Изобретение относится к области вооружения, в частности к области управляемых, вращающихся по углу крена ракет, и может быть использовано в комплексах артиллерийского, танкового и противотанкового управляемого вооружения, а также малогабаритных управляемых ракет зенитных комплексов.
Известно устройство для управления вращающейся ракетой (Кузовков Н.Т. Системы стабилизации летательных аппаратов (баллистических и зенитных ракет), М.: Высшая школа, 1976 г., [1] с.237-238, рис.7.16), в котором с осью наружной рамки гироскопа угла крена, направленной по продольной оси ракеты, связываются роторы двух синусно-косинусных вращающихся трансформаторов (СКВТ), а их статоры, будучи связанными с корпусом ракеты, вращаются вместе с ракетой. Так как гироскоп крена является свободным астатическим гироскопом, угол поворота статора относительно ротора СКВТ равен углу крена ракеты у, отсчитываемому от вертикального направления. Оси однофазных обмоток, уложенных на роторах, взаимно перпендикулярны. Напротив, обмотки статоров параллельны. К роторам СКВТ подводятся напряжения, величина и фаза которых зависят соответственно от величины и знака линейных рассогласований ракеты относительно оси луча в вертикальной hy (в источнике информации - h2) и горизонтальной hz (в источнике информации - h1) плоскостях, а с выходов статорных обмоток снимаются напряжения, являющиеся продуктами модуляции сигналов линейных рассогласований гармоническими сигналами частотой вращения ракеты по крену, сдвинутыми относительно друг друга на угол π/2: hy·cos(γ), hy·sin(γ), hz·cos(γ), - hz·sin(γ), в соответствии с которыми осуществляется последующее формирование команд управления рулевым приводом (РП).
Данная амплитудная модуляция преобразует сигналы управления из измерительной системы координат, в которой определяются параметры рассогласования hy, hz, во вращающуюся, связанную с ракетой систему координат. Полученные модулированные сигналы поступают на обмотки управления РП, имеющего одну или две пары рулевых органов, вращающихся вместе с ракетой вокруг продольной оси.
В одноканальных ракетах ([1], с.260-261), имеющих одну пару исполнительных органов (рулей), одноканальный сигнал управления на РП формируется в соответствии с зависимостью:

где k - коэффициент передачи.
Недостатком данного устройства является относительная сложность его электромеханических элементов - СКВТ, обеспечивающих реализацию гармонических сигналов.
Наиболее близким к предлагаемому является устройство, в котором СКВТ с целью упрощения аппаратуры заменяют стабилизированным при помощи гироскопа крена коллектором ([1], с.269, рис.7.32).
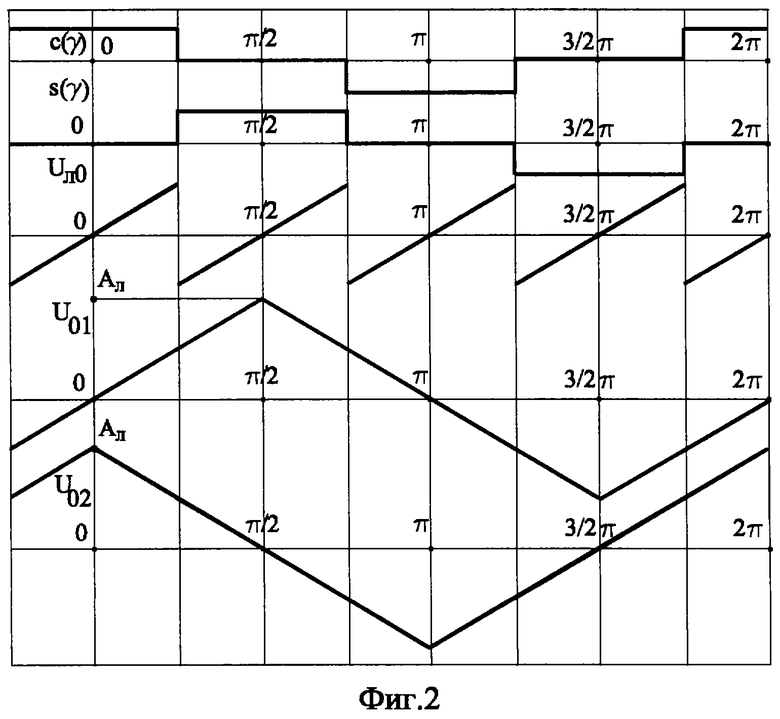
Токосъемники, вращающиеся относительно коллектора вместе с ракетой, периодически контактируют с изолированными относительно друг друга проводящими ламелями, так что на вход вращающегося вместе с ракетой РП поступают амплитудно-модулированные прямоугольные периодические (на частоте вращения ракеты по крену) сигналы. Вид модулирующих функций с(γ), s(γ) приведен на фиг.2.
Одноканальный сигнал управления в этом устройстве формируется в соответствии с зависимостью:
v=k·(hy·c(γ)+hz·s(γ)),
Таким образом, известное устройство формирования команд управления вращающейся одноканальной ракетой включает формирователи сигналов управления в вертикальной и горизонтальной плоскостях, пропорциональных линейным рассогласованиям hy, hz ракеты относительно линии визирования цели, выходы которых соединены соответственно с первыми входами первого и второго модуляторов, сумматор, первый и второй входы которого соединены соответственно с выходами первого и второго модуляторов, датчик угла крена γ ракеты (ДУК), первый выход которого соединен со вторым входом первого модулятора, а второй выход соединен со вторым входом второго модулятора, причем сигналы с первого и второго выходов датчика угла крена являются релейными трехпозиционными сдвинутыми относительно друг друга на угол π/2. Далее сигнал управления с сумматора поступает на одноканальный рулевой привод ракеты.
