/ V
3
СО О
00 00
со
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для автоматического вождения самоходного агрегата | 1988 |
|
SU1605953A1 |
| Устройство для автоматического вождения самоходных агрегатов | 1985 |
|
SU1336964A1 |
| Устройство для автоматического вождения самоходных агрегатов | 1981 |
|
SU1001879A1 |
| ОРОСИТЕЛЬНЫЙ ТРУБОПРОВОД СИСТЕМЫ КАПЕЛЬНОГО ОРОШЕНИЯ, СПОСОБ ВОЖДЕНИЯ СЕЛЬСКОХОЗЯЙСТВЕННОГО АГРЕГАТА НА ПОСАДКАХ ПРИ КАПЕЛЬНОМ ОРОШЕНИИ И СИСТЕМА ДЛЯ АВТОМАТИЧЕСКОГО ВОЖДЕНИЯ СЕЛЬСКОХОЗЯЙСТВЕННОГО АГРЕГАТА | 2004 |
|
RU2275016C1 |
| УСТРОЙСТВО для АВТОМАТИЧЕСКОГО НАПРАВЛЕНИЯ | 1971 |
|
SU320253A1 |
| Устройство для автоматического вождения самоходных агрегатов | 1972 |
|
SU436630A1 |
| Устройство для автоматического вождения колесного трактора | 1984 |
|
SU1210685A1 |
| Авторулевой | 1988 |
|
SU1625780A1 |
| Система группового управления самоходными агрегатами | 1982 |
|
SU1061716A2 |
| Устройство для управления движением самоходных агрегатов | 1980 |
|
SU941943A1 |
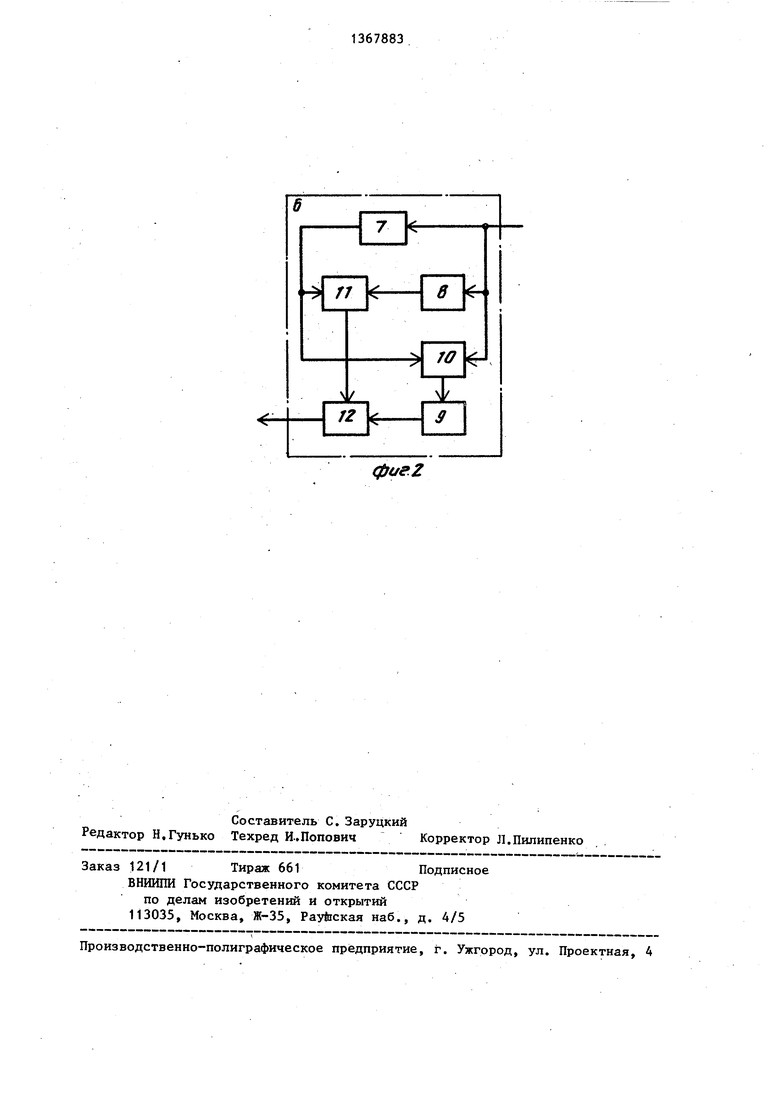
Изобретение относится к сельскохозяйственному машиностроению. Цель изобретения - повышение качества вождения. Устройство содержит чувствительный элемент 1, сумматор 2 сигналов, преобразователь сигнала с исполнительным механизмом 3, самоходный агрегат 4, аналог 5 самоходного агрегата и элемент 6 прогноза. Элемент 6 прогноза включает .апериодическое звено, два усилителя и три сумматора. Сигнал с выхода элемента 6 прогноза пропорционален сигналу, соответствующему курсу.агрегата 4 в будущий, наперед .заданный момент времени. Это реализовано за счет использования информации о значении производной и скорости -изменения курса агрегата 4 в каждый момент времени. 2 ил. i (О
г./
Изобретение относится к сельскохозяйственному машиностроению, в частности к устройствам автоматического вождения.самоходных агрегатов.
