Изобретение относится к станкостроению и может быть использовано в металлорежущих станках, например в горизонтально расточных с подвижной стойкой и вертикально перемещающейся шпиндельной бабкой.
Известно устройство для компенсации деформаций в расточных станках с подвижными стойками, применяемое в схеме с гидроуравновешиванием и со сложной системой слежения за перемещением гильзы Ц.
Недостатком данного устройства является некоторая инерционность, вызываемая промежуточным рабочим телом. Подобные схемы компенсации действенны только с системой гидроуравновешивания.
Наиболее близким к изобретению является устройство для ограничения прогиба и наклона выдвигаемого горизонтального ползуна, в котором компенсация прогиба ползуна от собственного веса при его выдвижении осуществляется перераспределением веса груза между двумя тросами по заранее заданному закону, определяемому углом наклона. За счет перераспределения веса между тросами, происходит такой поворот саней, что шпиндель,
Iразмещенный в ползуне, не теряет свою координату С 23.
Недостатком известного устройства является то, что при применении на станках с подвижной стойкой и достаточно большими скоростями ускоренных перемещений стойки (.до 8 м/мин ) требуется фиксация груза для исключения его раскачивания. При данной схе10ме уравновзиивания, обеспечивающей компенсацию деформаций ползуна при его перемещении, сделать это сложно.
Цель изобретения - упрощение конструкции устройства при обеспечении
15 постоянства позиционирования.
Указанная црль достигается тем, что устройство для компенсации прогиба выдвижного ползуна шпиндельной бабки, установленной с возмож20ностью вертикального перемещения, содержащее огибакяций ролики гибкий элемент, соединенный с механизмом уравновешивания и привод перемещения ползуна, снабжено дополнительным
25 ползуном, установленным в выполненных в шпиндельной бабке направляющих и кинематически связанным с приводом перемещения основного ползуна передаточным числом,равным отношению
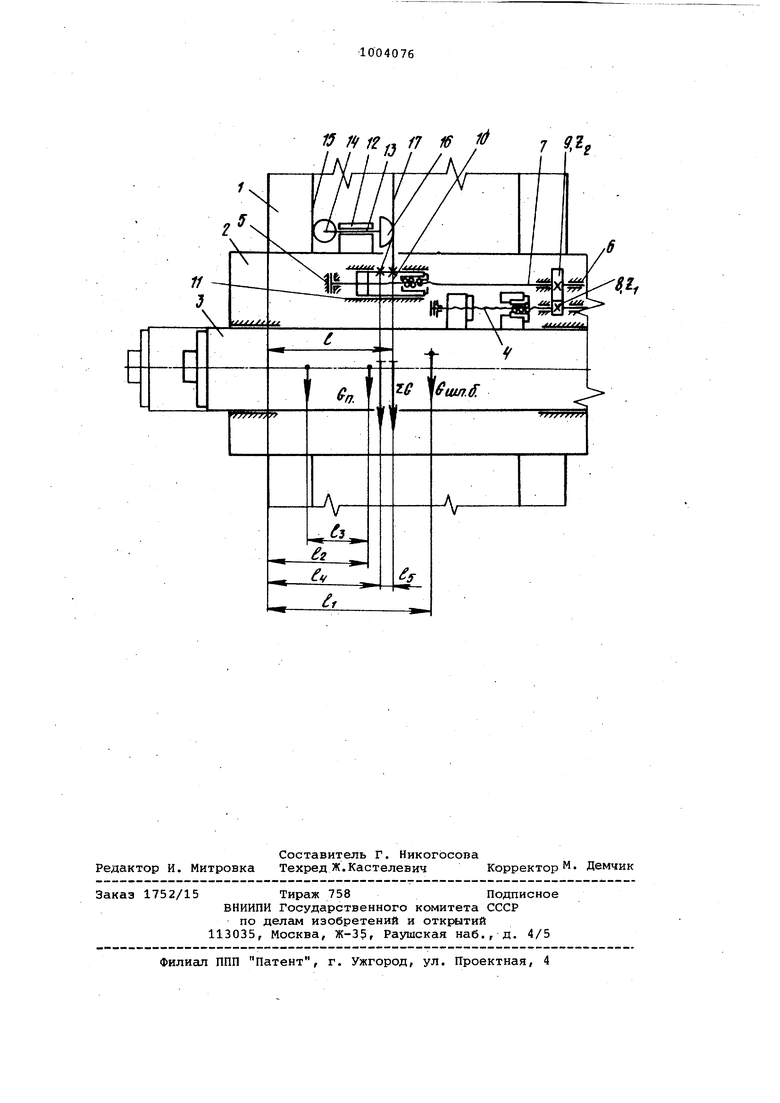
30 суммы весов шпиндельной бабки и основного ползуна к весу последнего, причем с дополнительным ползуном же стко соединен гибкий элемент, взаим действующий с введенным в устройств упором для ограничения ее перемещения, установленным на шпиндельной бабке. На чертеже показана схема устрой ства. На направляющих стойки 1 расточного станка расположена шпиндельная бабка 2, в которой размещен основной ползун 3 с возможностью перемег Ыения посредством шарико-винтовой пары 4. В шпиндельной бабке 2 в подшипни ках 5 и б установлена шарико-винтов пара 7, винт которой кинематически через зубчатые колеса 8 и 9 связан с при§о;1ом перемещения основного ползуна 3, а гайка установлена в дополнительном ползуне 10, который может перемещаться по своим направл ющим 11, выполненным в верхней част шпиндельной бабки 2. На шпиндельной .