Недостатком данного устройства, работающего на основе амплитудной модуляции сигналов управления ракетой, принятого за прототип, является необходимость применения в ракете пропорционального РП, для которого отклонения рулей пропорциональны управляющему сигналу. Пропорциональный РП является достаточно сложным электромеханическим устройством, поэтому широкое распространение в ракетах комплексов артиллерийского, танкового и противотанкового управляемого вооружения получили релейные РП, являющиеся наиболее простыми приводами рулевого органа. Для управления ракетой с релейным РП невозможно без потери точности наведения применение рассмотренного устройства, формирующего амплитудно-модулированный сигнал управления, вследствие больших погрешностей отработки такого сигнала релейным РП.
Задачей предлагаемого изобретения является обеспечение высокой точности наведения при использовании в одноканальной вращающейся ракете релейного РП.
Для достижения поставленной задачи необходимо:
- обеспечить пропорциональность величины команд управления и отклонений рулей одноканального релейного РП в каждой из плоскостей исходным сигналам управления в измерительной системе координат,
- обеспечить охват максимально возможного диапазона команд управления.
Поставленная задача решается за счет того, что в известное устройство, содержащее формирователи сигналов управления в вертикальном и горизонтальном каналах, первый и второй модуляторы, сумматор, первый и второй входы которого соединены соответственно с выходами первого и второго модуляторов, датчик угла крена, причем сигналы с первого и второго выходов датчика угла крена являются релейными трехпозиционными сдвинутыми относительно друг друга на угол π/2, вводятся первый и второй усилители-ограничители, подключенные к выходам формирователей сигналов управления соответственно вертикального и горизонтального каналов, формирователь сигналов линеаризации, первый и второй входы которого подключены соответственно к первому и второму выходам ДУК, последовательно соединенные второй сумматор, первый двухпозиционный релейный элемент, четвертый сумматор, последовательно соединенные первый инвертор, третий сумматор, второй двухпозиционный релейный элемент, второй инвертор, причем первый вход второго сумматора и вход первого инвертора подключены к выходу первого усилителя-ограничителя, а выход второго инвертора ко второму входу четвертого сумматора, последовательно включенные пятый сумматор, третий двухпозиционный релейный элемент, седьмой сумматор, последовательно включенные третий инвертор, шестой сумматор, четвертый двухпозиционный релейный элемент, четвертый инвертор, причем первый вход пятого сумматора и вход третьего инвертора подключены к выходу второго усилителя-ограничителя, а выход четвертого инвертора ко второму входу седьмого сумматора, пятый и шестой двухпозиционные релейные элементы, причем вход пятого двухпозиционного релейного элемента и вторые входы пятого и шестого сумматоров подключены к первому выходу формирователя сигналов линеаризации, ко второму выходу которого подключены вход шестого двухпозиционного релейного элемента и вторые входы второго и третьего сумматоров, выходы четвертого и седьмого сумматоров подключены к первым входам первого и второго модуляторов, вторые входы которых соединены с выходами соответственно пятого и шестого двухпозиционных релейных элементов.
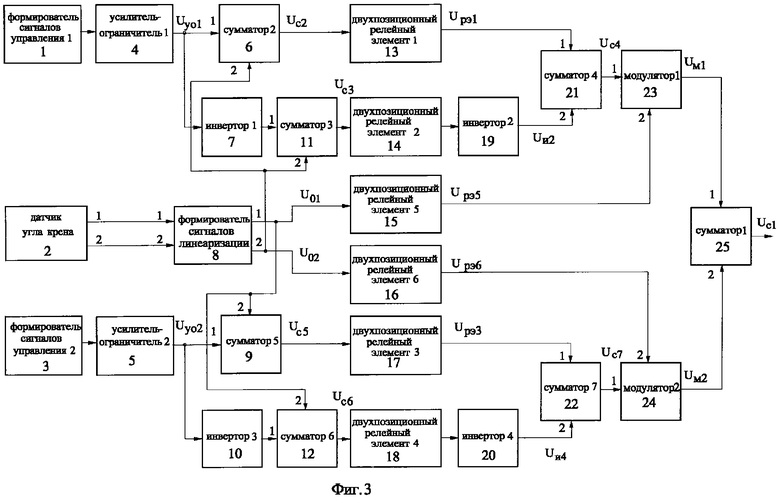
Предлагаемое изобретение поясняется графическими материалами, где на фиг.1 приведена схема устройства - ближайшего аналога, включающего датчик угла крена, формирователи сигналов управления в вертикальной и горизонтальной плоскостях, два модулятора и сумматор, фиг.2 поясняет формирование сигналов линеаризации на основе исходных сигналов с выходов датчика угла крена, на фиг.3 представлена структурная схема предлагаемого устройства формирования команд, фиг.4...8 поясняют формирование команд управления предлагаемым устройством.
Схема предлагаемого устройства формирования команд приведена на фиг.3.
Устройство включает в себя:
формирователи сигналов управления в вертикальном и горизонтальном каналах (1, 3), первый и второй модуляторы (23, 24), первый сумматор (25), первый и второй входы которого соединены соответственно с выходами первого и второго модуляторов, датчик угла крена (2), причем сигналы с первого и второго выходов ДУК являются релейными трехпозиционными сдвинутыми относительно друг друга на угол π/2, первый и второй усилители-ограничители (4, 5), подключенные своими входами к выходам формирователей сигналов управления соответственно вертикального и горизонтального каналов, формирователь сигналов линеаризации (8), причем первый и второй входы формирователя сигналов линеаризации подключены соответственно к первому и второму выходам ДУК, последовательно включенные второй сумматор (6), первый двухпозиционный релейный элемент (13), четвертый сумматор (21), последовательно включенные первый инвертор (7), третий сумматор (11), второй двухпозиционный релейный элемент (14), второй инвертор (19), причем первый вход второго сумматора и вход первого инвертора подключены к выходу первого усилителя-ограничителя, а выход второго инвертора ко второму входу четвертого сумматора, последовательно включенные пятый сумматор (9), третий двухпозиционный релейный элемент (17), седьмой сумматор (22), последовательно включенные третий инвертор (10), шестой сумматор (12), четвертый двухпозиционный релейный элемент (18), четвертый инвертор (20), причем первый вход пятого сумматора и вход третьего инвертора подключены к выходу второго усилителя-ограничителя, а выход четвертого инвертора ко входу седьмого сумматора, пятый и шестой двухпозиционные релейные элементы (15, 16), причем вход пятого двухпозиционного релейного элемента и вторые входы пятого и шестого сумматоров подключены к первому выходу формирователя сигналов линеаризации, ко второму выходу которого подключены вход шестого релейного элемента и вторые входы второго и третьего сумматоров, выходы четвертого и седьмого сумматоров подключены к первым входам соответственно первого и второго модуляторов, вторые входы которых соединены с выходами соответственно пятого и шестого двухпозиционных релейных элементов.
