1
Изобретение относится к горной промышленности, в к устройствам для бурения шпуров шахтными бурильными установками.
Известен агрегат бурильный, включающий опору, телескопическую рукоять, состоявдую из корпуса и гидроцилиндра раздвигания, гидроцилиндр подъема рукояти и следящее устройство. Функцию датчика рассогласования следящего устройства в этой конструкции выполняет следящий гидрораспределитель, золотник которого через посредство упругих элементов взаимодействует со штоком, закрепленшмм на корпусе рукояти 11Х
Данная конструкция позволяет осуществлять раздельное упра.вление подъемом и раздвижеь-ием рукояти, однако при переходе с ручного на автоматическое управле1гае раздвижением рукояти ее конец возвращается в одну и ту же определенную вертгасальную плоскость, что при обуривании криволинейт х забоев исключает возможность использования
автоматического управления раздвижением рукояти.
Наиболее близкик к предлагаемому по технической сущности и достигаемому результату является агрегат бурильный, включающий шарнирно связанную с опорой телескопическую рукоять с размещенным внутри нее гидроципиндром раздвигания, гидроцилиндр подъема рукояти, щарнирно
,Q связанный с рукоятью, гидрораспределители раздвигания и подъема и следящее устройство, связанное с опорой и руко- ятью и содержащее задающее устройство, датчик рассогласования, выполненный в
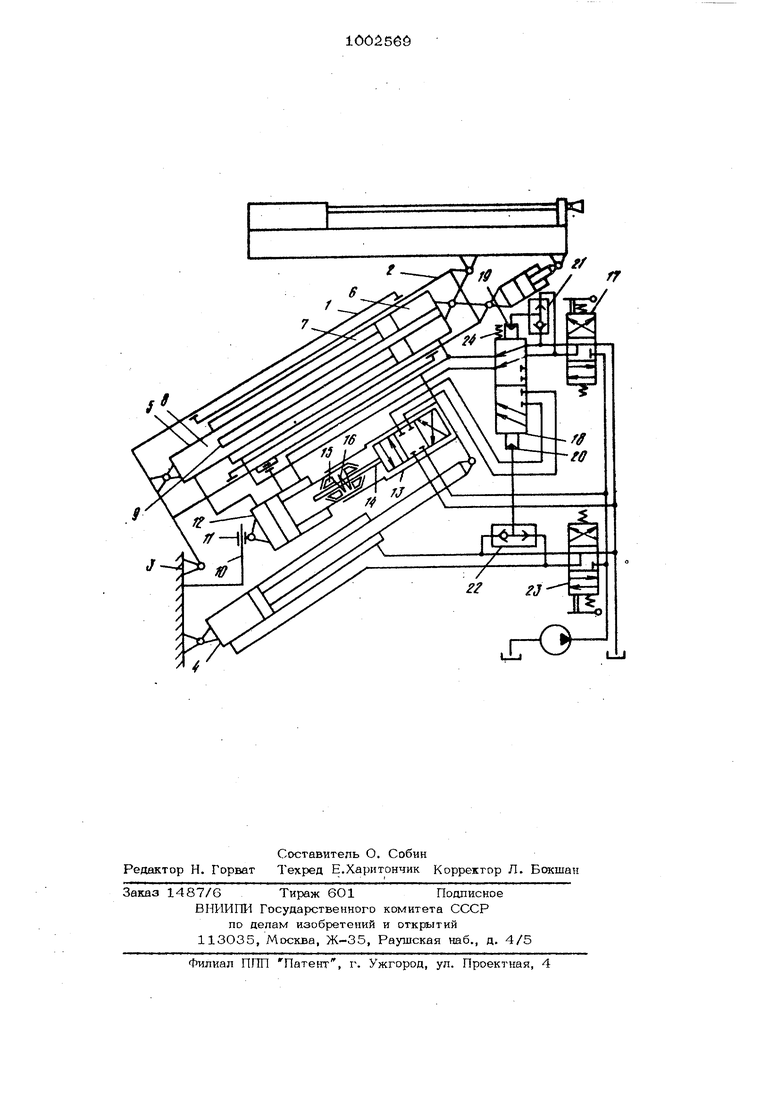
,5 виде следящего гидрораспределителя, имеющего золотник со штоком, и устройство, обратной связи, имеющее выдвижной элемент, кинематически связанные М€(жду собой. В данном устройстве кинематичео20 кая связь между устройством обратной связи и датчиком рассогласования выполнена в виде фрикционного захвата, размещенного на выдвижном элементе устрой ства обратной , при этом шток зо- Ю потника следящего гидрораспредепителя размещен в захвате. В этом агрегате бурильном конец телескопической рукоят в режиме автоматического изменения ее длины может перемещаться в любой ве{ тикальной плоскости, допускаемой кинематикой агрегата бурильного, что обеопечивает возможность обуривания криволинейных забоев в режиме автоматического изменения длины телескопической рукояти С 2 J. Одна1:о для перевода конца рукояти из одной вертикальной плоскости в другую необходимо вручную временно отключать следующее устройство при помощи спеии- ального гкдрораспредёлителя, что усложняет управление бурильным агрегатом. Целью изобретения является упрощение управления агрегата бурильного путем автоматизации управления следящим устройством. Эта цель достигается тем, что в агре гате бурильном, включающем телескопиче кую рукоять с гидроцилиндром раздвигания, гидрораспределитель раздвигания, i гидроцилиндрподъема, гидравлически свя занный с гидрораспределителем подъема, следяодее устройство с датчиком рассогласования в ввде следящего гидрораспределителя, гидравлические магистрали подвода и отвода жидкости,, гидроцилиндр раздвигания гидравлически связан с гидрораспредепителем раздвигания и следящим гидрораспределителем посредством дополнительного двухпозишюнного гидро- распределителя с двумя управляющими камерами, при этом выходные магистрали гидрораспределителей подъема и раздвигания снабжены клапанами ИЛИ, соответственно сообщенными с управляющими камерами двухпозияионного гидрораспре- делителя. На чертеже схематично изображен агрегат бурильный. Агрегат бурильный включает телескопическую рукоять, состоящую из корпуса 1 и телескопа 2, щарнирно соединенную