Цель изобретения - повышение качества вождения.
На фиг. 1 и 2 приведены соответственно структурные схемы предлагаемого устройства и элемента прогноза.
Устройство содержит чувствитель- ньй элемент 1, сумматор 2 сигналов, исполнительный механизм 3, самоходный агрегат 4, аналог 5 самоходного агрегата и элемент 6 прогноза.
Выход чувствительного элемента 1 соединен с первым входом сумматора 2 сигналов, выход которого через исполнительный механизм 3 воздействует на самоходный агрегат 4. Кроме того, выход исполнительного механизма 3 через аналог 5 самоходного агрегата и элемент 6 прогноза соединен с вторым входом сумматора 2 сигналов, а самоходный агрегат А соединен с чувствительным элементом 1 обратной связью. .
В качестве чувствительного элемента 1 может быть использовано механическое копирующее устройство, в котором источником информации .лу- жит, например, вращающийся трансформатор, сумматор 2 сигналов может быть выполнен на резисторах .в качестве
а выход - с выходом элемента 6 про- . гноза.
В качестве элемента 7 может быть
с использовано апериодическое звено, о
выполненное на резисторах и емкостя
усилители 8 и 9 могут быть выполнен на интегральных микросхемах, суммат ры 10, 11 и 12 - на резисторах.
10 Устройство работает следующим образом.
При движении агрегата 4 на выход исполнительного механизма 3 появляе ся управляющее воздействие, которое
15 обеспечивает поворот самоходного аг гата 4 в заданном направлении, изменяя траекторию движения копирующе точки, приближая ее к заданной трае тории.
20 На выходе аналога 5 самоходного агпегата появляется сигнал, пропорциональный значению курса агрегата в данный момент времени. При поступ лении этого сигнала на элемент 6
25 прогноза сигнал на его выходе пропорционален прогнозируемому курсу а регата 4 в будущий, наперед заданный момент времени.