Устройство работает следующим образом.
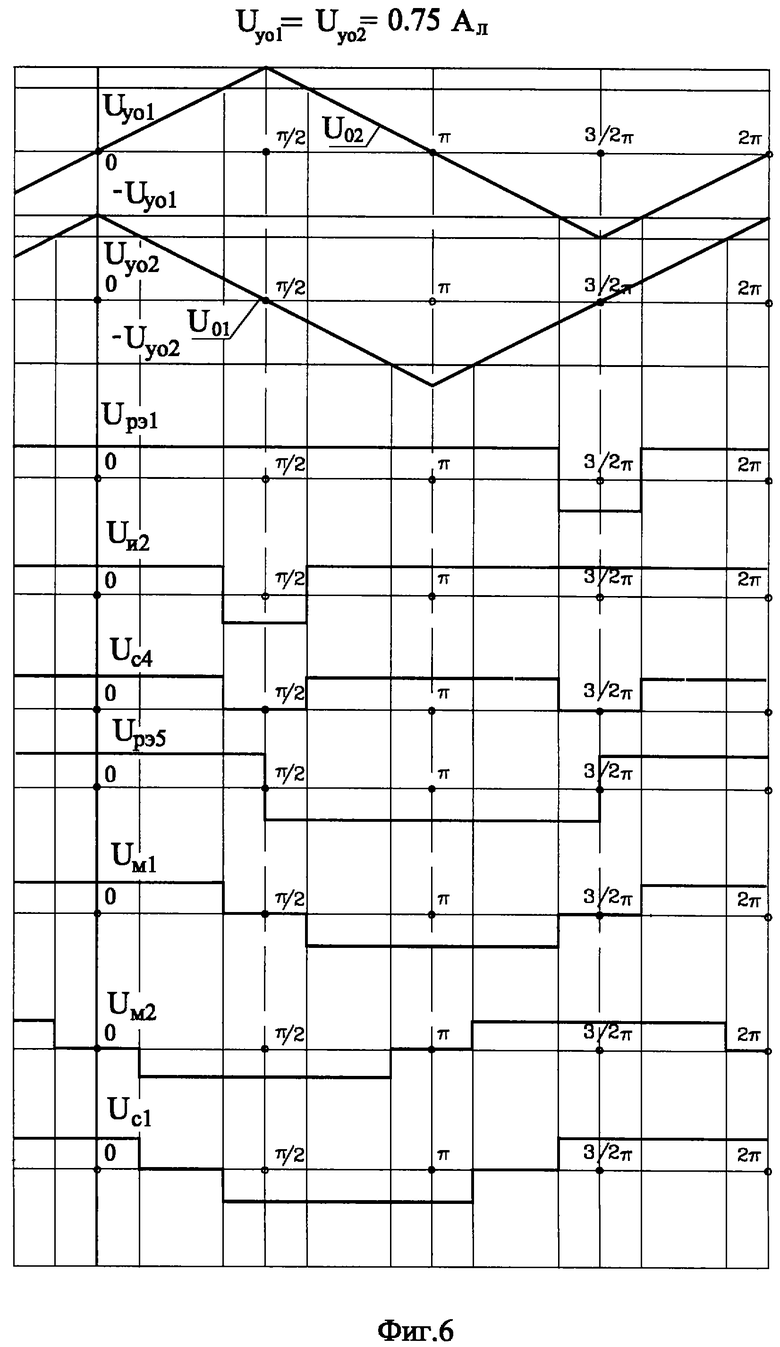
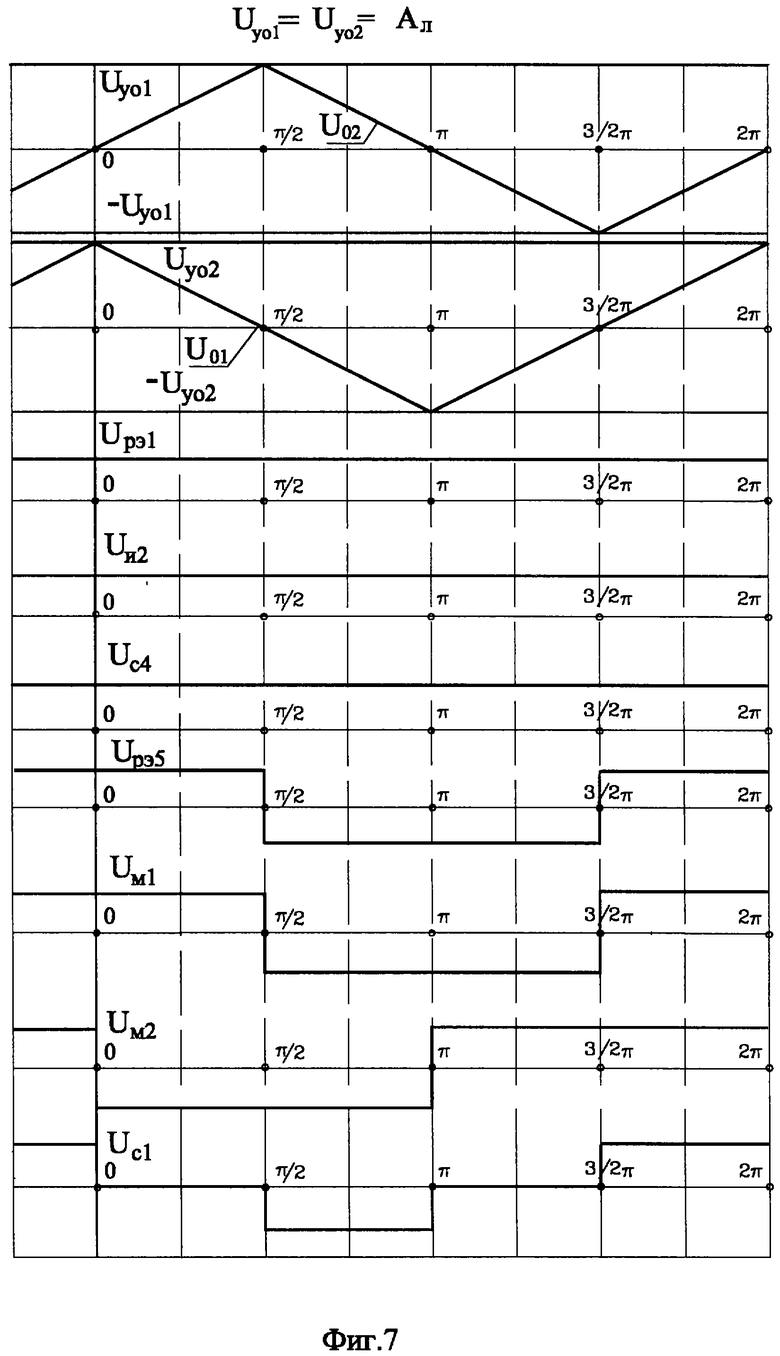
После пуска ракеты формирователи сигналов управления в вертикальной и горизонтальной плоскостях вырабатывают непрерывные сигналы, пропорциональные рассогласованиям ракеты от оси поля управления, одновременно с выходов ДУК поступают периодические опорные сигналы, являющиеся релейными трехпозиционными сдвинутыми относительно друг друга на угол π/2. На основе информации с ДУК формирователь сигналов линеаризации вырабатывает периодические треугольные сигналы амплитуды Ал, сдвинутые относительно друг друга на угол π/2:
Это делается следующим образом:
