05
о сд
(Х
сд
00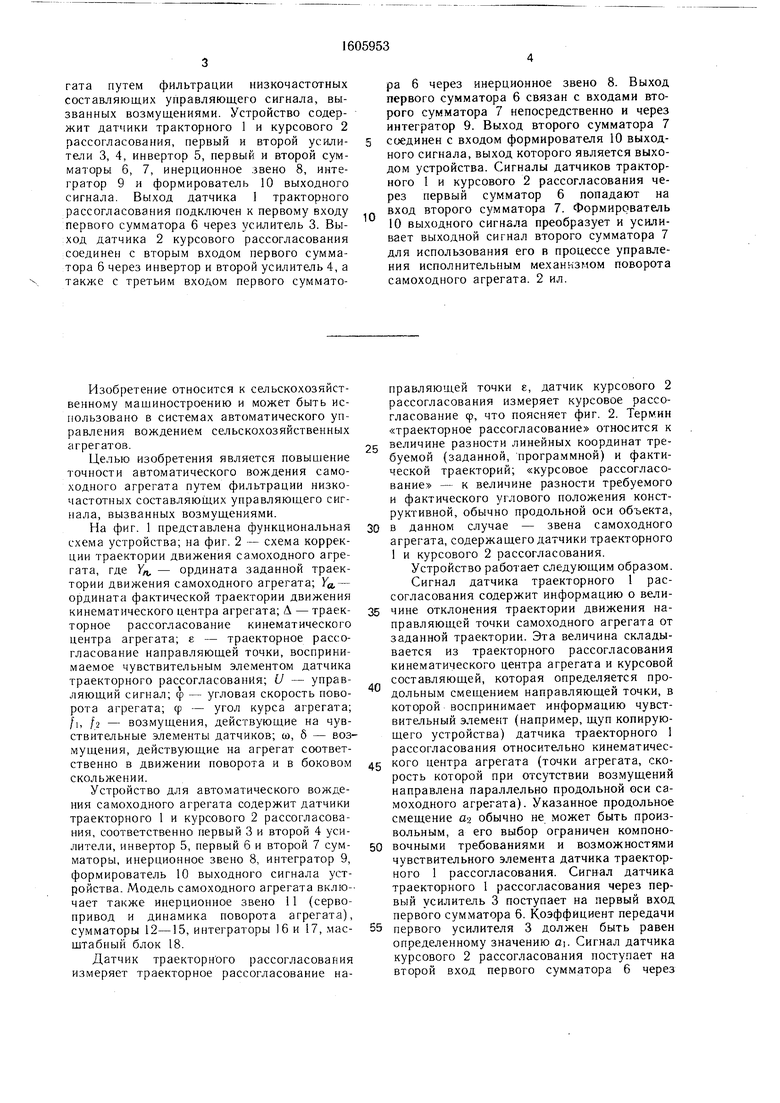
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для автоматического вождения мобильных агрегатов | 1984 |
|
SU1166690A1 |
| Устройство для управления движением трактора | 1980 |
|
SU1014489A1 |
| Фотооптический датчик системы автоматического вождения мобильного агрегата | 1986 |
|
SU1423012A1 |
| Устройство для управления движением самоходных агрегатов | 1980 |
|
SU941943A1 |
| Устройство для автоматического вождения самоходных агрегатов | 1981 |
|
SU1001879A1 |
| Устройство для оценки качества автовождения сельскохозяйственного агрегата | 1984 |
|
SU1186101A1 |
| Устройство для автоматического вождения колесного трактора | 1984 |
|
SU1210685A1 |
| Система автоматизированного вождения колесных машинно-тракторных агрегатов | 1981 |
|
SU1033033A1 |
| Способ автоматического вождения колесного трактора и устройство для его осуществления | 1984 |
|
SU1311641A1 |
| Способ местоопределения тракторного агрегата и устройство для осуществления | 2015 |
|
RU2607337C1 |
Изобретение касается сельского хозяйства, в частности сельскохозяйственного машиностроения, и может быть использовано в системах автоматического управления вождением сельскохозяйственных агрегатов. Цель изобретения - повышение точности автоматического вождения самоходного агрегата путем фильтрации низкочастотных составляющих управляющего сигнала, вызванных возмущениями. Устройство содержит датчики тракторного 1 и курсового 2 рассогласования, первый и второй усилители 3, 4, инвертор 5, первый и второй сумматоры 6, 7, инерционное звено 8, интегратор 9 и формирователь 10 выходного сигнала. Выход датчика 1 тракторного рассогласования подключен к первому входу первого сумматора 6 через усилитель 3. Выход датчика 2 курсового рассогласования соединен со вторым входом первого сумматора 6 через инвертор 5 и второй усилитель 4, а также с третьим входом первого сумматора 6 через инерционное звено 8. Выход первого сумматора 6 связан со входами второго сумматора 7 непосредственно и через интегратор 9. Выход второго сумматора 7 соединен со входом формирователя 10 выходного сигнала, выход которого является выходом устройства. Сигналы датчиков тракторного 1 и курсового 2 рассогласования через первый сумматор 6 попадают на вход второго сумматора 7. Формирователь 10 выходного сигнала преобразует и усиливает выходной сигнал второго сумматора 7 для использования его в процессе управления исполнительным механизмом поворота самоходного агрегата. 2 ил.
