2.Устройство по п. 1, отличающееся тем, что фильтр п-го порядка выполнен в виде последовательно соединенных элементарных звеньев первого н второго порядков, каждое из которых снабжено входом управления частотой среза, подключенным к выходу счетчика.
3.Устройство по п. 1, отличающееся тем, что широтно-импульсный преобразователь
Изобретение относится к сельскохозяйственному машиностроению, в частности к системам автоматического вождения сельскохозяйственных агрегатов при выполнении технологических процессов.
Цель изобретения - повышение точности и помехоустойчивости вождения в условиях широкого диапазона изменений входных воздействий.
На чертеже изображено предлагаемое устройство.
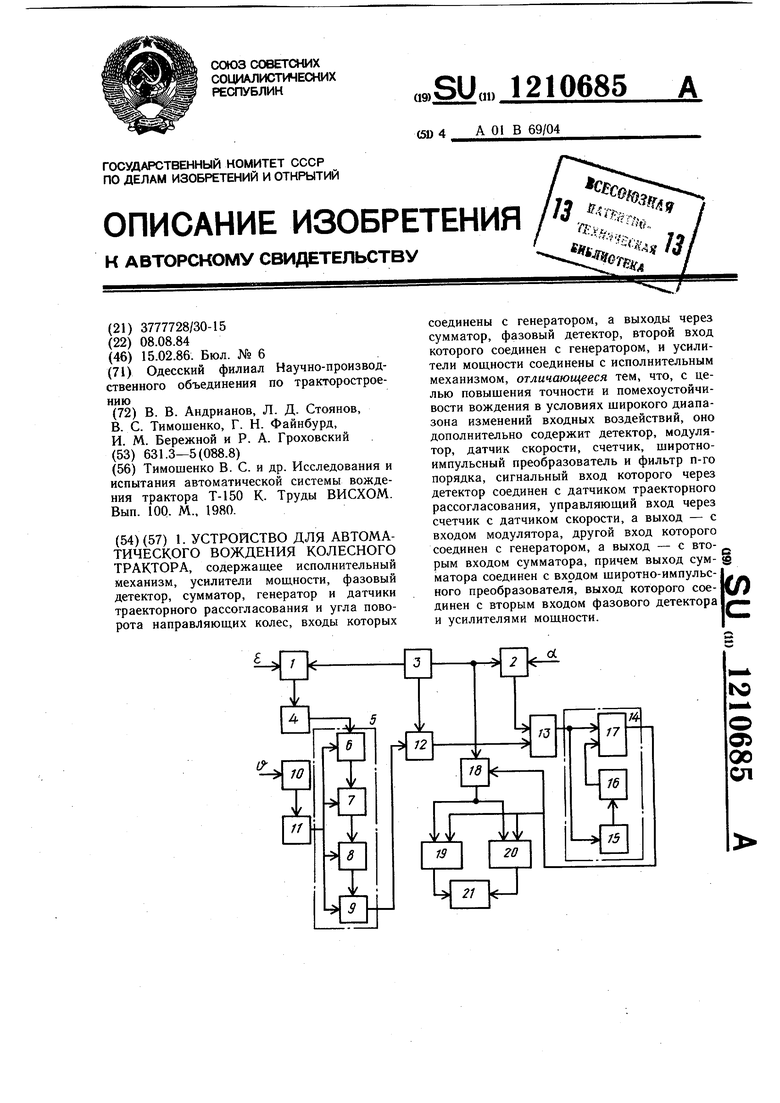
Устройство содержит датчик 1 траектор- ного рассогласования, датчик 2 угла поворота направляющих колес, генератор 3, детектор 4, фильтр 5, состоящий из элементарных звеньев 6-9, датчик 10 скорости, счетчик 11, модулятор 12, сумматор 13, широтно-импульсный преобразователь 14, содержащий устройство 15 синхронизации, генератор 16 пилообразного напряжения и компаратор 17, фазовый детектор 18, усилители 19 и 20 мощности и исполнительный механизм 21.
Устройство работает следующим образом.
