Обычный ленточный тормоз двухстороннего действия имеет тот недостаток, что величина его тормозного момента резко изменяется в зависимости от величины коэффициента трения, которая колеблется в широких пределах, зависящих от эксплуатационных факторов. Затяжку тормозной ленты приходится назначать из расчета на минимальный коэффициент трения. При этом, с одной стороны, работа затяжки тормоза настолько возрастает, что в ряде случаев для ее выполнения необходимо применение сервомотора, с другой стороны, при резком увеличении коэффициента трения, тормозной момент достигает значений, опасных для прочности механизма. Известные ленточные тормоза с устройствами для уменьшения работы затяжки и ограничения величины тормозного момента не применимы к мехаиизммам, работаюнщм в обе стороны.
Описываемый тормоз уменьшает работу затяжки и ограничивает величину максимального тормозного момента при использовании па механизмах, работающих в обе сторо1Ы.
Особенностью тормоза является то, что, с целью уменьшения работы затяжкн тормозной ленты и ограничения величины максимального тормозного момента, рычажный механизм управления установлен в плоскости, параллельной оси тормозного барабана и выполнен в внде плаваюи1,его тормозного рычага, шарнирно связанного с концами тормозной ленты.
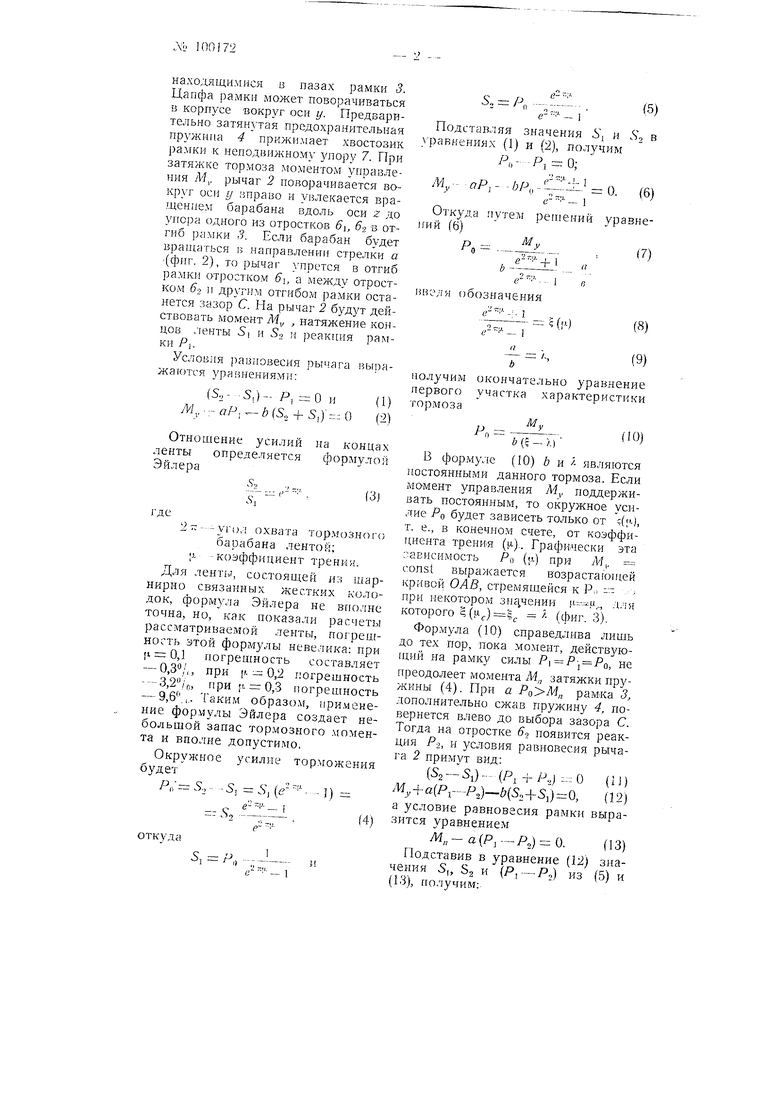
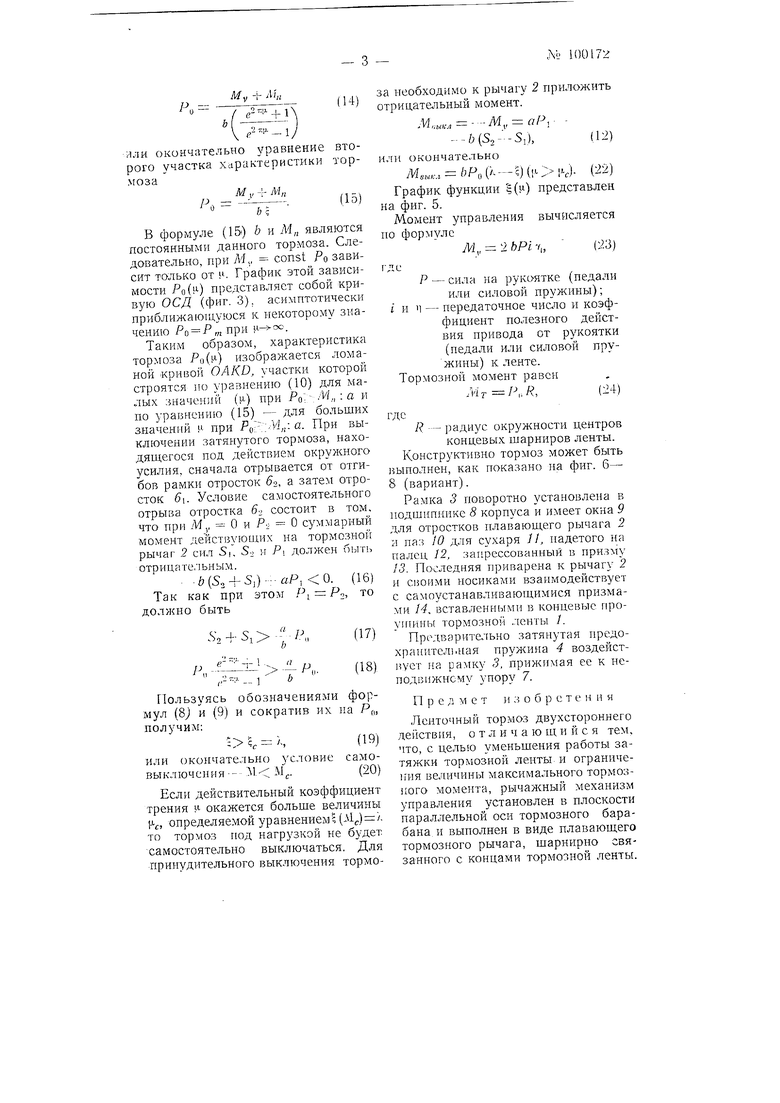
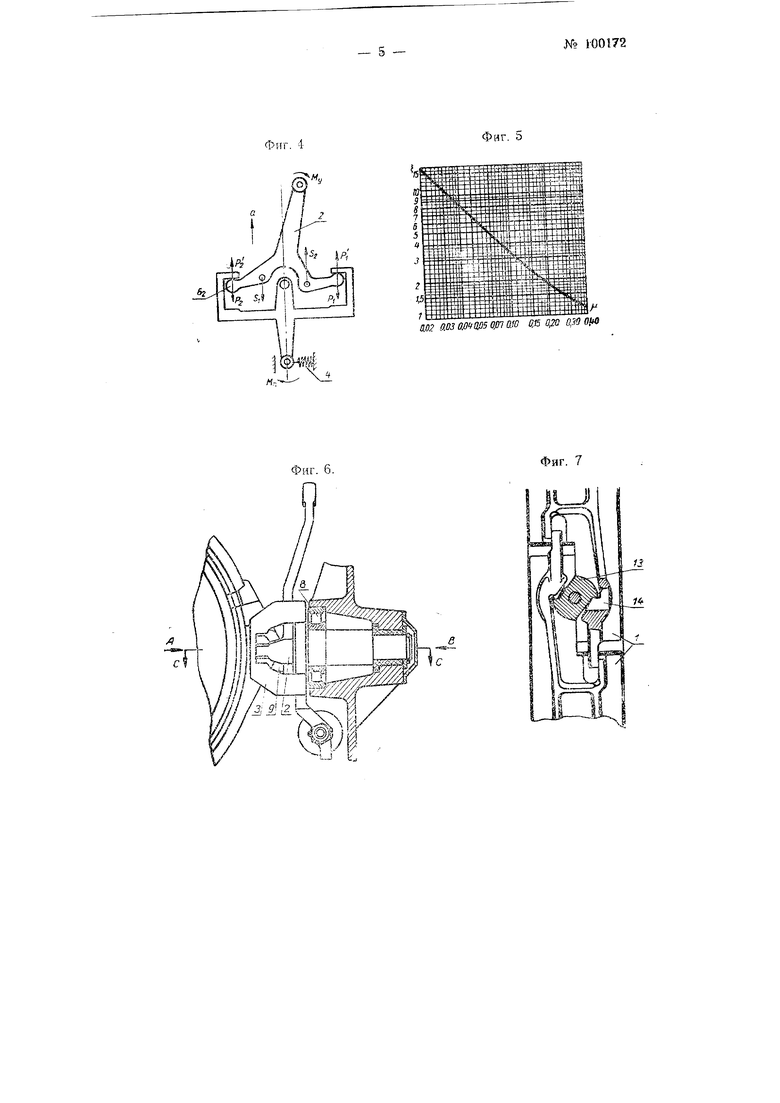
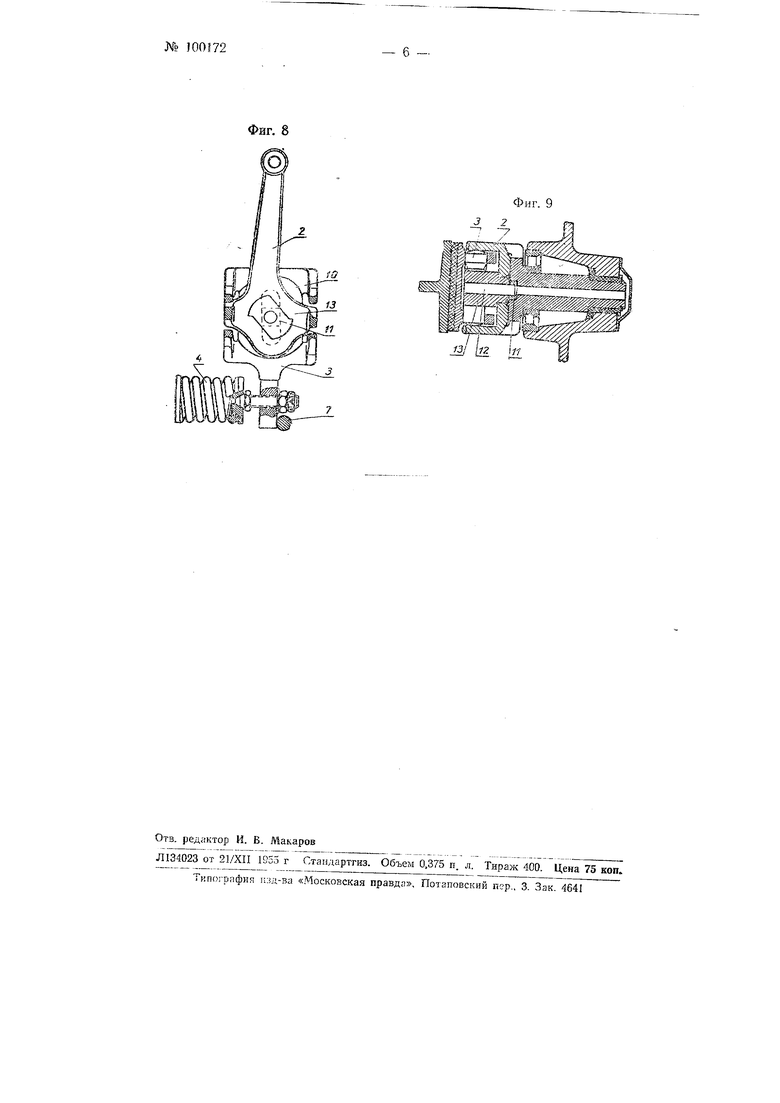
На фиг. 1 схематически изображен тормоз двухстороннего действия, согласно изобретению; на фиг. 2 - часть тормоза в начале торможения; на фиг. 3 -- характеристика тормоза; на фиг. 4 - часть тормоза в конне торможения; на фнг. 5 - график 1:спользования тормоза при разных коэффициентах трення; на фиг. 6 - вид тормоза сбоку; на фиг. 7 -- пид тормоза спереди по стрелке R фиг. 6; на фнг. 8 -- вид тормоза сзади по стрелке А фиг, 6; на фнг. 9 - тормоз Б горизонтальном разрезе по СС фиг. 6.