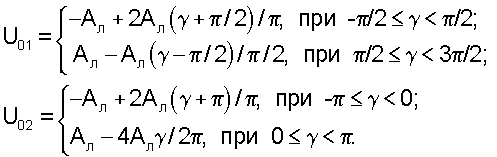
1) на каждом периоде вращения ракеты по углу крена формируют симметричный пилообразный сигнал Uл0:
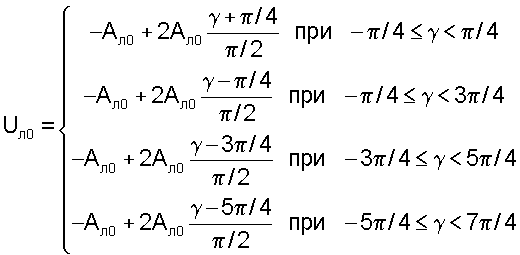
где Ал0 - амплитуда сигнала Uл0,
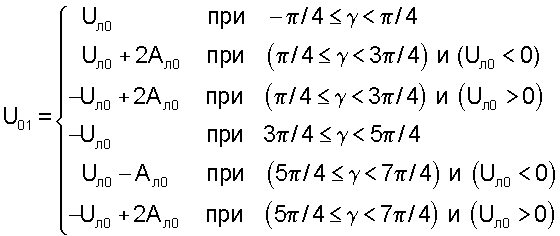
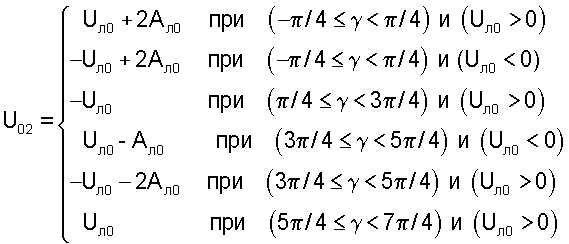
2) далее на основе симметричного пилообразного сигнала формируют сигналы линеаризации:
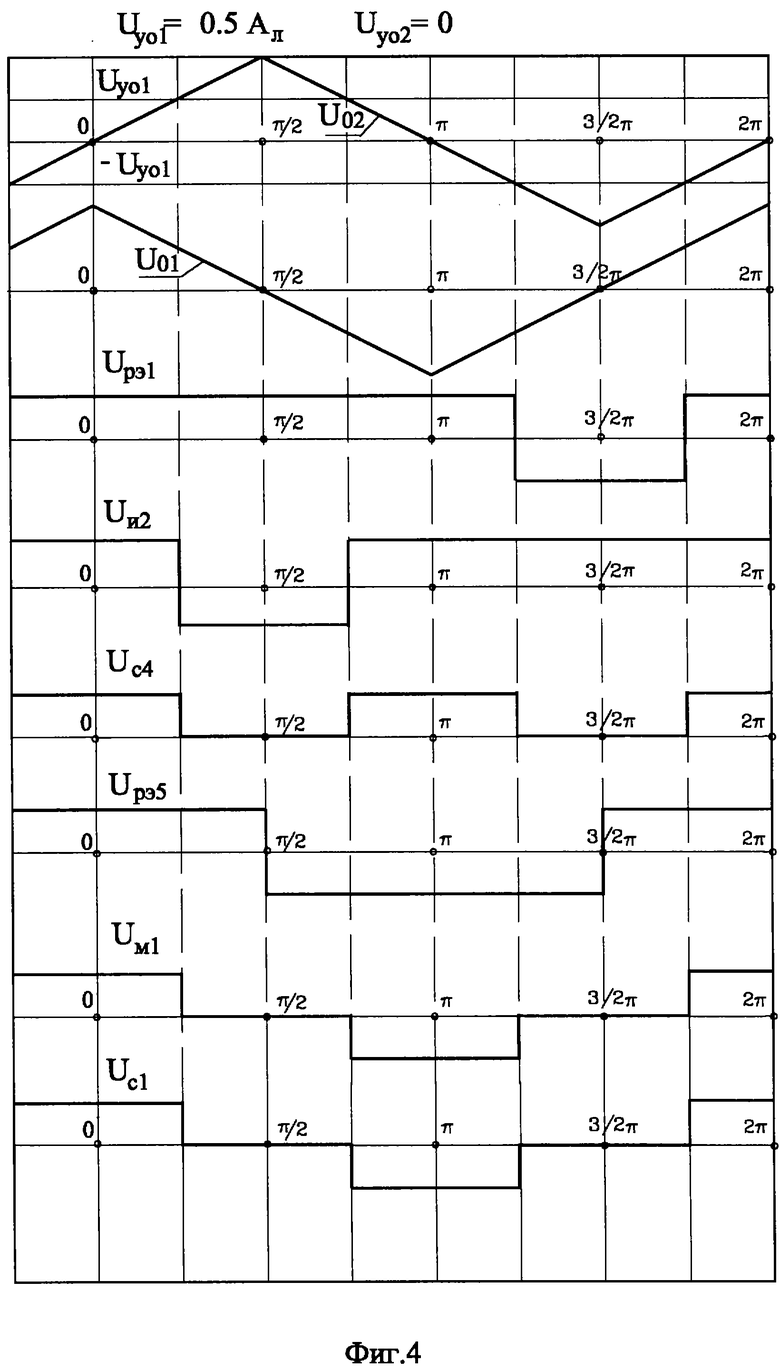
Непрерывные сигналы с выходов формирователей сигналов управления поступают на усилители-ограничители, выходные сигналы которых и сигналы с выходов формирователя сигналов линеаризации поступают во второй и пятый сумматоры, где складываются, причем:
Uc2=Uyo1+U02;
Uc5=Uyo2+U01.
