Изобретение относится к медицине, а именно к восстановлению двигательной функции.
Известен способ коррекции двигательной функции человека путем отведения биотоков . мьтщ, регулирующих произвольное движение, фосяшированне из них 3лектросигнала с последующей стимуляцией мышц полученным сигналом 1 . ,
Однако данный способ не обеспечивает оптимального взаимодействия неррных центров безусловного и условного рефлексов, необходимого для ускорения сроков коррекции двигательной функции. .
Цельючизобретения является ускорение сроков коррекции двигательной функции.
Поставленная цель достигается тем, что согласно способу коррекции двигательной функции человека путем отведения биотоков/ мышц регулирующих произвольное движение, фохялирование , из них электросигнала с последующей стимуляцией мьшщ полученным сигналом стимуляцию осуществляют через 2-5 с после макс1 ально. возможного произвольного движения-на.область двигательной точки мышц, обеспечивающих
двигательную функцию, при зтом на мышцы подают электросигнал, достаточный для непроизвольного ее сокращения.
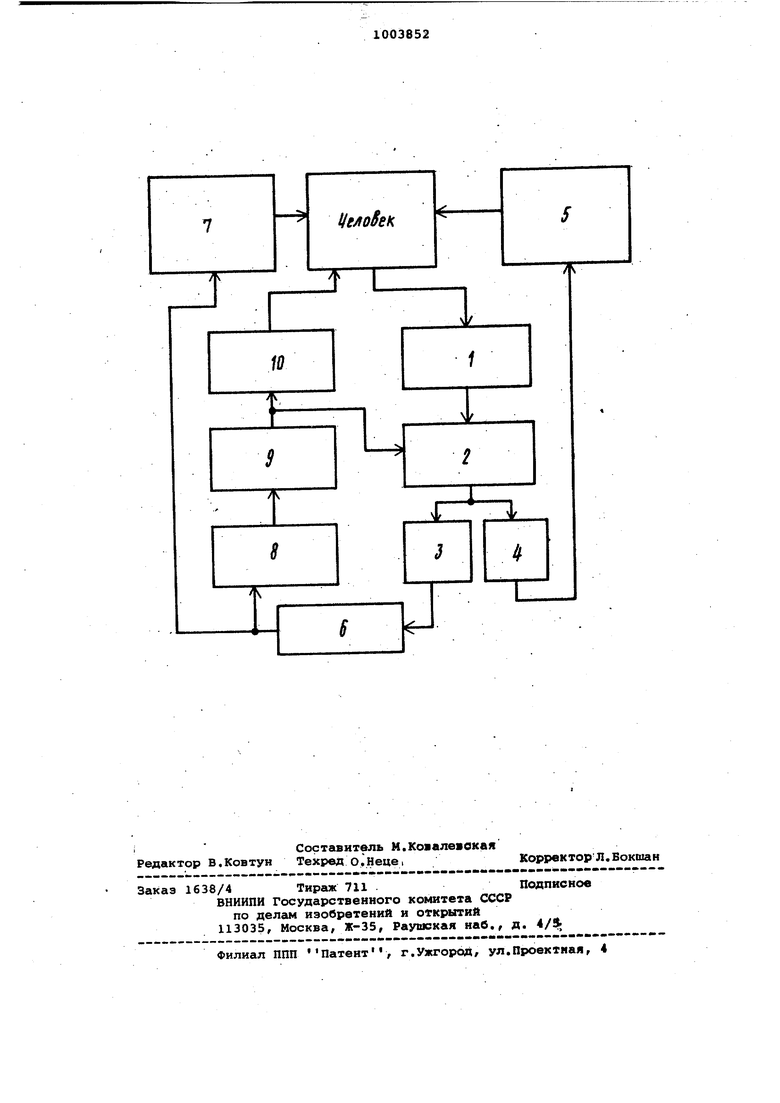
На чертеже представлена структурная схема установки для осуществления способа коррекции двигательной функции человека. .
Устройство состоит из усилителя I
10 биопотенциалов, коммутатора 2, интеграторов 3 и 4 блока 5 обратной зрительной связи, порогового устройства 6, блока 7 звуковой обратной связи, интегратора 8, порогового устIJSройства 9 и злектростимулятора 10.
Способ осуществляется с помощью установки для коррекции двигательной функции человека.
Больному на область двигательной
20 точки мыищы и На область прохождения двигательного нерва накладывают стимулирующие злектроды, предлагают выполнить движение, при котором максимально сокращается мышца. При зтом
25 постоянно снимают ЭМГ.