Система автоматического вождения
30 осуществляет вождение агрегата 4 по траектории равенства нулю управляющ го воздействия, т.е. сигнала на вых де исполнительного механизма 3. Использование информации как о прогно
элемента 3 может быть применен щирот- -jg зируемом курсе агрегата 4, так и о
но-импульсный преобразователь, самоходный агрегат 4, например, - на базе трактора Т-150К, электронньй аналог 5 самоходного агрегата выполнен на интегральных микросхемах. 40
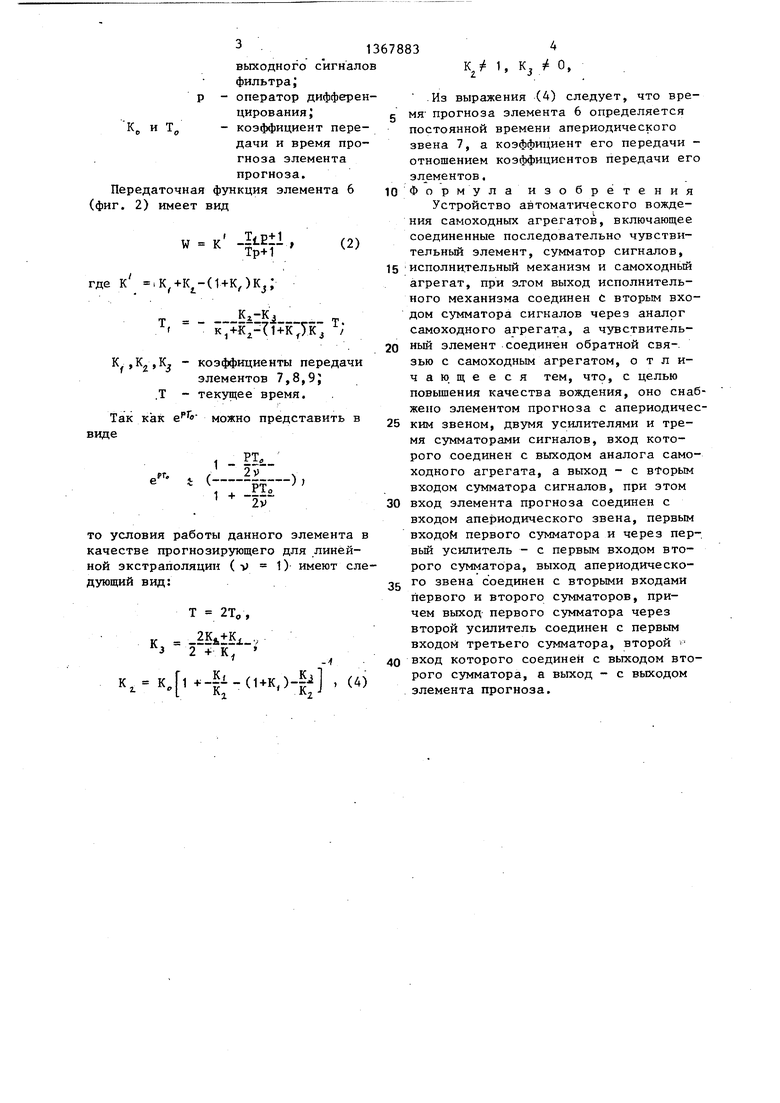
Элемент 6 прогноза выполнен по схеме экспоненциального сглаживания, например по схеме- линейной интерполяции. Он содержит апериодическое звено 7, два усилителя 8 и 9 и три сум- 45 матора 10-12.
его производной повышает качество в дения за счет того, что в управляющем .воздействии имеется информация о скорости изменения курса агрегата
Элемент 6 прогноза обеспечивает йведение в закон управления информа ции о значении производной прогнози руемого курса агрегата 4.
Структурная схема элемента 6 выполнена по схеме экспоненциального сглаживания (фиг. 2).
Ьыход элемента 6 прогноза соединен с входом апериодического звена 7, первым входом первого сумматора 10 и через первьш усилитель 8 с первым входом второго сумматора 11. -Выход апериодического звена 7 соединен с вторыми входами первого 10 и второго 11 сумматоров, причем выход первого сумматора 10 через второй усилитель 9 соединен с первым входом третьего сумматора 12, второй вход которого соединен с выходом второго сумматора 11,
/
а выход - с выходом элемента 6 про- гноза.