Непрерывные сигналы Uc2, Uc5 поступают в блоки безынерционных (в рабочем диапазоне частот изменения сигналов Uc2, Uc5) соответственно первого и третьего релейных элементов, представляющие собой, например, усилители-ограничители с большим коэффициентом усиления, в которых преобразуются в релейные команды, например, в соответствии с зависимостями:
Uрэ1=m·sign(Uc2);
Uрэ3=m·sign(Uc5),
где m - амплитуда импульсов.
Проинвертированные сигналы с выходов усилителей-ограничителей и сигналы с выходов блока формирователя сигналов линеаризации поступают в третий и шестой сумматоры, где складываются:
Uc3=U02+(-Uyo1);
Uc6=U01+(-Uyo2).
Далее эти сигналы поступают на входы второго и четвертого релейных элементов и преобразуются в релейные команды, которые затем проинвертированные поступают на входы четвертого и седьмого сумматоров, где складываются с релейными командами Uрэ1 и Uрэ3:
Uс4=Uрэ1+Uи2;
Uс7=Uрэ3+Uи4.
Длительность и знак сформированных релейных сигналов определяют величину и направление команд и зависят как от величины непрерывных сигналов Uyo1, Uyo2, так и амплитуды Ал сигналов U01, U02.
Сигнал Uс4 определяет команду управления ракетой по вертикальной оси, a Uс7 - по горизонтальной оси, причем эти команды согласованы с углом крена ракеты.
Из треугольных сигналов линеаризации с помощью пятого и шестого релейных элементов формируют релейные опорные сигналы, необходимые для преобразования полученных релейных команд в связанную с ракетой систему координат.
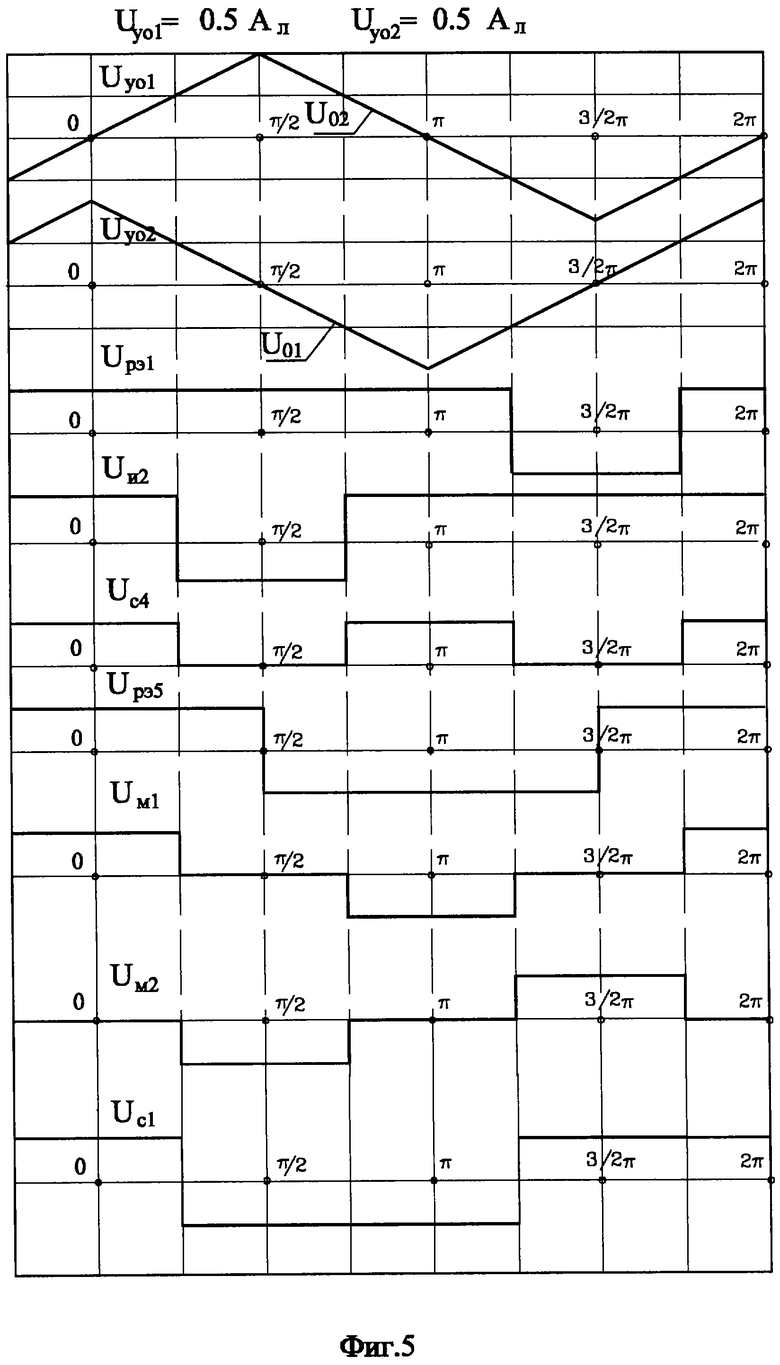
Сигналы с выходов пятого и шестого релейных элементов поступают на опорные входы соответственно первого и второго модуляторов, где они перемножаются с выходными сигналами четвертого и седьмого сумматоров, поступающими на сигнальные входы модуляторов. В результате перемножения релейных команд Uс4 и Uс7 и релейных опорных сигналов Uрэ5 и Uрэ6 на выходах первого и второго модуляторов образуются сигналы Uм1 и Uм2, причем сигнал Uм1 определяет команду управления ракетой по вертикальной оси, а Uм2 команду по горизонтальной оси связанной системы координат.