Усиливаемый усилителем 1 биопотенциалов, сигнал электромиограммы малоберцовой мьиицы проходит через электронный коммутатор 2, Интеграторы 3
30 и 4 интегрируют полученные сигналы с постоянными времени 100 мс и 500 мс Сигнал ЭМГ с одного из интеграторов , амплитуда которого пропорциональна степени сокращения мышцы, поДают на осциллограф блока 5 обратной зрительной связи, что позволяет пациенту контролировать себя с помощью зрения - степень отклонения светового пятна на экране соответствует степени сокращения мышцы. Таким образом пациенту дают задание добиваться максимального смещения светового пятна на экране. Сигнал с другого интегратора поступает на пороговое устройство 6, которое вырабатывает сигнал для блока 7 звуковой обратной связи. При превышении амплитуды интегрированной ЭМГ 0,75 от максимально возможного значения амплитуды ЭМГ (при максимально возможном сокращении мышцы) блок 7 звуковой обратной связи генерирует звуковой сигнал. Звуковой сигнал является поовфением для пациента, свидетельствует о правильноети действий. По истечении 2-5 с фиксации произвольно максимального сокращения мышцы срабатывает пороговое устройство 9 и запускает электростимулятор 10. Амплитуду электростимуляции выбираю таким образом, чтобы из исходного по ложения при электростимуляции получить полное непроизвольное сокращение мышцы. Испытания проведены на 21 больном с детским церебральным параличом в возрасте 5-12 лет которые составили две группы. Первая группа, основная (11 человек), подвергалась коррекции движения с помощью предлагаемого спо соба, вторая группа (10 чел) - с помощью известного способа. В клинической картине у всех боль ных преобладали нефиксированные конт рактуры в голеностопном сустав.е при эквинусной Деформации стопы обуслов ленные преимущественно рефлекторной формой, спастичности трехглавых мышц голени (по данным рефлекса растяжения) . Признаки выраженных, органических изменений в периартикулярных и мышечнЫх тканях у всех больных отсутст |Вовали (по кЛиникоэлектрофизиологическим данным). В качестве объекта коррекции была выбрана малоберцовая мышца, так как она при данном заболевании находится в неблагоприятных функциональных условиях. Лечебные процедуры были направлены на увеличение активности тренируемой мышцы и улучшение произвольного управления мышцей. С каждым больным было проведено по 10 сеансов тренировки в течение 20 дней. Каждый сеанс состоял из 5 циклов тренировки с интервалами между ними в 2 мин, длительность каждого цикла составлял 2-3 мин. Установлено постоянное увеличение степени сокращения мышцы. Сопоставительный анализ показал, что за данный промежуток времени амплитуда ЭМГ выросла в 1,66 раза по сравнению с результатами, полученными в контрольной группе. Кроме того, положительный терапевтический эффект у больных основной группы проявляется уже в первом сеансе тренировки. Способ коррекции двигательной функции человека позволяет использовать одновременное взаимодействие физиологических механизмов безусловно-рефлекторного и произвольного управления движениями с помощью сигналов обратной связи, тем самым обеспечивая сокргицение сроков реабилитации двигательной функции больных с центральными и перефирическими нарушениями опорно-двигательного аппарата. Формула изобретения Способ коррекции двигательной функции человека путем отведения биотоков мышц, регулирующих произвольное движение, формирование из них электросигнала с последующей стимуляцией мышц полученным сигналом, о тличающийс я тем, что, с целью ускорения сроков коррекции двигательной функции, стимуляцию осуществляют через 2-5 с после максимально возможного произвольного движения на область двигательной точки мышц, обеспечивающих двигательную функцию, при этом на мышцы подают эле||стросигнал, достаточный для непроизвольного ее сокращения. Источники информации, принятые во внимание при экспертизе 1. Авторское свидетельство СССР W 553968, кл. А 61 В 5/02, 1974.
tle/ioSsK
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ЛЕЧЕБНОЙ ФИЗКУЛЬТУРЫ ПРИ КОСОЛАПОСТИ | 1999 |
|
RU2152768C1 |
| Способ реабилитации больных с поражением жевательной мускулатуры | 1982 |
|
SU1289446A1 |
| Способ управления сокращениями двигательных мышц человека | 1974 |
|
SU553968A1 |
| Способ реабилитации больных при параличе мимических мышц | 1988 |
|
SU1673113A1 |
| Способ управления сокращениями двигательных мышц человека | 1979 |
|
SU982700A1 |
| СПОСОБ ВОССТАНОВИТЕЛЬНОГО ЛЕЧЕНИЯ БОЛЬНЫХ С НИЖНИМ МОНО- И ПАРАПАРЕЗОМ С ПОВРЕЖДЕНИЕМ ПЕРИФЕРИЧЕСКОГО НЕРВА | 2012 |
|
RU2506970C1 |
| СПОСОБ ЛЕЧЕНИЯ СКОЛИОТИЧЕСКОЙ ДЕФОРМАЦИИ У ДЕТЕЙ | 2008 |
|
RU2404707C2 |
| Способ восстановления двигательной функции кисти | 1989 |
|
SU1703132A1 |
| Способ лечения больных с двигательными церебральными расстройствами | 1979 |
|
SU856462A1 |
| СПОСОБ И УСТРОЙСТВО АВТОМАТИЗИРОВАННОЙ КОРРЕКЦИИ ПОЗЫ И ДВИЖЕНИЙ ВЕРХНЕЙ КОНЕЧНОСТИ В ЛОКТЕВОМ СУСТАВЕ | 2021 |
|
RU2778777C1 |
J 1
/ч
/
