И:юбрстение относится к машиностроению, в частности к ленточным тормозам, и может быть ис11оль;ювано в тормозных системах различных ма1нин.
Цель изобретения улучн1ение : кс11лу- атационных качеств нутем снижения унрав- ляюн1его усилия при одновременном уменьшении хода унран.тяюшего рычага.
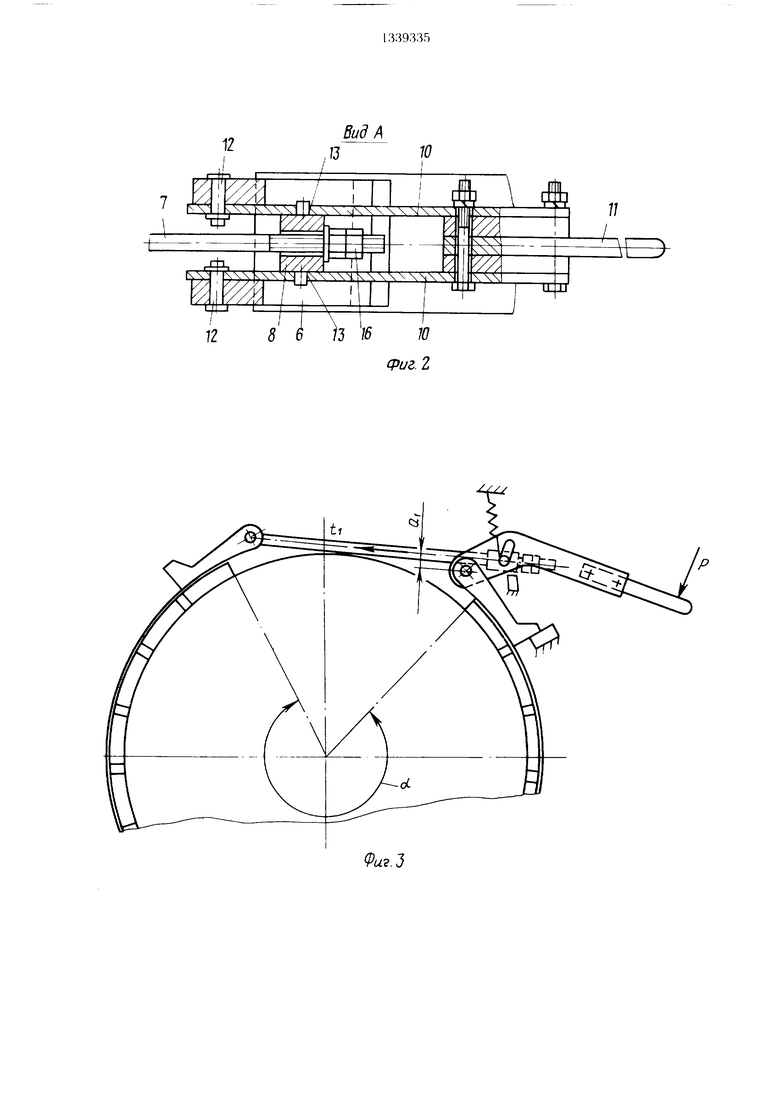
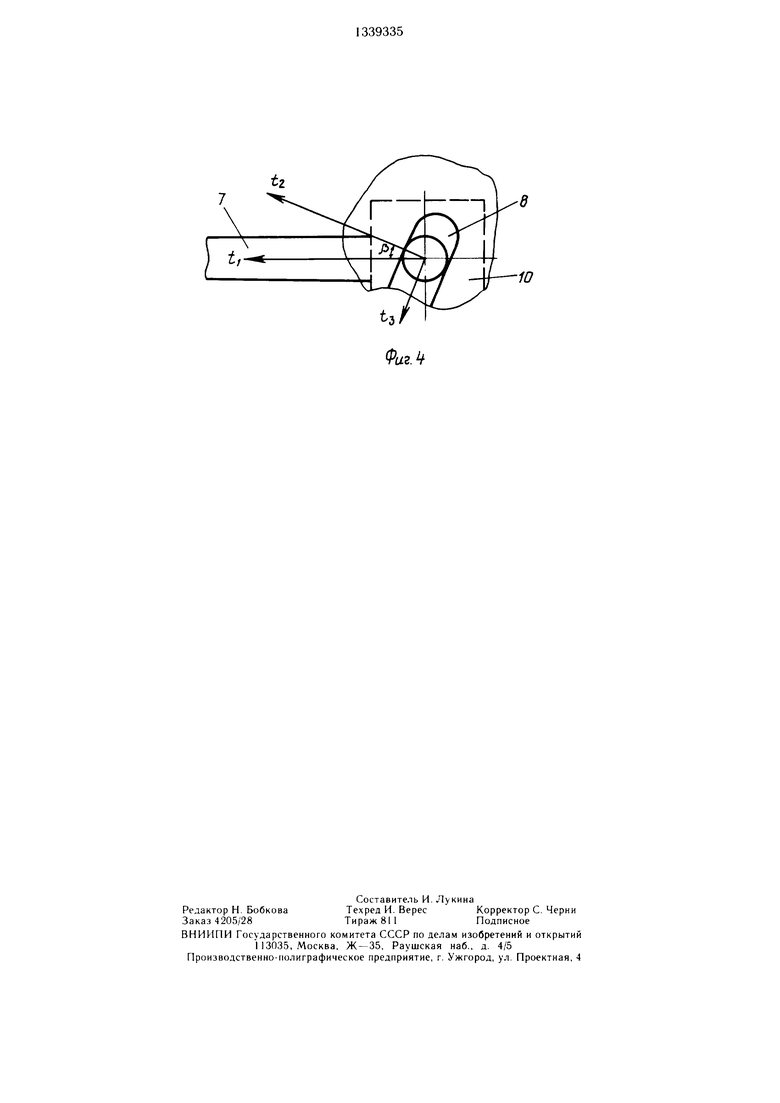
На фиг. i изображен ленточный тормоз до начала торможения, общий вид; на фиг. 2 вид А на фиг. 1; на фиг. 3 тормоз в момент т()(1М()жения, обн1ий вид; на фнг. 4 - схема сил, де11стиук)1них в паре наз-ползун.
.Ченточный тормоз содержит тормозной шкив I, охватывающую его торм(.)знук) ленту 2, сбегаюн1ая 3 и набе аюни1Я 4 ветви которой оканчиваются нроун инамн о и (i. 1роу1нина Г) сбегаюни й ветви Н1арнирн() соединена с гягой 7, к(JTOpaя связана с нол- зуном 8.
ripoyiHHua () набегак)Н1ей ветви 4 онирает- ся о неподвижный упор 9. Шеки 10 рычага 11 управления Н1арнирно соединены с нроу- Н1ИНОЙ Г) двумя отдельными ося.ми 12, расположенными соосно в нроун1ине В. Таким образом, нроун1ина 6 яв.тяется неподвижно точкой оноры для рычаг а I 1 у|1рав,1ения.
В П1еках К) рычага 1 I управ, 1ения вы- но,тнены наз1,1 13, в которых с возможностью нереме1нения уста нов.лен нолзуп 8, соединенный тяюй 7 со сбегающей ) 3 TOj)MO3H(Mi ленты 2.
Пазы 13 вьпюлнены между неподвиж- Hoii onopoii, когорой является ось нроу1нииы (), и рычаюм 1 1 управления, а оси пазов 13 расположены naK/ioHtio под углом (i к линии, пернендику,1Я)П()11 к оси тяги. 11|)и ()м может Пьггь меньше или jiaBeH / , где / к(Г:|ф(|)ициенг трения в паре паз-по.1зун.