Сигналы Uм1 и Uм2 складываются в первом сумматоре и поступают на вход РП, который отрабатывает управляющую команду, при этом рулевой орган выкладывается на соответствующий упор, если управляющая команда принимает значение какого-либо уровня, или совершает колебания относительно среднего положения, если управляющая команда принимает нулевое значение.
Таким образом, результирующий одноканальный сигнал управления, поступающий на одноканальный релейный рулевой привод ракеты, является трехпозиционным релейным сигналом, обеспечивающим управление на основе широтно-импульсной модуляции, при которой информация о величине команд заключена в длительности верхнего и нижнего уровней сигнала, соответствующих положению рулей ракеты на одном и другом упоре.
Если для управления ракетой используются не один, а два рулевых органа, то команды на другой привод формируются с помощью устройства описанной конструкции. Отличие заключается в том, что непрерывные опорные сигналы, необходимые для формирования сигнала на другой привод, сдвигаются по фазе относительно U01, U02 на такой же угол, на который вектор подъемной силы, создаваемый другим рулевым органом, повернут относительно вектора подъемной силы, создаваемой первым рулевым органом. Например, если этот угол равен 90 градусов, то и непрерывные опорные сигналы, необходимые для формирования сигналов управления на второй привод, должны быть повернуты относительно сигналов U01, U02 на угол 90 градусов.
Предлагаемое устройство формирования команд управления может быть выполнено следующим образом.
В качестве формирователей сигналов управления может быть использовано устройство, включающее радиолокационную станцию и приемник ракеты, представленное в [1] на с.221. Сумматоры, инверторы, усилители-ограничители могут быть реализованы на основе схем, приведенных в [2] (Тетельбаум И.М., Шнейдер Ю.Р. Практика аналогового моделирования динамических систем. - М., Энергоатомиздат, 1987 г.) на с.43, 62, 63. В качестве модулятора может быть использована схема на рис.2.9, с.125 [2]. Датчик угла крена может быть реализован на основе устройства, представленного в [1] на с.269. Релейные элементы представляют собой усилители-ограничители, выполненные по схемам, представленным на с.232 [2], отличающиеся большим коэффициентом усиления. Формирователь сигналов линеаризации может быть реализован на основе схемы, приведенной в [2] на с.206.
Усилители-ограничители, ограничивающие выходные сигналы формирователей сигналов управления вертикального и горизонтального каналов на уровне 0.6-0.75 Ал, введены с целью расширения линейной зоны устройства формирования команд. При отсутствии этих усилителей-ограничителей, при наличии сигнала линейного рассогласования в одном канале (например, вертикальном), амплитуда которого больше или равна амплитуде сигнала линеаризации (при отсутствии рассогласования в горизонтальном канале) амплитуда первой гармоники выходного сигнала устройства формирования команд управления, определенная по формуле:

где m - амплитуда импульсов,
α - фазовый угол импульсов на выходе устройства равен 1.27 m.
При наличии таких же сигналов рассогласований в обоих каналах амплитуда первой гармоники сигнала на выходе устройства, получившегося в результате суммирования сигналов вертикального и горизонтального каналов на выходном сумматоре, составит 0.9 m, то есть при этом происходит ограничение линейной зоны устройства.
На фиг.4...7 представлен вид сигналов с выхода устройства формирования команд для случаев соответственно:
В табл.1 приведены значения амплитуд первых гармоник выходной команды устройства при наличии максимального сигнала в одном канале при отсутствии сигнала в другом, а также при наличии максимальных сигналов в обоих каналах как без ограничения выходных сигналов формирователей сигналов управления, так и с ограничением сигналов.
