(5) АСИНХРОННЫЙ ТИРИСТОРНЫЙ ЭЛЕКТРОПРИВОД
| название | год | авторы | номер документа |
|---|---|---|---|
| Асинхронный электропривод | 1983 |
|
SU1150723A1 |
| Устройство для регулирования скорости вращения асинхронного электродвигателя | 1980 |
|
SU905971A1 |
| Электропривод переменного тока | 1980 |
|
SU955482A1 |
| Способ пуска асинхронного электродвигателя и устройство для его осуществления | 1990 |
|
SU1774453A1 |
| Устройство для регулирования скорости асинхронного электродвигателя | 1981 |
|
SU1001410A1 |
| Устройство для управления асинхронным электродвигателем с фазным ротором | 1978 |
|
SU698106A1 |
| Крановый электропривод переменного тока | 1985 |
|
SU1265961A1 |
| Реверсивный тиристорный электропривод переменного тока | 1976 |
|
SU738087A1 |
| Электропривод переменного тока | 1984 |
|
SU1164853A1 |
| ЭЛЕКТРОПРИВОД ПЕРЕМЕННОГО ТОКА | 2003 |
|
RU2251204C1 |
1
Изобретение относится к электротехнике и может быть использовано в электроприводах подъемно-транспортных механизмов.
Известен асинхронный тиристорный электропривод, содержащий выпрямитель в цепи ротора двигателя, тиристорный коммутатор и схему управления тиристорами коммутатора. Управление скоростью двигателя осуществляется изменением скважности включения тиристоров коммутатора системой управления. Для 1)Ормирования жестких механических характеристикустройства привод охвачен отрицательной обратной связью по частоте вращения ротора двигателя. Датчиком обратной связи служит тахогенератор, сигнал которого совместно с сигналом задания используется для управления системы управления тиристорами коммутатора С 1 3Известное устройство обладает малой надежностью из-за наличии тахогенератора.
Наиболее близо.к к предлагаемому по технической сущности и достигаемому результату асинхронный тиристорный электропривод, содержащий асинхронный электродвигатель с фазным ро тором, тиристорный коммутатор с блоком базового управления, включенный в цепь роторной обмотки электродвигателя, а также последовательно соединенные между собой блок задания и блок сравнения, выход которого соединен с входом блока фазового управления, другой вход блока сравнения соединен с выходом датчика частоты тока ротора, вход которого соединен с фазой роторной обмотки электродвигателя .
Однако указанное устройство характеризуется низким быстродействием из20за наличия в датчике частоты тока ротора фильтров.