Тормоз состоит из тормозного барабана, охватываюшей его тормозной ленты 1, плавающего тормозного рычага 2, рамки 3 и предохранительной пружины 4.
Перекрываюн1,ие друг друга концы ленты / посредством шарниров 5 н 5-2 с двумя степенями свободы соединены с рычагом 2, имеющим возможность поворачиваться вокруг оси у н перемешаться вдоль оси z. Рычаг 2 снабжен отростками б н 6,
находящимися в пазах рамки 3. Цапфа рамки может поворачиваться в корпусе вокруг оси у. Предварительно затянутая предохранительная прзжииа 4 прижимает хвостовик ралгки к неподвижному упору 7. При затяжке тормоза моментом з-правления М, рычаг 2 поворачивается вокруг оси у вправо и увлекается вращением барабана вдоль оси z до упора одного из отростков 6, 6-2 в отгиб рамки 3. Если барабан будет вращаться в направлении стрелки а (фиг. 2), то рычаг упрется в отгиб рамки отростком 6i, а между отростком 6-2 и другим отгибом рамки останется зазор С. На рычаг 2 будут действовать момент уИ,, , натяжение концов ленты Si и S., и реакния рамки Р.
Условия |)авиовесия рычага 1,ьгражаются зравнениями:
(52-5,)- Р, 0 п(1)
М, - г аР, b (S. -f 5,) О (2)
Отношение усилий ленты определяется Эйлера
.9,
где
2 --УГОЛ охвата тор.М(зно1()
барабана лентой; I- коэффициент трени«. Для лентьг, состоящей и:-1 шарнирно связанных жестких колодок, формула Эйлера не вполне точна, но, как ноказали расчеты рассматриваемой ленты, погрещность этой формЗлы невелика: при 1 - 0,1 погрешность составляет
-0,,, при . - 0,2 погрешность --3,,, при (1. - 0,3 погрешность
-9,6-,,,. Таким образом, применение формулы Эйлера создает небольшой запас тормозного .момента и вполне допусти.мо.
Окружное усилие торможения будет
P,,- S,S,( -3)
-.(4)
f- -
о тку .а а
- Р и
Oj - / ,) п
и -- - 1
S Р
(5)
Подставляя значения 5 и Л , в равнепиях (1) и (2), получим
Л,
М, оР,- - 1}Р„ - ---i-J 0. (6) 1
Откуда путем решений уравнепий (6)
/о-- - ---- (7)
b -
введя обозначения
(8) (9)
(fO
получим окончательно уравнение первого участка характеристики тормоза
Afv
«)
В формуле (10) b н - являются иостояршыми данного тормоза. Если момент управления М,, поддерживать постоянным, то окружное усилие РО будет зависеть только от с(;-), т. е., в конечном счете, от коэффициента тренИЯ (и-). Графически эта .зависимость РО () при Ж,, const выражается возрастаюп1ей кривой ОАВ, стремящейся к Р, - - ; при neKOTopOiM зиг чении и-,,., л/;я которого ( - (фиг. 3).