 (первая гармоника)
(первая гармоника)
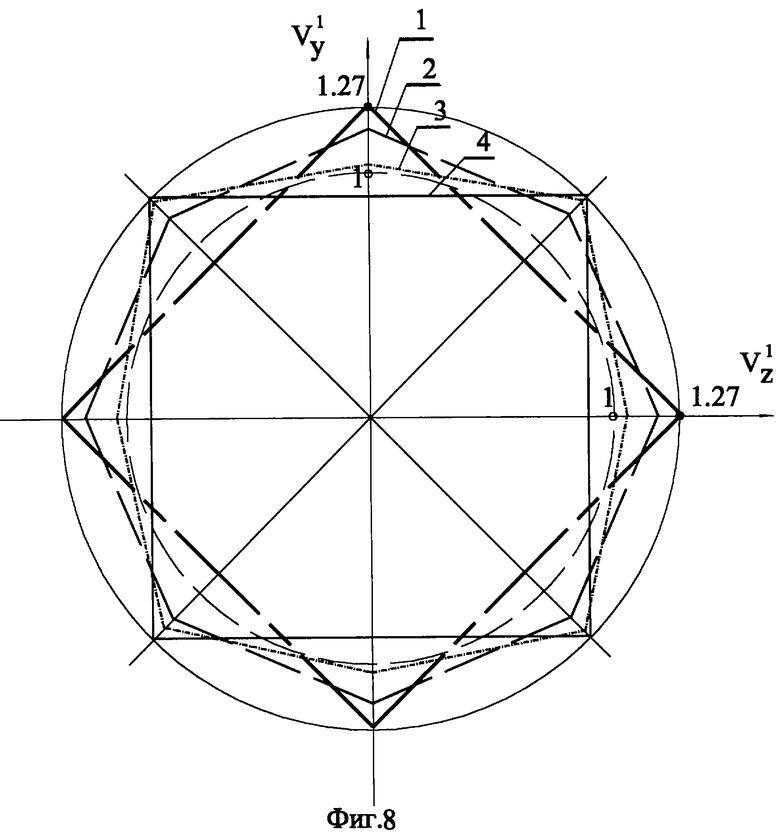
Как видно из табл.1, целесообразно устанавливать ограничения на выходах формирователей сигналов управления на уровне 0.6...0.75 амплитуды сигналов линеаризации, в этом случае линейная зона устройства будет оптимальной, так как амплитуда первой гармоники выходного сигнала будет более 1 m как при наличии максимального сигнала только в одном канале, так и при наличии максимальных сигналов в обоих каналах. На фиг.8 показано поле команд управления, представляющее собой область возможных значений вектора комплексной амплитуды первой гармоники разложения в ряд Фурье выходного сигнала устройства формирования команд, соответствующее таблице 1, где Vy 1 и Vz 1 - проекции этого вектора на оси декартовой системы координат (окружность, изображенная сплошной линией, соответствует максимально возможным значениям модуля комплексной амплитуды первой гармоники выходного сигнала |V|max=4/π=1.27).
Для сравнения на фиг.8 приведено поле команд управления (круг единичного радиуса, изображенный штриховой линией) при формировании команд управления пропорциональным РП в соответствии с зависимостью (1). Как видно из фиг.8, поле команд управления, соответствующее ограничению на выходах формирователей сигналов управления на уровне 0.75 амплитуды сигнала линеаризации, шире поля команд управления пропорциональным РП и приближается к полю максимально возможных команд.
Сформированный предлагаемым устройством сигнал V поступает на одноканальный релейный трехпозиционный РП, осуществляющий отработку этого сигнала, т.е. перекладку рулей в соответствии с изменением его знака. Вращающаяся по углу крена ракета демодулирует отклонение рулей, в результате чего в вертикальной и горизонтальной плоскостях создаются управляющие моменты, пропорциональные соответствующим сигналам рассогласования hy, hz в измерительной системе координат. Таким образом, преимуществом предлагаемого устройства управления одноканальным релейным РП является пропорциональность средней за период вращения по углу крена величины команды в каждой из плоскостей сигналам рассогласования в измерительной системе координат, а также более широкое по сравнению с прототипом поле команд управления, что в процессе последующей отработки указанных команд обеспечит высокую точность наведения вращающихся по углу крена ракет с релейными приводами рулевых органов.
Источники информации
1. Кузовков Н.Т. Системы стабилизации летательных аппаратов (баллистических и зенитных ракет), М.: Высшая школа, 1976, с.221, 237, 238, 260, 261, 269.
2. Тетельбаум И.М., Шнейдер Ю.Р. Практика аналогового моделирования динамических систем, М.: Энергоатомиздат, 1987, с.43, 62, 63, 125, 206, 232.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ФОРМИРОВАНИЯ РЕЛЕЙНЫХ СИГНАЛОВ УПРАВЛЕНИЯ ВРАЩАЮЩЕЙСЯ ПО УГЛУ КРЕНА РАКЕТОЙ | 2000 |
|
RU2184921C2 |
| СПОСОБ НАВЕДЕНИЯ ВРАЩАЮЩЕЙСЯ РАКЕТЫ С РЕЛЕЙНЫМ ПРИВОДОМ РУЛЕВОГО ОРГАНА И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2008 |
|
RU2375667C1 |
| СПОСОБ НАВЕДЕНИЯ ВРАЩАЮЩЕЙСЯ РАКЕТЫ С РЕЛЕЙНЫМ ПРИВОДОМ РУЛЕВОГО ОРГАНА И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2013 |
|
RU2532993C1 |
| СПОСОБ НАВЕДЕНИЯ ВРАЩАЮЩЕЙСЯ РАКЕТЫ С РЕЛЕЙНЫМ ПРИВОДОМ РУЛЕВОГО ОРГАНА И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2005 |
|
RU2310151C2 |
| СПОСОБ ФОРМИРОВАНИЯ КОМАНД УПРАВЛЕНИЯ ВРАЩАЮЩЕЙСЯ ВОКРУГ ПРОДОЛЬНОЙ ОСИ ДВУХКАНАЛЬНОЙ РАКЕТОЙ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2008 |
|
RU2373479C1 |
| СПОСОБ КОМБИНИРОВАННОГО НАВЕДЕНИЯ МАЛОГАБАРИТНОЙ РАКЕТЫ С ОТДЕЛЯЕМОЙ ДВИГАТЕЛЬНОЙ УСТАНОВКОЙ И СИСТЕМА НАВЕДЕНИЯ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2014 |
|
RU2569046C1 |
| СПОСОБ НАВЕДЕНИЯ ВРАЩАЮЩЕЙСЯ РАКЕТЫ И СИСТЕМА НАВЕДЕНИЯ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2011 |
|
RU2486428C1 |
| СПОСОБ ФОРМИРОВАНИЯ КОМАНДЫ УПРАВЛЕНИЯ ОДНОКАНАЛЬНОЙ ВРАЩАЮЩЕЙСЯ ПО УГЛУ КРЕНА РАКЕТОЙ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ (ВАРИАНТЫ) | 2011 |
|
RU2473864C1 |
| УСТРОЙСТВО ФОРМИРОВАНИЯ КОМАНД УПРАВЛЕНИЯ ВРАЩАЮЩЕЙСЯ ВОКРУГ ПРОДОЛЬНОЙ ОСИ РАКЕТОЙ | 2002 |
|
RU2235969C1 |