ычаг 1 I управления жестко соединеп со нн ками 10 и подпружинен пружиной 14, а упор 15 распо. южен с возможное I.K) ограничения хода pi)i4ara 1 1 управления и может бьггь сделан кч улируемым ю BiiicoTc для опеспечения регулировки гктеча и. Г е- гулн)()вка зазора между П1кивом I и т()|)- мо.зной .1ентой 2 осуществляется гайками 1Н.
.1енточны11 1()|п1оз )аботает с.лсдуюшим образом.
При п|1и.1ожении усилия Р к 1)ычагу 1 1 управления жесгко соединенные с ним ни ки 10 новорачиваются вокруг неподвижной опоры, которой является ось ripoyninnbi (i.
11оско. 1ьк пазы 13 выно.тпены между не- подвижно1 опорой, KOTOpoii является ось проун1ины В и рычаюм 1 1 управления, точки новерхности пазов 13 удаляются от вертикальной н.юскости, проходящей через ось iipoyiHHHiii f).
При перемещении управ.пяюшего рычага 1 I в паре , воз1П1кает cn.ia 1,
которая разлагается на нормальную силу, действующую в точке касания ползуна 8 со Н1екой 10, и силу /i пернендикулярную силе /г, обеснечиваюшую перемещение нолзуна 8. В процессе поворота шек 10 выполняется ус-ловие, чтобы tgp был больн1е коэф- ()иниента трения / в наре паз-ползун. По мере опускания управляюн1его рычага 1 1 yro.i наклона пазов 10 меняется и наступает момент, когда . Ползун 8 начинает перемешаться но назам 13, нлечо а умепьп1ается и выбирается зазор между тор- мозпой .лентой 2 IHKHBOM 1.
Пз формулы для определения управляю- Hiero усилия, необх(.)димого для создания достаточно -о тормозного момента;
Р
1- Г
где Р унрав.ляюпн е усилие;
/1 уси.лие, возникающее в сбегающей
ветви;
/ нлечо, на котором прилагается усилие Р;
|| КП/1, рычажной системы, с,ледует, что при уменьшении плеча ai, управ.ляк)Н1ее уси.лие Р уменьн1ается.
Такнм образо.м, вьпюлнение назов 13 в рычаге 11 управления позволяет изменять п.лечо а в сторону умень1пения при одновременном уменьшении хода рычага 11 управ.ления.
(л)хранян ход унрав.ляю1це1О рычага 11 в
преде.лах допустимых эргономических требований (400 450 мм), выполнением соот- ветсгвуюших пазов 13 можно довести плечо и до ну.ля, поско.льку осп 12, крс- nHHUie nieKH 10 )ычага 11, Biiino.Tiic- чы разде.льными и тяга 7 сможет пересечь ось неподвижно )i, которой
Я.ЯеТСЯ ось НрОуИ НЫ 6.
Формула и: о6ретени.ч
тормоз, СОДерЖапи Й КИВ,
охвать ваю пую его тормозную , ))ча унравле 1я со щеками, п арнирно соеди- с 11роуп иной 1абегаю цей ветв и (к редством со сбегаю цей ветвью тор- , неподвиж 1ую , распоЛ() с В ПеС )1 вел ви, и рас оложенные 1од к пазы, в которых с воз- мож1 остью 1 еремешения .ложе одп из , отличиющийся тем, что. с 1ельк)
у. : кс 1луатапионных качеств. азы .,| а цеках и расположен между точкой к()такта е одвижной с роу- ТОЧКОЙ соеди е ия ТЯГИ С рычагом у равления, а наклона аза выбран ПЗ , гдс Р - угол накло а осп аза к линии, перпендикулярной к ОС / коэффи трения.