Фиг л
гата путем фильтрации низкочастотных составляющих управляющего сигнала, вызванных возмущениями. Устройство содержит датчики тракторного 1 и курсового 2 рассогласования, первый и второй усили- тати 3, 4, инвертор 5, первый и второй сумматоры 6, 7, инерционное звено 8, интегратор 9 и формирователь 10 выходного сигнала. Выход датчика I тракторного рассогласования подключен к первому входу первого сумматора 6 через усилитель 3. Выход датчика 2 курсового рассогласования соединен с вторым входом первого сумматора 6 через инвертор и второй усилитель 4, а также с третьим входом первого сумматоИзобретение относится к сельскохозяйственному машиностроению и может быть использовано в системах автоматического управления вождением сельскохозяйственных агрегатов.
Целью изобретения является повышение точности автоматического вождения самоходного агрегата путем фильтрации низкочастотных составляюишх управляющего сигнала, вызванных возмущениями.
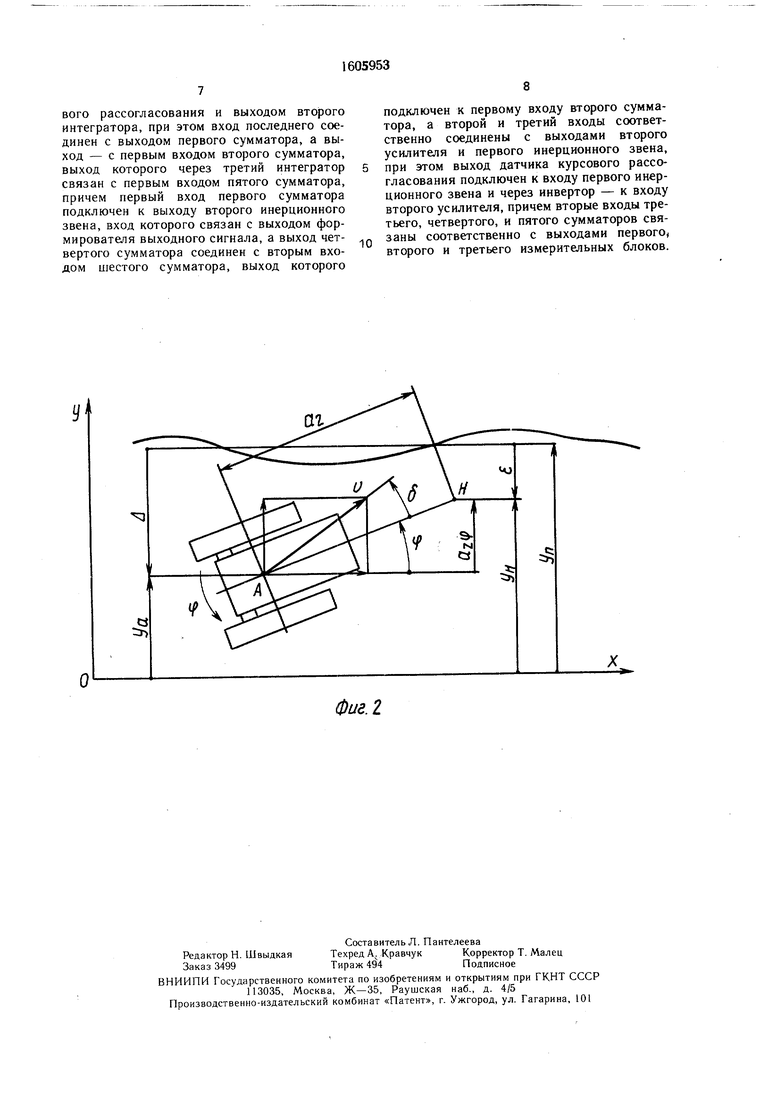
На фиг. 1 представлена функциональная схема устройства; на фиг. 2 - схема коррекции траектории движения самоходного агрегата, где y/t - ордината заданной траектории движения самоходного агрегата; Уд,- ордината фактической траектории движения кинематического центра агрегата; А - траек- торное рассогласование кинематического центра агрегата; е - траекторное рассогласование направляющей точки, воспринимаемое чувствительным элементом датчика траекторного рассогласования; U - управляющий сигнал; ф - угловая скорость поворота агрегата; ф - угол курса агрегата; /1, /2 - возмущения, действующие на чувствительные элементы датчиков; ш, б - возмущения, действующие на агрегат соответственно в движении поворота и в боковом скольжении.