Формула (10) справедлива лищь до тех пор, пока момент, действую пий на рамку силы Ро, не
преодолеет момента М„ затяжки пружины (4). При а рамка 3, .дополнительно сжав пружину 4, повернется влево до выбора зазора С. Тогда на отростке б , появится реакция Р-), и условия равновесия рычага 2 примзт вид:
(52--5,)--(Л4-Р,).::0 (iJ)
М, + a{P,.-b{S,+S,)0,(12)
а условие равновесия рамкивыразится уравнением
,)0.(13) Подставив в уравнение (12) значения S|, 83 и (Я,-Р,) из(5) и (13), получим: MV -h Л/,г --(14) , или окончательно уравнение второго участка характеристики тормозаМу о - I - В формуле (15) b и М„ являются постоянными данного тормоза. Следовательно, при Л1„ const РО зависит только от 11. График этой зависимости -Ро(и-) представляет собой кривую ОСД (фиг. 3). асимптотически приближаюихуюся к некоторому значению Ро -РтПрИ -. Таким образол1, характеристика тормоза Р()(-} изображается ломаной кривой OAKD, участки которой строятся ио уравнению (10) для малых значений (Р-) при РО, М„:а и по уравнению (15) - для больших значений при Р(,.: а. При выключении затянутого тормоза, находягцегося под действием окружного усилия, сначала отрывается от отгибов рамки отросток ба, а затем отросток 6{. Условие самостоятельного отрыва отростка 6-, состоит в том, что при М,, О и РЙ О суммарный момент деиствуюп1их на тормозной рычаг .2 сил S|, S и PI должен быгь отрицательным. -6(S2 + Sj):-aP, 0. (16) Так как при этом Р,гР2, то должно быть b2 + ,,(17) n-5z;t f Я,,. (18) Пользуясь обозначениями формул (8J и (9) и сократив их на Pf,i получим; . А,(19) или окончательно условие самовыключения -- 1- М.(20) Если действительный коэффициент трения i-i окажется больше величины IJ-c, определяемой уравнением (1):/, то тормоз иод нагрузкой не будет самостоятельно выключаться. Для принудительного выключения тормоа необходимо к рычагу 2 приложить трицательный момент. ;И„,« - -Л1„ оР, - fc(S2--S,),(12) ли окончательно M,,.«,,(.)