Вид А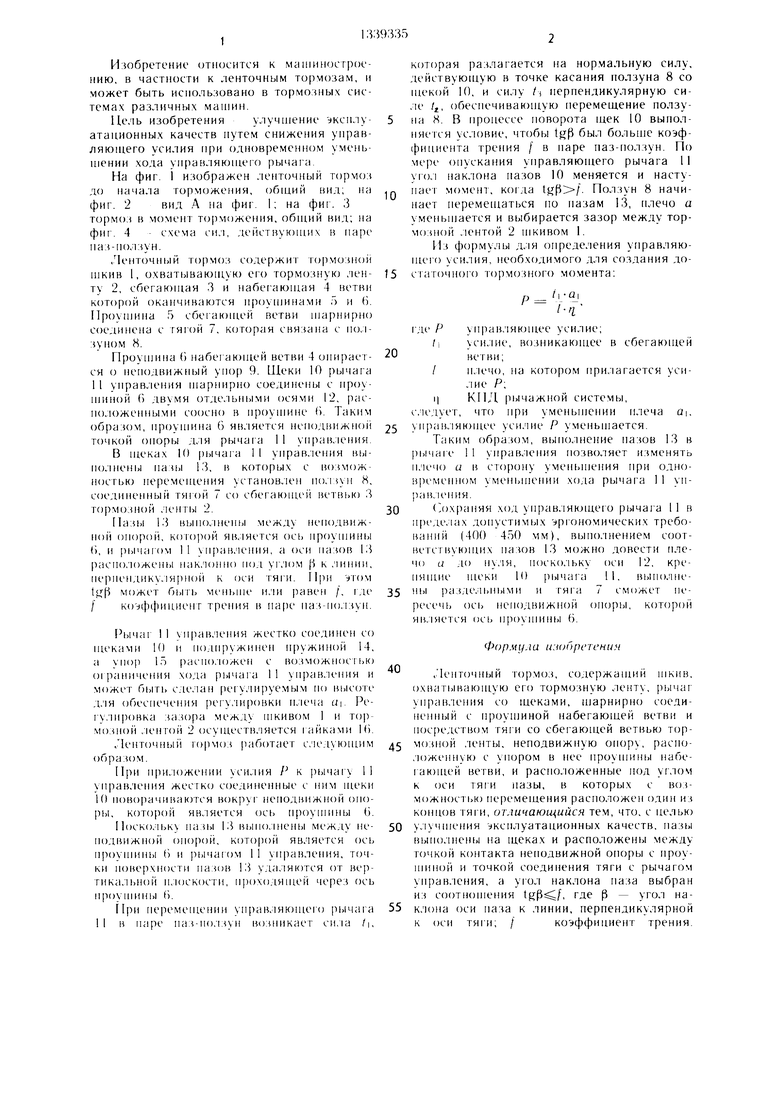
| название | год | авторы | номер документа |
|---|---|---|---|
| Ленточный тормоз | 1980 |
|
SU1040243A1 |
| Самоотцепляющееся захватное устройство | 1986 |
|
SU1379226A1 |
| Укрытие кузова транспортного средства для перевозки сыпучих грузов | 1986 |
|
SU1379157A2 |
| Автоматический регулятор зазора стояночного тормоза барабанного типа с внутренними колодками | 1981 |
|
SU947511A1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ЗАТЯЖКОЙ ЛЕНТОЧНО-КОЛОДОЧНОГО ТОРМОЗА | 2002 |
|
RU2224924C2 |
| Устройство для абразивной обработки отверстий | 1985 |
|
SU1296380A1 |
| Транспортное средство | 1977 |
|
SU671173A1 |
| Устройство натяжения провода | 1985 |
|
SU1312655A1 |
| Механизм управления тормозным устройством | 1986 |
|
SU1493822A1 |
| Устройство для прокладывания нити на плосковязальной машине | 1986 |
|
SU1379367A1 |