Устройство для автоматического вождения самоходного агрегата содержит датчики траекторного 1 и курсового 2 рассогласования, соответственно первый 3 и второй 4 усилители, инвертор 5, первый 6 и второй 7 сумматоры, инерционное звено 8, интегратор 9, формирователь 10 выходного сигнала устройства. Модель самоходного агрегата вклю-- чает также инерционное звено 11 (сервопривод и динамика поворота агрегата), сумматоры 12-15, интеграторы 16 и 17, масштабный блок 18.
Датчик траекторн ого рассогласования измеряет траекторное рассогласование нара б через инерционное звено 8. Выход первого сумматора 6 связан с входами второго сумматора 7 непосредственно и через интегратор 9. Выход второго сумматора 7 соединен с входом формирователя 10 выходного сигнала, выход которого является выходом устройства. Сигналы датчиков тракторного 1 и курсового 2 рассогласования через первый сумматор 6 попадают на вход второго сумматора 7. Формирователь 10 выходного сигнала преобразует и усиливает выходной сигнал второго сумматора 7 для использования его в процессе управления исполнительным механизмом поворота самоходного агрегата. 2 ил.
правляющей точки е, датчик курсового 2 рассогласования измеряет курсовое рассогласование ср, что поясняет фиг. 2. Термин «траекторное рассогласование относится к
величине разности линейных координат требуемой (заданной, программной) и фактической траекторий; «курсовое рассогласование - к величине разности требуемого и фактического углового положения конструктивной, обычно продольной оси объекта,
в данном случае - звена самоходного агрегата, содержащего датчики траекторного 1 и курсового 2 рассогласования.
Устройство работает следующим образом. Сигнал датчика траекторного 1 рассогласования содержит информацию о величине отклонения траектории движения направляющей точки самоходного агрегата от заданной траектории. Эта величина складывается из траекторного рассогласования кинематического центра агрегата и курсовой составляющей, которая определяется продольным смещением направляющей точки, в которой воспринимает информацию чувствительный элемент (например, щуп копирующего устройства) датчика траекторного 1 рассогласования относительно кинематического центра агрегата (точки агрегата, скорость которой при отсутствии возмущений направлена параллельно продольной оси самоходного агрегата). Указанное продольное смещение са обычно не может быть произвольным, а его выбор ограничен компоновочными требованиями и возможностями чувствительного элемента датчика траекторного 1 рассогласования. Сигнал датчика траекторного 1 рассогласования через первый усилитель 3 поступает на первый вход первого сумматора 6. Коэффициент передачи
первого усилителя 3 должен быть равен определенному значению Оь Сигнал датчика курсового 2 рассогласования поступает на второй вход первого сумматора 6 через
второй усилитель 4 и инвертор 5, а на третий вход первого сумматора 6 - через инерционное звено 8. Коэффициент передачи второго усилителя 4 должен быть равен зна- чениюа (аз-02) .коэффициент передачи инерционного звена 8 - величине . Постоянная времени инерционного звена 8 должна составлять также определенное значение Т. Сигнал с выхода первого сумматора 6 передается на первый вход второго сумматора 7 непосредственно, а на его второй вход - через интегратор 9. Коэффициент передачи интегратора 9 равен значению 1/Т. С выхода второго сумматора 7 сигнал поступает на вход формирователя 10 управляющего сиг- нала, выход которого является выходом устройства. Формирователь 10 преобразует и усиливает выходной сигнал для использования его в исполнительном механизме поворота самоходного агрегата и представляет собой обычно широтно-импульсный модулятор либо пропорциональный усилитель в зависимости от вида исполнительного механизма и механизма поворота агрегата.