с опорой 3. Между телестсопической рукоятью и опорой щарнирно размещен гидроцилиндр подъема рукояти 4. Внутри телескопической рукояти {эазмещен гидроцилиндр раздвигания 5. Гидроципиндр раздвигания 5 содержит порщневую 6, щтоковую 7 и плунжерную 8 полости. Плунжерная полость 8 расположена внутри щтока гидроиилиндра раздвигания 5 и в нее-входит плунжер 9, зак;репленный на корпусе гидроцилиндра раздвигания 5. Агрегат бурильный включает такб4же следящее устройство. Следящее устройство содержит задающее устройство, со- СТряшее из направляющей 10, закреп- ленной на опоре 3, и находящееся в зацеплении с ползуном 11, устройство обратной связи, выполненное в виде гидроцилиндра 12, корпус которого шарнирно соединен с ползуном 11 и установлен с Возможностью поступательного переме- щения на корпусе 1, датчик рассогласования, выполненный в виде следящего гидрораспределителя 13, корпус которого закреплен на корпусе 1, а щток золотника 14 соединен со штоком гидроцилиндра L2, который является выдвижным эле- ментом устройства обратной связи, через фрикционный захват. Фрикционный захват состоит из двух противоположно направленных цанг 15, поджимаемых пружиной 16. Поршневая и штоковая полости гидроцилиндра 12 гидравлически связаны соответственно с плунжерной 8 и поршневой 6 полостями гидроцилиндра 5. Поршневая 6 и штоковая 7 полости гидроцилкндра 5 связаны со следящим гидрораспределителем 13 и гидрораспределителем раздвигания 17 через дополнительный двухпозиционный гидрораспределитель 18 - с двумя управляющими камерами 19 и 20. -Управляющие камеры гидрораспределителя 18 соединены через клапаны ИЛИ 21 и 22 соответственно с выходными магистралями гидрорасп еделителей раздвигания 17 и подъема 22, причем выходные магистрали гидрораспределителя подъема 23 соединены соответственно с поршневой и щтоковой полостями гидроцилиндра подъема рукояти 4. Двухпозиционный гидрораспределитель 18 включа-i ет пружину 24, рассчитанную таким образом, что гидрораспределитель 18 во всех случаях, кроме случая наличия давления только в камере 2О, находится в позиции, показанной на фиг.1, а в случае наличия давления только в камере 2О переключается во вторую свою позицию. Агрегат бурильный работает следующим образом. В режиме ручного управления раздвиганием телескопической рукояти гидрораопределитель раздвигания 17. При этом давление через клапан ИЛИ 21 попадает в камеру 19, гидрораспределитель 18 переключается в позицию, показанную на чертеже и подает масло от гидро распределителя 17 в гидроцилиндр раздвигашш 5. При подаче масла в порщневую 6 (щтоковую 7) полость гидроцилиндра 5 он раздвигается (складывается), раздви- 51О гая (складывая) телескопическую рукоять Плунжер 9 перемещается в полости 8, увеличивая (уменьшая) ее объем. При этом гидроцилиндр 12 складывается (раздвигается), а фрикционный захват проскальзывает по штоку золотника 14 в направлении от опоры 3 (к опоре 3). Если при этом одновременно через гидрораспределитель подъема 19 подается масло в гидроцилиндр .4, который поднимает (опускает) телескопическую руноять, то ползун 11, взаимодействуя с направляющей 10, перемещает гидроцилиндр 12 поступательно вдоль телескопической рукояти в направлении, от опоры 3 (к опоре 3). Это приводит к дополнительному перемещению фрикционного захвата по штоку золотника гидрораспре- делителя 13 в ту же сторону. Фрикционный захват отрегулирован таким образом что усилие, необходимое для его проскальзывания по штоку золотника 14, больше усилия, необходимого для срабатывания гидрораспределителя 13. При этом давление через клапан ИЛИ 22 поступает также в камеру 2О, но гидрорас пределитель 18, как указано выше, остается в позиции, показанной на чертеже. При переходе на автоматический режим управления разшг.