Изобретение относится к сельскохозяйственному машиностроению, в частности к конструкции устройств для автоматического вождения мобиль ных агрегатов. Цель изобретения - повьшение качества автоматического волщения. На чертеже изображена функционал ная схема устройства Устройство содержит последовательно соединенные тракторный датчик 1, модель 2 агрегата, сумматор преобразователь 4 сигнала и исполни тельный механизм 5 поворота агрегат выход которого соединен с первым входом модели 2 агрегата, при этом модель 2 агрегата снабжена двумя инерционными звеньями 6 и 7, тремя интеграторами 8-10 иблоком 11 срав нения. Первый вход инерционного зве на 6 соединен с четвертьгм входом сумматора 3 и выходом исполнительно го механизма 5 поворота агрегата, второй его вход соединен с выходом блока 11 сравнения,- входом второго Инерционного звена 7, вторыми входа ми первого 8 и второго 9 интеграторов и входом третьего 10 интегратора, а третий вход соединен с выходо третьего интегратора 10 и пятым вхо дом сумматора 3. Выход первого инер ционного звена 6 соединен с первым входом первого интегратора 8, четве тым входом .блока 11 сравнения и тре тьим входом сумматора 3, выход первого интегратора 8 соединен с первы входом второго интегратора 9, третьим входом блока 11 сравнения и вт рым входом сумматора 3, выход второ го интегратора 9 соединен с вторым входом блока 11 сравнения и первым входом сумматора 3, а выход второго инерционного звена 7 соединен с пятым входом блока 11 сравнения. Выход тракторного датчика 1 соединен с первым входом блока 11 сравнения. Устройствоработает следующим , образом. Поскольку структура модели 2 агр гата соответствует структуре реального агрегата, как объекта управления движением, а на первьй вход модепи2 агрегата подается сигнал с выхода исполнительного механизма 5 поворота агрегата, соответствующий реальному управляющему воздействию на агрегат, то выходные сигналы модели 2 должны соответствовать 02 координатам состояния мобильного агрегата, а именно:выходной Сигнал интегратора 9 - траекторному отклонению кинематического центра агрегата, выходной сигнал интегратора 8 его производной (курсовому углу), выходной сигнал инерционного звена 6 - угловой скорости отклонения агрегата от задающей траектории. Сумма этих сигналов образует оценку отклонения тракторного датчика 1 от задающей траектории, а сигнал разности между этой оценкой и реальным измерением датчика 1 получается на выходе блока 11 сравнения за счет подачи сигнала датчика 1 ссоответствующим знаком. Отсюда ясно, что при точном движении агрегата по задающей траектории сигнал на выходе блока 11 сравнения должен быть нулевым. Если это не так (например, изза возмущений, которые действуют на. агрегат, а на модель 2 не действуют; не точного совпадения параметров модели 2 и агрегата, щумов измерений и т.д.), то на выходе блока 11 сравнения появится ненулевой сигнал ошибки, корректирующий вторые входы каждого из блоков модели 2 так, что сигналы с выходом модели 2 агрегата будут изменяться в сторону уменьшения сигнала ошибки и таким образом будут непрерывно отслеживать действительные координаты состояния агрегата. Принципиальным отличием предлагаемой модели 2 агрегата от известных обусловливающим ее свойства, является наличие второго входа модели 2 к замыкание внутренней отрицательной обратной связи по разности координат фактического и восстановленного в модели 2 состояния агрегата. Работу модели 2 можно формально описать следукядей системой дифференциальных уравнений: . ,iiUk,elt); x,ii)k,ectV, x,()k,e(t); (,xAtHh b(t)fh,W) где x,(t), Xj(t), x(t) и (t) выходные сигналы блоков 9,8,6 и 11
модели 2 агрегата соответственно, x(t) и y(t) - входные сигналы от исполнительного механизма 5 поворота и от тракторного датчика 1 соответственно, Т и К - постоянная времени и коэффиципнт передачи блoka6, соответствующие аналогичным параметhj, hj рам реального агрегата, Ь весовые коэффициенты на втором, третьем и четвертом входах блока 11 сравнения, определяемые местом расположения тракторного датчика t на агрегате, k,, kj, k - расчетные коэффициентрл, определяемые по известной методике.
