm-i)/n K. . 5 SO / J Выражение (19) аналогично ранее олученному выражению (10). Отсюда 9 - 1 следует, что при работе электропривода в условиях внешних воздействий, для которых m первых производных отдичны от нуля, возникает дополнитель ный фазовый сдвиг между последовательностями импульсов блока 7 задания частоты и датчика 2 частоты ара щения. Величина дополнительного фазо вого сдвига пропорциональна величине высшей производной внешнего воздейст ВИЯ и обратно пропорциональна доброт ности cиcтe aI, В то же время частоты , и -, хотя и сдвигаются по фазе, но остаются постоянными и равными по величине. Это свидетельствует о том, что изменение внешнего воздействия, когда m OiipsHx его производных отличны от нуля, не приводит к появле7
J 5 8
1 1 I
Фиг. 2 110 нию ошибки стабилизации частоты враш,ения электродвигателя 1. Так как величина фазового рассогласования между последовательностями импульсов блока задания частоты и датчика частоты вращения является интегралом от ошибки по частоте вращения, то при работе системы при внешних воздействиях, для которых (ш-1) первых производных отличны от нуля, отсутствует дополнительная ошибка фазы вращения электродвигателя относительно заданного положения. Отсюда следует, что при таких услоВИЯХ работы обеспечивается более высокая точность стабилизации фазы вращения по сравнению с известными системами.
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Устройство для синхронизации скорости вращения электродвигателя постоянного тока | 1978 |
|
SU748754A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| 1976 |
|
SU826539A1 | |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