гганием телескопичеокой рукояти гидрораспределитель 17 запирается, а гидрораспределитель 23 открывается и масло поступает в гидроцилиндр подъема рукояти 4. Одновременно давление через клапан ИЛИ 22 посту пает в камеру 20 и гидрораспредеЛитель 18 переключается в позицию, противоположную показанной на чертеже, соединяя следящий гидрораспределитель 13 с гидроцилиндром раздвигания 5. При подаче масла в поршневую (штокову полость гидроцилиндра подъема рукояти 4 последний, раздвигаясь (складываясь) поднимает (опускает) телескопическую рукоять, ползун 11, взаимодействуя с Направляющей 10, перемещает гидроцилиндр 12 поступательно вдоль телеркопической рукояти в направлении от |опоры 3 (к опоре 3). При этом гидрора лределитель 13 включается и давление подается в поршневую (штоковую) полос гидроцш1индра 5. Гидроцилиндр 12, свя696занный гидравлически с гидроципиндром 5, по мере раздвюкения (складывания) последнего складывается (раздвигается), компенсируя перемещение, получаемое ОТ попзуиа 11. За счет раздвуокения (складывания) телескопичесхой рукояти ее конец перемещается в вертикальной плоскости, которая проходит через него к моменту перехода на автоматическое yiw равление раздвиганием рукояти, Предложенное конструктивно решение позволяет управлять агрегатом бурильным меньшим количеством ручных гидрораспределителей (так как ручной гидрораспределитель включения следящего устройства в предложенной схеме не требуется), что упрощает управление агрегатом бурильным. Формула изобретения Агрегат бурильный, включающий те|лескопическую рукоять с гидроцилиндром {раздвигания, гидрораспределитель раздвигания, гидроцилиндр подъет а, гидравлически связанный с гидрораспределит&лем подъема, следящее устройство с датчиком рассогласования в виде следящего гидрораспределителя, гидравлические магистрали тодвода и отвода жидкости, отличающийся тем, что, с целью упрощения управления агрегатом, гидропихгандр раздвигания гидравлически связан с гидрораспредепителем раздвигания и следящим гидрораспределителем посредством дополнительного двухпозииионного гидрораспределителя с двумя управляющими камерами, при этом выходные магистрали гидрораспределителей подъ ма и раздвигания снабжены клапанами ИЛИ соответственно сообщенными с yivравляюшими камерами двухпозишюнного гидрораспределителя. . Источники информации, принятые во внимание при экспертизе 1.Авторское свидетельство СССР № 509714, кл. Е 21 С 11/О2, 1974. 2.Авторское сввдетельство СССР по заявке № 3248897, кл. Е 21 С 11/02, 30.12.80 (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| Бурильный агрегат | 1980 |
|
SU1002570A1 |
| Буровая стрела | 1978 |
|
SU729345A1 |
| Манипулятор | 1983 |
|
SU1155741A1 |
| Устройство для управления горным комбайном со стреловидным исполнительным органом | 1977 |
|
SU693004A1 |
| Буровая стрела | 1974 |
|
SU509714A1 |
| МНОГОСЕКЦИОННЫЙ ГИДРОПРИВОД КРАНОМАНИПУЛЯТОРНОЙ УСТАНОВКИ | 2007 |
|
RU2352518C1 |
| Буровая стрела | 1973 |
|
SU573583A2 |
| Гидропривод рабочего оборудования фронтального погрузчика | 1989 |
|
SU1680887A1 |
| Устройство автоматического управления гидравлическим экскаватором | 1988 |
|
SU1641953A1 |
| Бульдозерный агрегат | 1985 |
|
SU1406310A1 |