. Выходные сигнйлы модели 2 и исполнительного механизма 5 поворота поступают на сумматор 3, выходной сигнал которого можно записать следунщим образом:
U(t) x.(t) + IjX (tj l,x,(t) , J (t} где 1,, 1, Iq, 14
:j, 14 - расчетные весовые коэффициенты на соответствующих входах сумматора 3, определяемые по известной методике„
Управляющий сигнал с :выхода сумматора 3, через преобразователь 4 сигнала подается на исполнительный механизм 5 поворота агрегата, что и обеспечивает замыкание основного контура управления.
Таким образом, работоспособность устройства обеспечивается сигналами от модели 2 агрегата и не зависит от выноса тракторного датчика 1 относительно кинематического центра мо-бнльногр агрегата. Более того, оптимизация параметров К,, К, К модели 2 агрегата на основе известных методов теории оптимального управления позволяет получить наилучшее в среднеквадратическом смысле сле:жения выходных сигналов модели за действительными координатами состояния агрегата, а оптимизация параметров 1,, 1, 1,14 сформировать Iсигнал управления Цинимизирующий ;траекторную ошибку вождения агрега1та при заданной интенсивности управ ляющих воздействий.
При наличии в устройстве интегра тора 10 оно работает следующим образом. Постоянные или медленно меняющиеся возмущения, вызванные асимметрией условий поворота мобильного агрегата вправо и влево, приводят к уводу агрегата от задающей траектории. Вследствие этого в сигнале ошибки, снимаемом с блока 11 срав нения модели 2 агрегата появляется соответствующая составляющая. Интегратор 10, на вход которого подается сигнал ошибки с блока 11, формирует оценку возмущения. Выходной сигнал 5 интегратора 10 подается на третий вход инерционного звена 6 (как и реальное возмущение на агрегат) и на пятый вход сумматора 3. Здесь формируется дополнительная составляющая управляющего сигнала, пропорциональная возмущению, которая в сумме с основным управлякицим сигналом обеспечивает компенсацию постоянных или медленно менянщихся возмущений и вызванного ими увода агрегата от задающей траектории.
При наличии в устройстве инерционного звена 7 оно работает следукнцим образом. Вождение агрегата по зависимым задающим траекториям обычно приводит к накоплению искривлений, так как при каждом последующем проходе задающая траектория все больше . отличается от исходной за счет оши- 5 бок слежения. Дополнительное инерционное звено 7, постоянная времени которого соответствует постоянной времени реальной замкнутой системы автоматического вождения при подаче 0 на его вход сигнала ошибки с выхода блока 11 сравнения, дает оценку задающей траектории. Сигнал с выхода инерционного звена 7 подается- на пятый вход блока 11 сравнения, вследj ствие чего происходит компенсация составляющей от задающей траектории в сигнале ошибки, снимаемом с блока 1 1 сравнения. За счет этого исклю-. чается накопление искривлений, обусQ ловленных неидеальностью задающих траекторий.