Цель изобретения - повышение быстродействия.
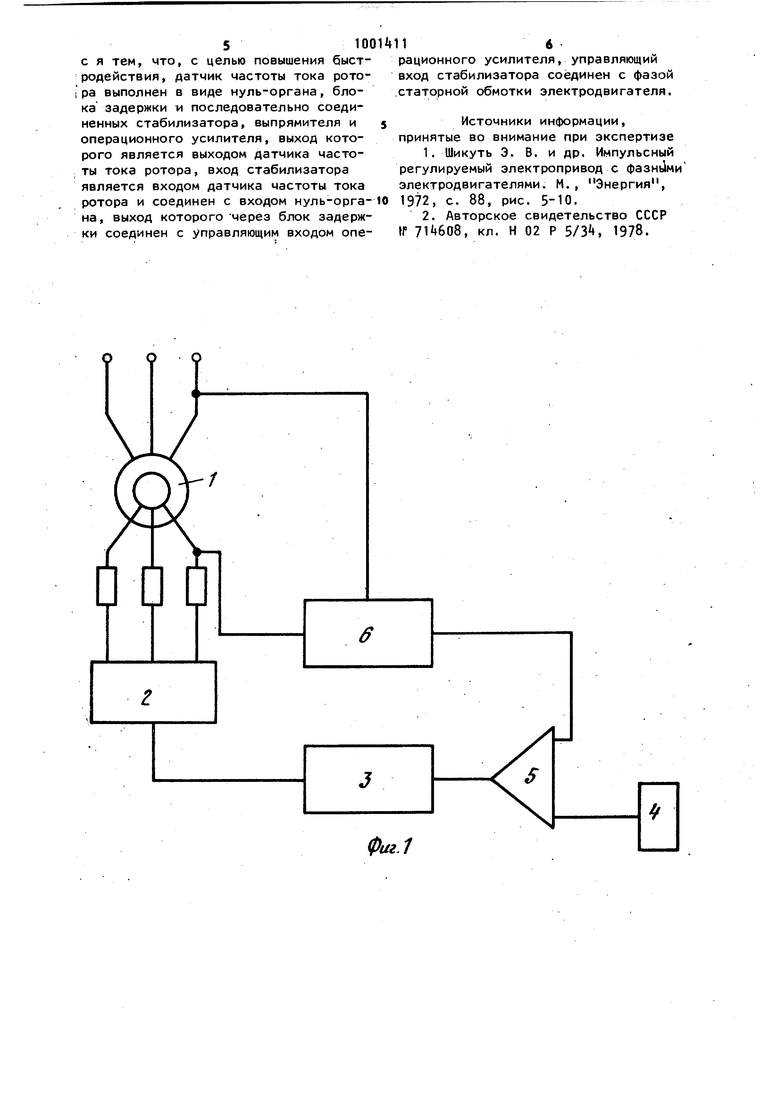
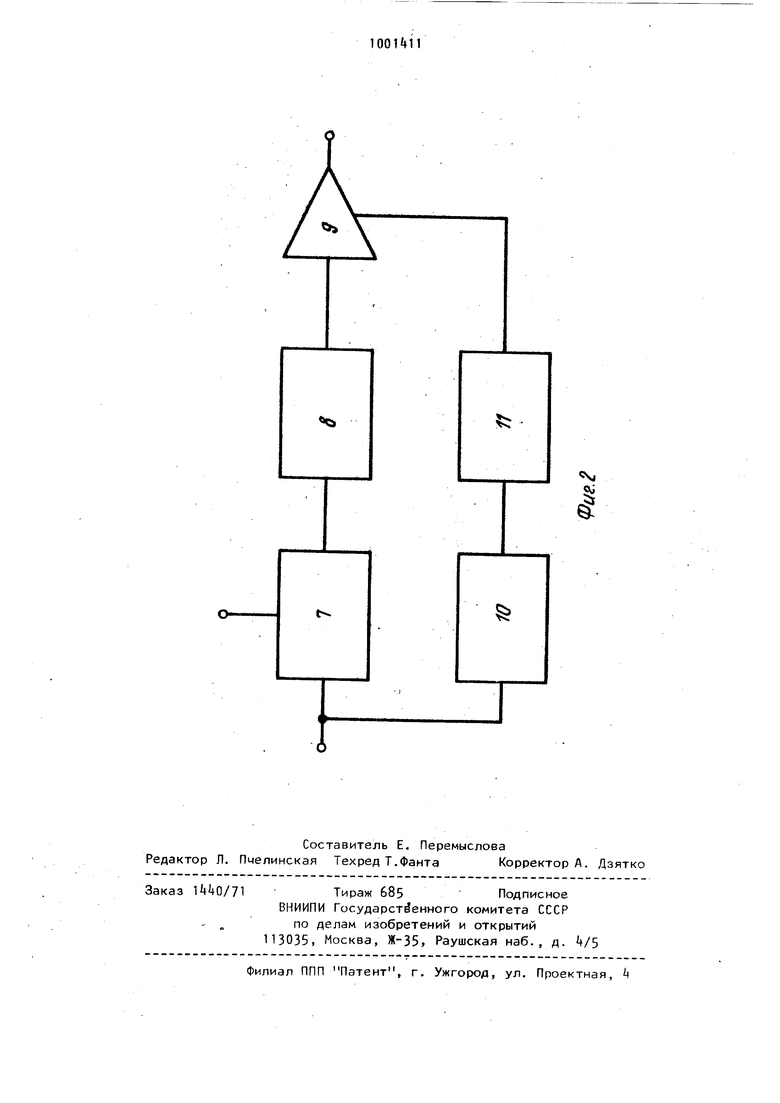
Поставленная цель достигается тем, что в асинхронном тиристориом электроприводе датчик частоты тока ротора выполнен в виде нуль-органа, блока задержки и последовательно соединенных 5 стабилизатора, выпрямителя и операци-, онного усилителя, выход которого является выходом датчика частоты тока ротора, вход стабилизатора авляется входом датчика частоты тока ротора и соединен с входом нуль-органа, выход которого через блок задержки соединен с управляющим входом операционного усилителя , управляющий вход стабилизатора соединен с фазой статорной обмотки электро двигателя. На фиг. 1 изображена структурная схема асинхронного тиристорного- элект ропривода; на фиг. 2 - схема датчика частоты тока ротора. Устройство содержит асинхронный электродвигатель 1 с фазным ротором, тиристорный регулятор 2 в цепи роторной обмотки с блоком 3 фазового управления, а также последовательно соединенные между собой блок k задания и блок 5 сравнения, выход которого соединен с входом блока 3 фазового управления, другой вход блока 5 соединен с выходом датчика 6 частоты тока ротора, вход которого соединен с фазой роторной обмотки электродвигателя. Датчик 6 частоты тока ротора содержит последовательно соединенные стабилизатор 7, выпрямитель 8 и операционный усилитель 9, выход которого является выходом датчика 6, вход стабилизатора 7 является входом датчика 6 и соединен с входом нуль-органа 10, выход которого через блок 11 задержки соединен с управляющим входом операционного усилителя, управляющий вход стабилизатора 7 соединен с фазой статорной обмотки электродвигателя. Устройство функционирует следующим образом. Скорость вращения задается блоком k задания. Соответственно требуемому заданию тиристорный регулятор 2 задает ток ротора электродвигателя 1. Напряжение выбранной фазы подается на вход операционного усилителя 9, находящегося в режиме хранения, и на вход нуль-органа 10. При достижении напряжением нуля нуль-орган генерирует импульс, который спустя время, определяемое параметрами блока 11 задержки