В качестве элемента 7 может быть
использовано апериодическое звено,
выполненное на резисторах и емкостях
усилители 8 и 9 могут быть выполнены на интегральных микросхемах, сумматоры 10, 11 и 12 - на резисторах.
Устройство работает следующим образом.
При движении агрегата 4 на выходе исполнительного механизма 3 появляется управляющее воздействие, которое
обеспечивает поворот самоходного агрегата 4 в заданном направлении, изменяя траекторию движения копирующей точки, приближая ее к заданной траектории.
На выходе аналога 5 самоходного агпегата появляется сигнал, пропорциональный значению курса агрегата 4 в данный момент времени. При поступлении этого сигнала на элемент 6
прогноза сигнал на его выходе пропорционален прогнозируемому курсу агрегата 4 в будущий, наперед заданный момент времени.
Система автоматического вождения
осуществляет вождение агрегата 4 по траектории равенства нулю управляющего воздействия, т.е. сигнала на выходе исполнительного механизма 3. Использование информации как о прогно0
5
0
его производной повышает качество вождения за счет того, что в управляющем .воздействии имеется информация о скорости изменения курса агрегата.
Элемент 6 прогноза обеспечивает - йведение в закон управления информации о значении производной прогнозируемого курса агрегата 4.
Структурная схема элемента 6 выполнена по схеме экспоненциального сглаживания (фиг. 2).
Пусть X(t) и X(t) соответственно входной и выходной сигналы элемента 6.
. Для того, чтобы данньй элемент был прогнозирующим, необходимо, чтд,- бы его передаточная функция описывалась выражением .
w М к е о Х(р)
РТ
(1)
где Х(р) и Х(р) - соответственно
изображения по Лапласу входного и
1367883
выходного сигналов фильтра i
р - оператор дифференцирования; с Кр и Тр - коэффициент передачи и время прогноза элемента прогноза.
Передаточная функция элемента 6 ю иг. 2) имеет вид
мя по зв от эл
Ф ни со те ис аг но до са ны
W к -|К1 , где к (1+K,)
(2)
Т.
KI-K
к +к -Т1+к Тк
коэффициенты передачи элементов 7,8,9j текущее время.
Так как иде
„f.
можно представить в
РТ 2
РТо
2v
1 L -o
п ,
1 + -
то условия работы данного элемента в качестве прогнозирующего для линейной экстраполяции дующий вид:
( V 1 ) имеют слеК,
Т 2То ,
2Kj,+Kj , 2 1КТ
- ч:-|1-(НК,)-| , (А)
1,
К.
4 О,
с
5
0
5
0
5
0
.Из выражения (4) следует, что время- прогноза элемента 6 определяется постоянной времени апериодического звена 7, а коэффшщент его передачи - отношением коэффициентов передачи его эл ементов.
Фор м у ла изобретения Устройство автоматического вождения самоходных агрегатов, включающее соединенные последовательно чувствительный элемент, сумматор сигналов, исполнительный механизм и самоходный агрегат, при э.том выход исполнительного механизма соединен с вторым входом сумматора сигналов через аналог самоходного агрегата, а чувствительный элемент соединен обратной свяагрегатом, о т л изью с самоходным чающееся
тем.
что.
целью
повышения качества вождения, оно снабжено элементом прогноза с апериодическим звеном, двумя усилителями и тремя сумматорами сигналов, вход которого соединен с выходом аналога самоходного агрегата, а выход - с вторым входом сумматора сигналов, при этом вход элемента прогноза соединен с входом апериодического звена, первьм входом первого сумматора и через пер- вьй усилитель - с первым входом второго сумматора, выход апериодического звена соединен с вторыми входами первого и второго сумматоров, причем выход первого сумматора через второй усилитель соединен с первым входом третьего сумматора, второй вход которого соединен с выходом второго сумматора, а выход - с выходом элемента прогноза.
0t/eZ
| Устройство для автоматического вождения самоходных агрегатов | 1981 |
|
SU1001879A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