| СПОСОБ ФОРМИРОВАНИЯ КОМАНД УПРАВЛЕНИЯ РАКЕТОЙ И РАКЕТА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2003 |
|
RU2241949C2 |
Изобретение относится к области вооружения, в частности к области управляемых вращающихся по углу крена ракет, и может быть использовано в комплексах артиллерийского, танкового и противотанкового вооружения, а также малогабаритных управляемых ракет зенитных комплексов. Техническим результатом является достижение высокой точности наведения при использовании в одноканальной вращающейся ракете релейного рулевого привода за счет обеспечения пропорциональности величины команд управления и отклонений рулей одноканального релейного рулевого привода в каждой из плоскостей исходным сигналам управления в измерительной системе координат и обеспечения охвата максимально возможного диапазона команд управления. Сформированный предлагаемым устройством сигнал поступает на одноканальный релейный трехпозиционный рулевой привод, осуществляющий отработку этого сигнала, т.е. перекладку рулей в соответствии с изменением его знака. Вращающаяся по углу крена ракета демодулирует отклонение рулей, в результате чего в вертикальной и горизонтальной плоскостях создаются управляющие моменты, пропорциональные соответствующим сигналам рассогласования в измерительной системе координат. 8 ил., 1 табл.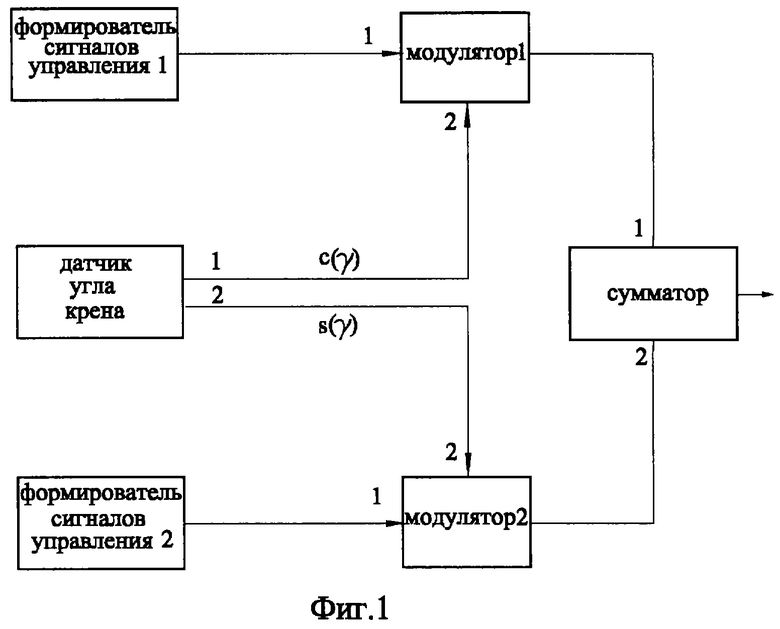
Устройство формирования команд управления вращающейся вокруг продольной оси ракетой, содержащее формирователи сигналов управления в вертикальном и горизонтальном каналах, первый и второй модуляторы, первый сумматор, первый и второй входы которого соединены соответственно с выходами первого и второго модуляторов, датчик угла крена, причем сигналы с первого и второго выходов датчика угла крена являются релейными трехпозиционными сдвинутыми относительно друг друга на угол π/2, отличающееся тем, что в него введены первый и второй усилители-ограничители, подключенные к выходам формирователей сигналов управления соответственно вертикального и горизонтального каналов, формирователь сигналов линеаризации, первый и второй входы которого подключены соответственно к первому и второму выходам датчика угла крена, последовательно соединенные второй сумматор, первый двухпозиционный релейный элемент, четвертый сумматор, последовательно соединенные первый инвертор, третий сумматор, второй двухпозиционный релейный элемент, второй инвертор, причем первый вход второго сумматора и вход первого инвертора подключены к выходу первого усилителя-ограничителя, а выход второго инвертора ко второму входу четвертого сумматора, последовательно включенные пятый сумматор, третий двухпозиционный релейный элемент, седьмой сумматор, последовательно включенные третий инвертор, шестой сумматор, четвертый двухпозиционный релейный элемент, четвертый инвертор, причем первый вход пятого сумматора и вход третьего инвертора подключены к выходу второго усилителя-ограничителя, а выход четвертого инвертора ко второму входу седьмого сумматора, пятый и шестой двухпозиционные релейные элементы, причем вход пятого двухпозиционного релейного элемента и вторые входы пятого и шестого сумматоров подключены к первому выходу формирователя сигналов линеаризации, ко второму выходу которого подключены вход шестого двухпозиционного релейного элемента и вторые входы второго и третьего сумматоров, выходы четвертого и седьмого сумматоров подключены к первым входам соответственно первого и второго модуляторов, вторые входы которых соединены с выходами соответственно пятого и шестого двухпозиционных релейных элементов.
| КУЗОВКОВ Н.Т | |||
| Системы стабилизации летательных аппаратов (баллистических и зенитных ракет) | |||
| - М.: Высшая школа, 1976, с.269 | |||
| УСТРОЙСТВО ФОРМИРОВАНИЯ РЕЛЕЙНЫХ СИГНАЛОВ УПРАВЛЕНИЯ ВРАЩАЮЩЕЙСЯ ПО УГЛУ КРЕНА РАКЕТОЙ | 2000 |
|
RU2184921C2 |
| АВТОКОЛЕБАТЕЛЬНЫЙ РУЛЕВОЙ ПРИВОД ВРАЩАЮЩЕЙСЯ ПО КРЕНУ УПРАВЛЯЕМОЙ РАКЕТЫ | 2000 |
|
RU2184926C2 |
| АВТОКОЛЕБАТЕЛЬНЫЙ РУЛЕВОЙ ПРИВОД УПРАВЛЯЕМОГО СНАРЯДА | 1997 |
|
RU2114387C1 |
| US 5248114 A, 28.09.1993 | |||
| СПОСОБ ПОВЫШЕНИЯ ПРОДУКТИВНОСТИ МОЛОДНЯКА КРОЛИКОВ | 2018 |
|
RU2694626C1 |
| ЕР 0529796 А1, 03.03.1993. | |||

