в исполнительном органе - канате нрямо пропорциональна начальной скорости вращения двигател;.
В случае многомассовых систем зависимость динамическсй составляющей усилия стопореиия от начальной скорости вращения двигателей более сложг1ая.
В ряде механизмов динамическая составляющая усилия стоиорения составляет значительную часть суммарного усилия стопорения.
Зависимость коэффициента запаса прочности исполнительного механизма при стопорепии от начальной скорости привода ведет к тому, что при регулируемой скорости привода коэффициент может быть либо слишком малым, либо неоправданно больщим.
Обеспечить постояпство запаса прочности исполнительного механизма можно путем изменепия статического момента стопорения в зависимости от величины динамической составляющей момента (усилия|) стопорения, однозначно связанной с начальной скоростью привода.
Цель изобретения - обеспечить постоянство запаса прочности рабочего органа приводимого механизма при его стопорении.
Эта цель достигается тем, что в качестве сигпала скорости используют сигнал, пропорциопальный задаипой скорости, а зависимость сигнала обратной связи от суммы сигналов тока нагрузки и заданной скорости устанавливают по критерию обеспечения постоянства суммы динамического и статического усилий, прикладываемых к рабочему органу при его стопореиии.
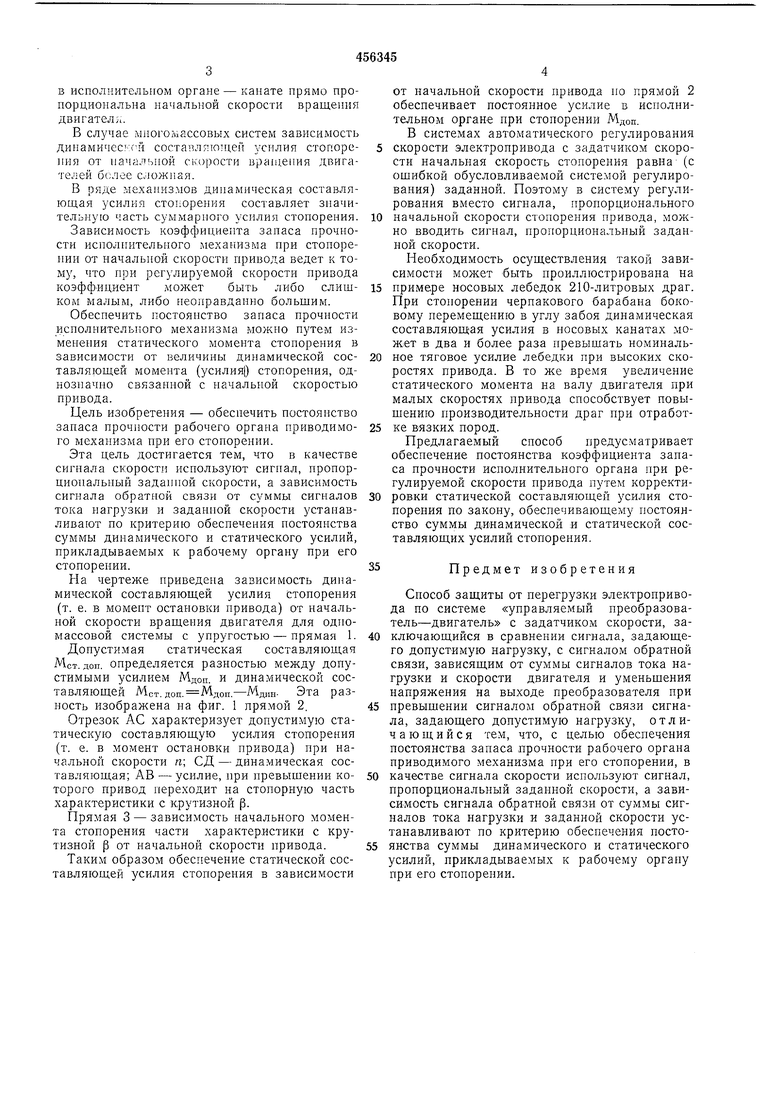
На чертеже приведена зависимость динамической составляющей усилия стопореиия (т. е. в момент остановки нривода) от начальной скорости вращения двигателя для одномассовой системы с упругостью - прямая 1.