бабке 2 сверху установлен упор, выполненный в виде стойки 12, несущей шток 13, в ко тором с левой стороны находится ролик. 14, контактирующий с клиновой направляющей 15 и при перемещении шпиндельной бабки 2 катящийся по не В правой части штока 13 жестко закреплен сектор 16, в ручье которого располагается гибкий элемент 17,выполненный в виде троса,жестко закрепленный в дополнительном ползуне 10, а вторым концом соединенный с м ханизмом уравновешивания шпиндельной бабки 2. Работа устройства для компенсаций прогиба выдвигаемого ползуна шпиндельной бабки основана на слежении точкой подвеса системы шпиндельная бабка - ползун за перемещением ее центра тяжести при переме щении ползуна. Слежение осуществляе ся автоматически за счет кинематической связи между винтом привода tперемещения ползуна 3 и винтом перемещения дополнительного ползуна 1 с определенным передаточным числом Определяется центр тяжести систе мы шпиндельная бабка - основной пол зун по формуле . . где - координата общего центра тяжести системы; ШР Б шпиндельной бабки; K-J - координата центра тяжести шпиндельной бабки; Ь„ - вес основного ползуна, 2 координата центра тяжест основного ползуна. При перемещении основного ползуна/ влево от первоначгипьного положения на величину РЗ, центр тяжести определяется .S«n.VM 2-f3) Путем вычитания из уравнения (1) уравнения (2) получают величину перемещения центра тяжести системы при перемещении основного ползуна на величину 3 1 -е-е -( 5 ..п ; 5 ..п Чп.6-г1 п1Ч-Рэ) t nшп. iun. При делении обеих частей уравнения (3) -на РЗ получают . .,п где величина -:- является отношением ; . 3 изменения координаты общего центра тяжести системы к перемещению координаты центра тяжести основного ползуна при его перемещении, т.е. эта величина является передаточным числом между механизмами привода перемещения основного ползуна 3 иперемещения дополнительного ползуна 10, что можно выразить следукяцим образом .. где 1 - передаточное число; 2 - зубчатое колесо 8; 7-2 - зубчатое колесо 9. Таким образом, для обеспечения устойчивого положения шпиндельной бабки 2 при перемещении основного ползуна 3 необходимо следить точкой подвеса троса за изменением координаты центра тяжести системы шпиндельная бабка - основной ползун, а передаточное число в этом случае между механизмом перемещения основного ползуна 3 и механизмом перемещения дополнительного ползуна 10 должно равняться отношению суммы весов системы к весу подвижных частей. Устройство работает следующим образом. При включении привода перемещения основного ползуна 3 начинает вращаться винт шарико-винтовой пары 4, и ползун начинает перемещаться, например, влево. Одновременно с вргиаеннем винта шарико-винтовой пары 4 начинае вращаться винт шарико-винтовой пары 7, которые между собой соединены с помощью зубчатых колес 8 и 9 с пере.22 даточным числом i , и перемещается влево по направлякхаим 11 дополнительного ползуна 10, так как в нем закреп