переводит операционный усилитель 9 в режим выборки на время действия указанного импульса. Таким образом, в каждый полупериод напряжения избранной фазы ротора в операционный усилитель 9 записывается мгновенное знамение напряжения, отстоящее от начала полупериода на время, равное времени блока 11 задержки. Очевидно, что величина записываемого напряжения пропорциональна частоте тока ротора /так как частота и напряжение ротора однозначно связаны со скоростью через величину скольжения). Таким образом. напряжение на выходе операционного усилителя 9 пропорционально скорости двигателя. Для исключения погрешности измерений, возникающих из-за колебаНИИ напряжения сети, применен стабилизатор 7, соединенный со статором и изменяющий свой коэффициент передачи обратно пропорционально величине напряжения сети.. Высшие гармоники тока ротора, возникающие при работе тиристоров тиристорного регулятора 2, не влияют на выходной сигнал датчика 6, поскольку время, отсчитываемое от начала каждого полупериода до момента измерений, меньше минимального .времени задержки включения тиристоров регулятора по отношению к моменту их естественного включения. Выходной сигнал датчика 6 суммируется с сигналом задания в блоке 5 и используется для управления электродвигателем. Получение информации о частоте вращения в начале каждого полупериода напряжения ротора обеспечивает высокое быстродействие устройства. Формула изобретения Асинхронный тиристорный электропривод, содержащий асинхронный электродвигатель с фазным ротором, тиристорный коммутатор с блоком фазового управления, включенный в цепь роторной обмотки электродвигателя, а также последовательно соединенные между собой блок задания и блок сравнения, выход которого соединен с входом блока фазового управления, другой вход блока сравнения соединен с выходом датчика частоты тока ротора, вход которого соединен с фазой роторной обмотки электродвигателя, о т л и чающийс я тем, что, с целью повышения быстродействия, датчик частоты тока рото ра выполнен в виде нуль-органа, блока задержки и последовательно соединенных стабилизатора, выпрямителя и операционного усилителя, выход которого является выходом датчика частоты тока ротора, вход стабилизатора является входом датчика частоты тока ротора и соединен с входом нуль-органа, выход которого -через блок задержки соединен с управляющим входом операционного усилителя, управляющий вход стабилизатора соединен с фазой статорной обмотки электродвигателя.
Источники информации, принятые во внимание при экспертизе
j