Во время движения трактора (не показан) вдоль базовой линии сигнал датчика 1 траекторного рассогласования, запитывае- мого генератором 3, преобразуется детектором 4 и поступает на вход фильтра 5, состоящего из элементарных звеньев 6-9, первого и второго порядков. При минимальной скорости движения трактора исходное состояние счетчика 11, управляемого сигналом датчика 10 скорости, таково, что его выходной сигнал устанавливает частоту среза каждого из элементарных звеньев 6-9 фильтра 5 такой, что полоса пропускания фильтра 5 обеспечивает с одной стороны прохождение регулярной составляющей с минимальными фазовыми сдвигами, а с другой - нахожсодержит компаратор, устройство синхронизации и генератор пилообразного напряжения, вход которого через устройство синхронизации соединен с выходом сумматора, а выход - с неинвертирующим входом компаратора, инвертирующий вход которого соединен с выходом сумматора, а выход - с усилителями мощности и фазовым детектором.
дение максимума спектральной плотности помехи за пределами полосы пропускания фильтра 5. С увеличением скорости движения агрегата меняется состояние счетчика 11 и его выходной сигнал меняет параметры элементарных звеньев 6-9 фильтра 5, обеспечивая тем самым сдвиг граничной частоты среза фильтра 5 в сторону высоких частот. Выходной сигнал фильтра 5 через модулятор 12, на сигнальный вход которого поступает опорное напряжение генератора 3, поступает на вход сумматора 13 и складывается с сигналом датчика 2 угла поворота направляющих колес. При этом, если выходной сигнал сумматора 13, поступающий на инвертирующий вход компаратора 17, меньше опорного напряжения, определяющего зону нечувствительности системы на неинвертирующем входе, то выходной сигнал компаратора 17 равен нулю и на исполнительный механизм 21 сигнал через усилители 19 и 20 мощности не поступает.
При отклонении трактора от базовой линии под действием возмущающего момента
или помехи, действующей на датчик 1 траекторного рассогласования, сигнал на выходе сумматора 13 превышает зону нечувствительности компаратора 17. В этот момент срабатывает устройство 15 синхронизации, запуская генератор 16 пилообразного Напряжения, сигнал которого подается на иеинвертирующий вход компаратора 17. С выхода компаратора 17 сигнал, длительность которого определяется временем наступления равенства сигнала генератора 16 пилообразного напряжения и сигнала ошибки, поступает на первые входы усилителей 19 и 20 мощности исполнительного механизма 21. На вторые входы усилителей 19 и 20 мощности поступает сигнал фазы ошибки, определяемый фазовым детектором 18, сравнивающим фазы сигналов ошибки с выхода компаратора 17 и сигнал генератора 3, при
312106854
этом срабатывает один из усилителей (19Использование предлагаемого устройства или 20) мощности, вызывая через исполни-повышает качество вождения самоходного тельный механизм 21 поворот направляющихагрегата, а следовательно, и производитель- колес трактора в сторону ликвидации рас-ность выполнения сельскохозяйственных ра- согласования.бот.
| название | год | авторы | номер документа |
|---|---|---|---|
| Фотооптический датчик системы автоматического вождения мобильного агрегата | 1986 |
|
SU1423012A1 |
| Способ автоматического вождения колесного трактора и устройство для его осуществления | 1984 |
|
SU1311641A1 |
| Устройство автоматического вождения колесных тракторов | 1986 |
|
SU1440375A1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ УСКОРЕНИЙ | 2006 |
|
RU2325662C1 |
| Система автоматизированного вождения колесных машинно-тракторных агрегатов | 1981 |
|
SU1033033A1 |
| МИКРОВОЛНОВЫЙ ДЕТЕКТОР ЖИЗНИ | 1994 |
|
RU2097085C1 |
| МОНОИМПУЛЬСНАЯ РАДИОЛОКАЦИОННАЯ СИСТЕМА | 2000 |
|
RU2178896C1 |
| Следящая система | 1985 |
|
SU1290251A1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ УСКОРЕНИЙ | 2007 |
|
RU2329512C1 |
| КОГЕРЕНТНЫЙ ПРИЕМООТВЕТЧИК ФАЗОВОЙ СИНХРОНИЗАЦИИ | 2006 |
|
RU2319931C1 |
| Тимошенко В | |||
| С | |||
| и др | |||
| Деревянный коленчатый рычаг | 1919 |
|
SU150A1 |
| Труды ВИСХОМ | |||
| Вып | |||
| Облицовка комнатных печей | 1918 |
|
SU100A1 |
| М., 1980. | |||