Т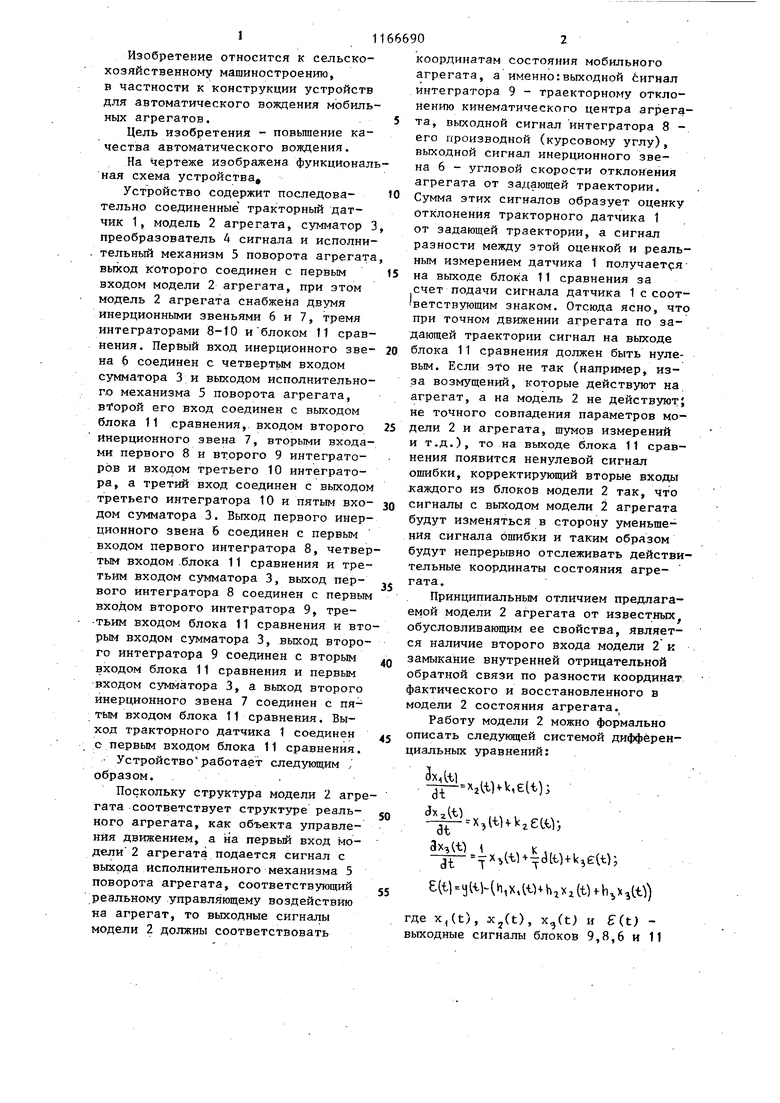
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для автоматического вождения самоходного агрегата | 1988 |
|
SU1605953A1 |
| Устройство для автоматического вождения самоходных агрегатов | 1981 |
|
SU1001879A1 |
| Система регулирования объекта с запаздыванием | 1986 |
|
SU1397875A1 |
| Адаптивный прогнозирующий регулятор | 1982 |
|
SU1123020A1 |
| СПОСОБ УПРАВЛЕНИЯ ДВИЖЕНИЕМ СУДНА С КОМПЕНСАЦИЕЙ МЕДЛЕННО МЕНЯЮЩИХСЯ ВНЕШНИХ ВОЗМУЩЕНИЙ И СИСТЕМА УПРАВЛЕНИЯ ДВИЖЕНИЕМ СУДНА С КОМПЕНСАЦИЕЙ МЕДЛЕННО МЕНЯЮЩИХСЯ ВНЕШНИХ ВОЗМУЩЕНИЙ | 2014 |
|
RU2564786C1 |
| Система управления | 1985 |
|
SU1285430A1 |
| Устройство для автоматического вождения самоходных агрегатов | 1985 |
|
SU1336964A1 |
| Прогнозирующий регулятор с переменной структурой | 1981 |
|
SU980068A1 |
| Устройство для стабилизации положения плазменного шнура в токамаке | 1986 |
|
SU1418817A1 |
| Система автоматизированного вождения колесных машинно-тракторных агрегатов | 1981 |
|
SU1033033A1 |
УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОГО ВОЖДЕНИЯ МОиИЛЬНЫХ АГРЕГАТОВ, содержащее соединенные последовательно тракторный датчик, сумматор, преобразователь сигнала управления и исполнительный механизм поворота агрегата, выход которого соединен с вторым входом сумматора через модель агрегата, отличающ ее с я тем, что, с целью повышения качества автоматического вождения, модель агрегата включена последовательно между тракторным датчиком и сумматором и снабжена двумя инер- . ционными звеньями, тремя интеграторами и блоком сравнения, при этом первьй вход первого инерционного звена соединен с четвертым входом сумматора и выходом исполнительного механизма поворота агрегата, второй его вход соединен с выходом блока сравнения, входом второго инерционного звена, вторыми входами первого и второго интеграторов и входом третьего интегратора, а третий вход соединен с выходом третьего интегратора и пятым входом сумматора, причем выход первого инерционного звена соединен с первым входом, первого интегратора, четвертым входом блока сравнения и третьим входом сумматора, выход пер(Л вого интегратора соединен с первым входом второго интегратора, третьим входом блока сравнения и вторым входом сумматора, выход второго интегратора соединен с вторым входом блока сравнения и первым входом сумматора, а выход второго инерционного звена соединен с пятым входом блока Од Од сравнения, одновременно выход тракторного датчика соединен с первьй CD со входом блока сравнения.
| Авторское свидетельство СССР 10011879, кл | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