лен гибкий элемент 17, то перемещается и точка подвеса шпиндельной бабки. При перемещении влево точки подвеса троса, последний огибает сектор 16, опирающийся через штОк 13 и ролик 14 на клиновую направляющую 15, сохра няя тем сакшм постоянное положение гибкого элемента 17 над сектором 16, а точка подвеса шпиндельной бабки при вьщвмжении основного ползуна 3 влево постоянно находится в одной координате с перемвцаемым,центр( тяжести системы шпиндельная бабка - основной ползун. При изменении направления движения основного ползуна 3 изменяется направление движения дополнительного ползуна 10 и соответственно точка подвеса системы перемещается вправо. Данное устройство позволяет применять его как для ургшноввиивания подвижного узла (шпиндельной бабки ) с помощью груза, так и при гидроуравйовешиваниИ| так как при этом используется только одна гибкая связь - один трос. того, упрощается конструкция устройства и повьаиается его КПД. Формула изобретения Устройство для компенсации прогиба выдвижного ползуна шпиндельной бабки, установленной с возможностью вертикаль ного перемещения, содержащее огибающий ролики гибкий элемент с механизмом уравновешивания и привод перемещения ползуна,о т л и ч ю щ е е с я тем, что, с целью упрощения конструкции при обеспечении, постоянства позиционирования, устройство снабжено дополнительным ползуном, установленным в выполненных в шпиндельной бабке направляющих и кинематически связанным с приводсш . перемещения основного ползуна передаточным числом, равным отношению суьвш весов шпиндельной бабки и основного ползуна к весу последнего, причем с дополнительным ползуном жестко соединен гибкий элемент, взаимодействующий с введенным в устройство упором для ограничения его перемещения, установленным на шпиндельной бабке. Источники информации, принятые во внимание при экспертизе 1.Заявка Франции № 2354847, кл. В 23 Q 23/00, опублик. 1978. 2.заявка ФРГ 2933357, кл. В 23 Q 23/00, опублик. 1980. IS П 11 „ /7 16 7 I / .
| название | год | авторы | номер документа |
|---|---|---|---|
| ГИДРОМЕХАНИЧЕСКОЕ УСТРОЙСТВО ДЛЯУРАВНОВЕШИВАНИЯ ПОДВИЖНЫХ УЗЛОВМЕТАЛЛОРЕЖУЩИХ СТАНКОВ | 1971 |
|
SU420408A1 |
| Фрезерно-расточной станок | 1981 |
|
SU997995A2 |
| Устройство для уравновешивания подвижного узла | 1981 |
|
SU948551A1 |
| Устройство для уравновешивания вертикально перемещающегося узла станка с подвижной стойкой | 1982 |
|
SU1106598A1 |
| Многоцелевой станок | 1988 |
|
SU1535699A1 |
| ИЧЕСНАЙ БИБЛИОТЕКА | 1969 |
|
SU252044A1 |
| Устройство для автоматического позиционирования узла станка портального типа | 1984 |
|
SU1242337A1 |
| Стенд для испытания интеллектуальной системы адаптивного управления процессом резания на металлорежущих станках со шпиндельным узлом с активными магнитными подшипниками | 2015 |
|
RU2690625C2 |
| Станок портального типа | 1980 |
|
SU918017A1 |
| Многошпиндельная расточная бабка | 1979 |
|
SU818767A1 |