()- (2) График функции §(ii) представлен а фиг. 5. Момент управления вычисляется о формуле Л „-2feP r„(23) Р - сила на рукоятке (педали или силовой пружины); I и ч - передаточное число и коэффициент полезного действия привода от рукоятки (недали или силовой пружины) к ленте. Тормозной момент равен ,R,(24) R - радиус окружности центров концевых шарниров ленты. Конструктивно тормоз может быть выполнен, как показано па фиг. б- 8 (вариант). Рамка 5 поворотно установлена в иодшиикике «5 корпуса и имеет окна 9 для отростков плаваюшего рычага 2 и наз 10 для сухаря 11, падетого на палец 12, запрессованный в призму 13. Последняя приварена к рычагу 2 1Г своими носиками взаимодействует с самоустанавливающнмися призмами 14, вставленными в концевые проун1ииы тормозной .ленты /. Предварительно затяиутая предохранительная пружина 4 воздействует па рамку 3, прижимая ее к неподвижному упору 7. П р е j мет и а обр е т е н и я Ленточный тормоз двухстороннего действия, о т л и ч а ю щ и и с я тем, что, с целью уменьшения работы затяжки тормозной ленты и ограничения величины максимального тормозного момента, рычажный механизм управления установлен в плоскости параллельной оси тормозного барабана и выполнен в виде плавающего тормозного рычага, шарнирно связанного с концами тормозной ленты.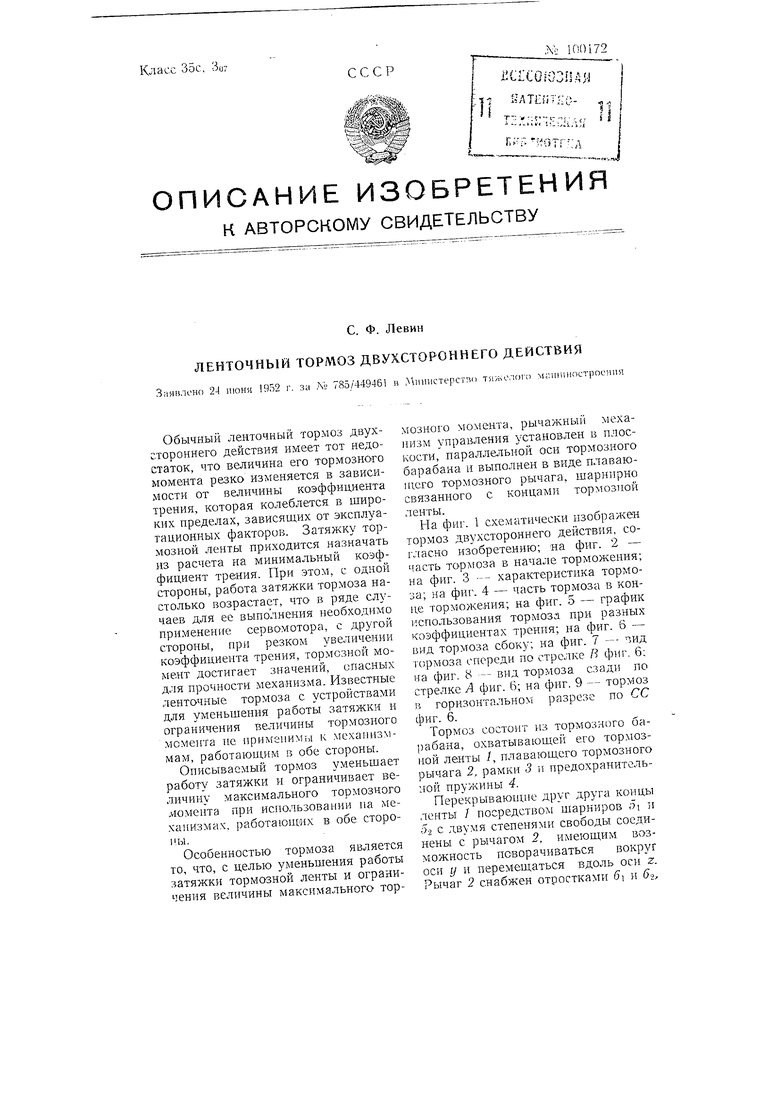
| название | год | авторы | номер документа |
|---|---|---|---|
| Ленточный тормоз | 1952 |
|
SU100691A1 |
| ЛЕНТОЧНЫЙ ТОРМОЗ-ИЗМЕРИТЕЛЬ | 1965 |
|
SU173551A1 |
| Устройство для затяжки ленточного тормоза | 1981 |
|
SU1013645A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ЭКСПЛУАТАЦИОННЫХ ПАРАМЕТРОВ ПРИ КВАЗИЛИНЕЙНОЙ ЗАКОНОМЕРНОСТИ ИХ ИЗМЕНЕНИЯ В ЛЕНТОЧНО-КОЛОДОЧНЫХ ТОРМОЗАХ БУРОВЫХ ЛЕБЕДОК | 2010 |
|
RU2507423C2 |
| Устройство для испытания передач под нагрузкой | 1951 |
|
SU100769A1 |
| Устройство для затяжки ленточного тормоза | 1974 |
|
SU496399A1 |
| АНТИБЛОКИРОВОЧНАЯ ТОРМОЗНАЯ СИСТЕМА С АВТОМАТИЧЕСКИМ УПРАВЛЕНИЕМ ПРИ АВАРИЙНОМ ТОРМОЖЕНИИ ТРАНСПОРТНОГО СРЕДСТВА | 2004 |
|
RU2277480C2 |
| Ленточный тормоз | 1985 |
|
SU1339335A1 |
| СПОСОБ ОЦЕНКИ ВНЕШНИХ И ВНУТРЕННИХ ПАРАМЕТРОВ УЗЛОВ ТРЕНИЯ ПРИ ИСПЫТАНИИ В СТЕНДОВЫХ УСЛОВИЯХ | 2015 |
|
RU2647338C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ГЕОМЕТРИЧЕСКИХ ПАРАМЕТРОВ ТОРМОЗНЫХ ШКИВОВ ЛЕНТОЧНО-КОЛОДОЧНЫХ ТОРМОЗОВ БУРОВЫХ ЛЕБЕДОК (ВАРИАНТЫ) | 2012 |
|
RU2534158C2 |
Фиг. 3
-/
xV
Фиг. 4Фиг. 5
/ t I I 1 ч ......,.- 1
но а1}ЗО.ОЧ(Ц).Ю СЯ З В,
Фиг. 6.
Фиг. 7
74
Фиг. 9