Изобретение относится к области машиностроения, в частности к ленточным тормозам, и может быть исиользовано в ixip мозных системах различных машин. Целью изобретения является улучшение эксплуатационных качеств путем снижения управ.чяю- Hiero усилия при одновременном уменьпю- нии хода управляющего рычага. Для этого в шеках 10, жестко соединенных с рычагом управления (РУ) 1 1, выполнены пазы (П) 13 между неподвижной опрой, которой является ось проун1ины 6, и РУ 11. П 13 выполнены наклонно к линии, перпендикулярной к оси тяги 7. Угол р наклона оси Г1 13 выбран из условия , где / - коэффициент трения ио.чзуца 8 о теки 10. При п()ил)жс- нии усилия к РУ 1 I происходит поворот щек 10 и перемещение ползуна 8 в П 13с уменьшением п,1еча а. 4 ил. J(Л со 00 (X) со оо 01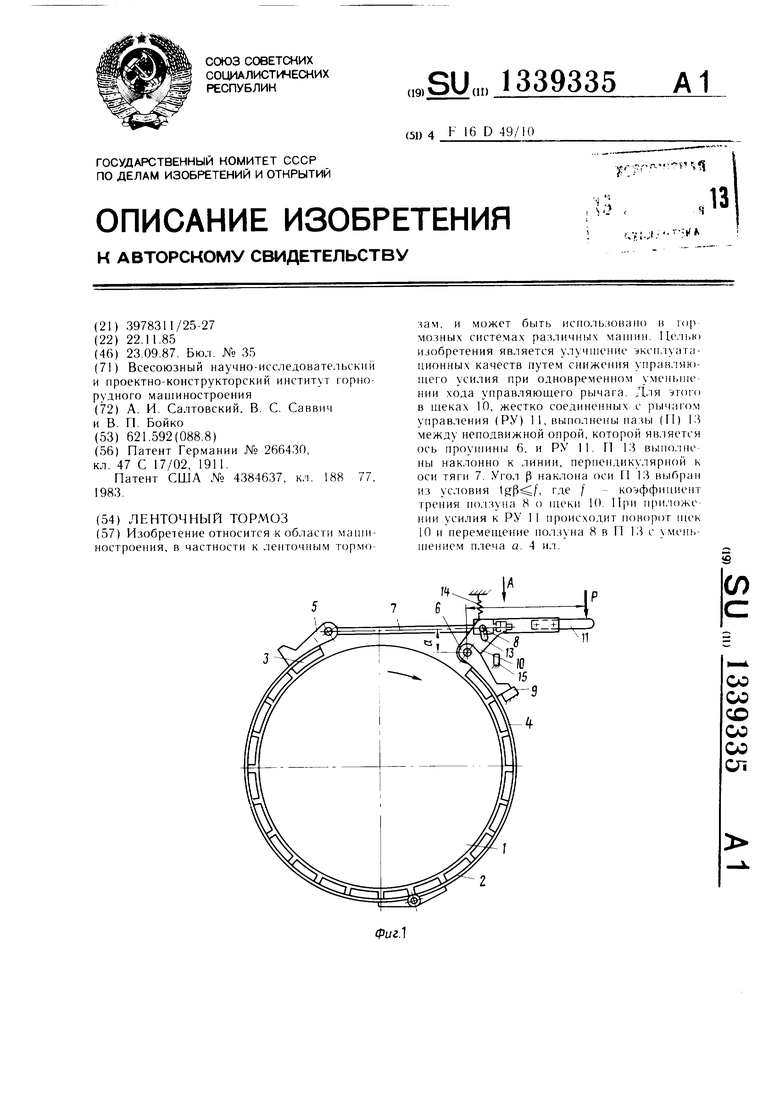
| ИЗМЕЛЬЧИТЕЛЬ КОРМОВ | 0 |
|
SU266430A1 |
| Способ очищения сернокислого глинозема от железа | 1920 |
|
SU47A1 |
| Патент США № 4384637, кл | |||
| Поршень для воздушных тормозов с сжатым воздухом | 1921 |
|
SU188A1 |