Управляющее воздействие U в виде, например, перемещения штока гидропривода преобразуется в изменение состояния механизмов поворота агрегата, например отключение муфты поворота гусеничного трактора. Согласно законам динамики меняется распределение сил, действующих на агрегат, и он входит в поворот, т. е. появляется угловая скорость поворота ф. Она может быть вызвана и возмущающими силами (от рельефа, почвы), т. е. О). Этот процесс описывается инерционным звеном 1 и сумматором 12.
Коэффициент передачи инерционного звена 11 самоходного агрегата обозначим,Л, постоянную времени этого звена Т, коэффициент передачи интегратора 17 равен скорости движения V агрегата, масщтаб- ного блока 18 - а2, коэффициенты передачи остальных звеньев и блоков равны единице. Анализ статической динамики системы показывает; что оптимальные значения параметров устройства находятся в диапазонах
(10...20)Г,
(1)
f2)
(3)
Изменение угла курса ф агрегата является результатом интегрирования угловой скорости ф, что описывается интегратором 16. Направление движения агрегата определяется суммированием угла курса ф и угла бокового скольжения или сноса 8, что учитывается сумматором 13. В результате интегрирования боковой составляющей скорости движения агрегата в интеграторе 17 получаем координату УО кинематического центра агрегата. Алгебраически суммируя в сумматоре 14 координату Уа с координатой Уп. программной траектории, получаем траектор- мое рассогласование Д кинематического
0
5
0
5
0
5
0
5
0
5
центра 7, а в сумматоре 15 суммируя с величиной а2ф, моделируемой масштабным блоком 18 - траекторное рассогласование е направляющей точки.
При выполнении соотношений (1), (2), (3) и значений параметров связь, реализуемая масштабным блоком 18, компенсируется в связи с тем, что параметр а2 обусловлен конструкцией и не является оптимальным и устройство реализует отрицательную обратную связь по курсу с передаточной функцией реального дифференцирующего звена
),
где Р - оператор дифференцирования. Совместно с интегратором 9 указанное звено обеспечивает астатизм устройства и позволяет компенсировать влияние низких частот, преобладающих в возмущениях.
В вариантах выполнения устройство для колесных самоходных агрегатов с поворотными колесами или шарнирной рамой может содержать внутреннюю обратную связь по углу поворота колес, реализуемую датчиком угла поворота колес, сигнал которого через усилитель и инвертор должен подаваться на второй сумматор 7. Датчики траекторного 1 и курсового 2 рассогласования могут иметь различные исполнения: механическое, оптическое, а датчик курсового 2 рассогласования может быть выполнен на основе курсового гироскопа.
Устройство благодаря фильтрации низких частот позволяет существенно повысить точность автоматического вождения самоходных сельскохозяйственных агрегатов.
Формула изобретения
Устройство для автоматического вождения самоходного агрегата, содержащее датчики траекторного и курсового рассогласования, первый и второй интеграторы, первый и второй сумматоры, выход последнего из которых связан с входом формирователя выходного сигнала, а первый и второй входы подключены соответственно к входу и выходу первого интегратора, при этом выход формирователя выходного сигнала является выходом устройства, отличающееся тем, что, с целью повышения точности автоматического вождения самоходного агрегата путем фильтрации низкочастотных составляющих управляющего сигнала, вызванных возмущениями, оно снабжено инвертором, первым инерционным звеном, двумя усилителями и моделью самоходного агрегата, включающей три измеритыьных блока, второе инерционное звено, третий интегратор, третий, четвертый, пятый, щестой сумматоры и масштабный блок, выход которого связан с первым входом шестого сумматора, а вход - с входом датчика курсового рассогласования и выходом второго интегратора, при этом вход последнего сж- динен с выходом первого сумматора, а выход - с первым входом второго сумматора, выход которого через третий интегратор связан с первым входом пятого сумматора, причем первый вход первого сумматора подключен к выходу второго инерционного звена, вход которого связан с выходом формирователя выходного сигнала, а выход четвертого сумматора соединен с вторым входом шестого сумматора, выход которого
Фиг. 2
0
подключен к первому входу второго сумматора, а второй и третий входы соответственно соединены с выходами второго усилителя и первого инерционного звена, при этом выход датчика курсового рассогласования подключен к входу первого инерционного звена и через инвертор - к входу второго усилителя, причем вторые входы третьего, четвертого, и пятого сумматоров связаны соответственно с выходами первого, второго и третьего измерительных блоков.
| Устройство для автоматического вождения тракторных агрегатов | 1977 |
|
SU625650A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