Допустимая статическая составляющая Мет. доп. определяется разностью между допустимыми усилием Мдоп. и динамической составляющей Мет. доп.Мдоп.-Мдиы. Эта разность изображена на фиг. 1 прямой 2.
Отрезок АС характеризует допустимую статическую составляющую усилия стопорения (т. е. в момент остановки нривода) нри начальной скорости ге; СД - динамическая составляющая; АВ - усилие, при иревыщении которого привод нереходит на стопорную часть характеристики с крутизной р.
Прямая 3 - зависимость начального момента стопорения части характер,истики с крутизной р от начальной скорости привода.
Таким образом обеспечение статической составляющей усилия стопорения в зависимости
от начальной скорости привода по прямой 2 обеспечивает постоянное усилие в исполнительном органе при стопорении Мдоп.
В системах автоматического регулирования 5 скорости электропривода с задатчиком скорости начальная скорость стопорения равна (с ощибкой обусловливаемой системой регулирования) заданной. Поэтому в систему регулирования вместо сигнала, пропорционального
0 начальной скорости стопорения привода, можно вводить сигнал, пропорциональный заданной скорости.
Необходимость осуществления такой зависимости может быть проиллюстрирована на
5 примере носовых лебедок 210-литровых драг. При стопорении черпакового барабана боковому неремещению в углу забоя динамическая составляющая усилия в носовых канатах моЖ:ет в два и более раза превышать номинальное тяговое усилие лебедки при высоких скоростях привода. В то же время увеличение статического момента на валу двигателя при малых скоростях нривода способствует повыщению производительности драг при отработ5 ке вязких пород.
Предлагаемый способ предусматривает обеснечение постоянства коэффициента запаса прочности иснолнительного органа нри регулируемой скорости нривода путем корректировки статической составляющей усилия стопорения по закону, обеспечивающему постоянство суммы динамической и статической составляющих усилий стопорения.
Предмет изобретения
Способ защиты от перегрузки электропривода по системе «управляемый преобразователь-двигатель с задатчиком скорости, заключающийся в сравнении сигнала, задающего допустимую нагрузку, с сигналом обратной связи, зависящим от суммы сигналов тока нагрузки и скорости двигателя и уменьщения напряжения на выходе преобразователя при
превышении сигналом обратной связи сигнала, задающего допустимую нагрузку, отличающийся тем, что, с целью обеспечения постоянства запаса прочности рабочего органа приводимого механизма нри его стопорении, в
качестве сигнала скорости используют сигнал, пропорциональный заданной скорости, а зависимость сигнала обратной связи от суммы сигналов тока нагрузки и заданной скорости устанавливают по критерию обеспечения постоянства суммы динамического и статического усилий, прикладываемых к рабочему органу при его стопорении.
I .x.,
;x n
Пво-п.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ управления электроприводом черпаковой цепи драги | 1979 |
|
SU1001403A1 |
| Электропривод с ограничением динамических усилий в механизмах экскаватора | 1987 |
|
SU1582314A1 |
| Устройство защиты стрелы от растяжки ковша экскаватора-драглайна | 1977 |
|
SU777157A1 |
| Электропривод постоянного тока | 1980 |
|
SU1023600A1 |
| Способ управления процессом драгирования | 1982 |
|
SU1071709A1 |
| ДАТЧИК ВЕЛИЧИНЫ УСИЛИЯ В МЕХАНИЗМЕ | 1973 |
|
SU377949A1 |
| Устройство защиты стрелы экскаваторадраглайна от растяжки | 1977 |
|
SU737576A1 |
| Карьерная машина для разработкиВзОРВАННыХ СКАльНыХ пОРОд | 1979 |
|
SU829956A1 |
| Способ автоматической коррекции характеристик регулятора частоты электроэнергетического агрегата | 1981 |
|
SU1035769A1 |
| СПОСОБ БЕЗУДАРНОЙ АВТОМАТИЧЕСКОЙ УСТАНОВКИ ПЛАВУЧИХ ОБЪЕКТОВ НА ЗАДАННОЕ УГЛУБЛЕНИЕ И СИСТЕМА ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2020 |
|
RU2747141C1 |

