(54) ГИДРОМЕХАНИЧЕСКАЯ СИСТЕМА УПРАВЛЕНИЯ ПОЛОЖЕНИЕМ РАБОЧЕГО ОРГАНА ДОРОЖНО-СТРОИТЕЛЬНОЙ МАШИНЫ
Цель изобретения - повьшение надежности работы.
Поставленная цель достигается тем что корпус распределителя снабжен хвостовиком, установленным с возможностью продольного перемещения соосно золотнику, при этом толкатель связан с золотником посредством винтового соединения и выполнен с гранями для взаимодействия с корпусом распределителя .
Кроме того, хвостовик и золотник связаны посредством.пружины и выполнены с торцовыми шлицами.
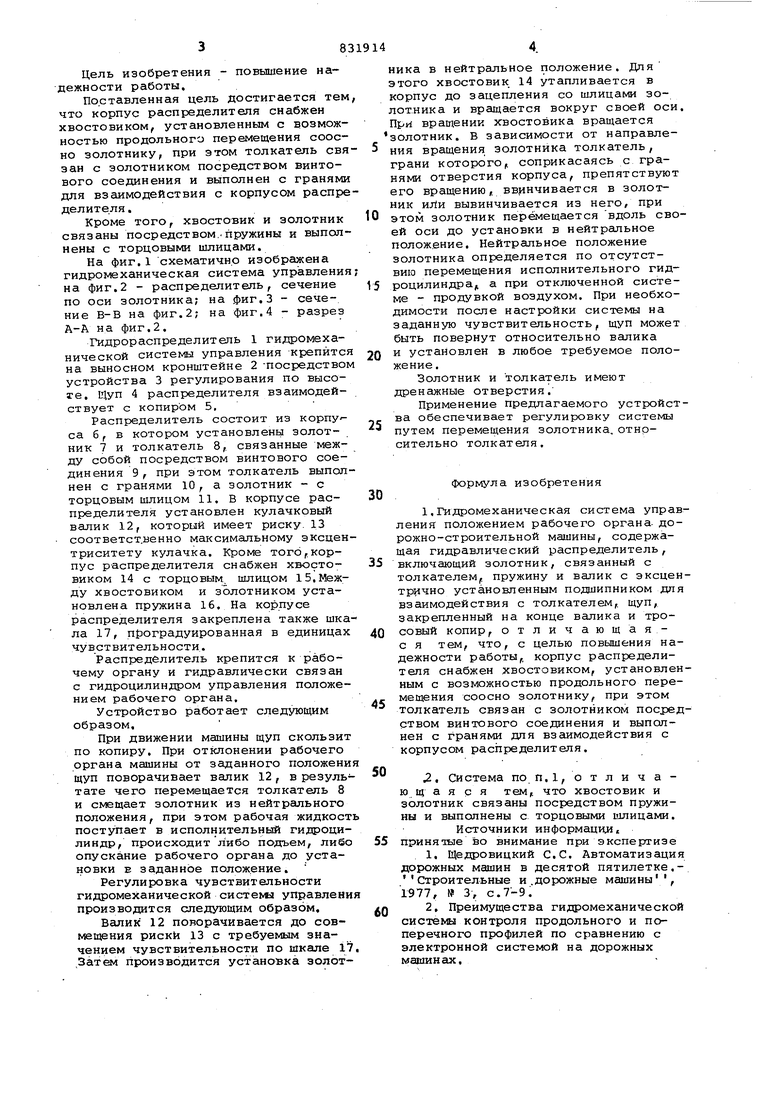
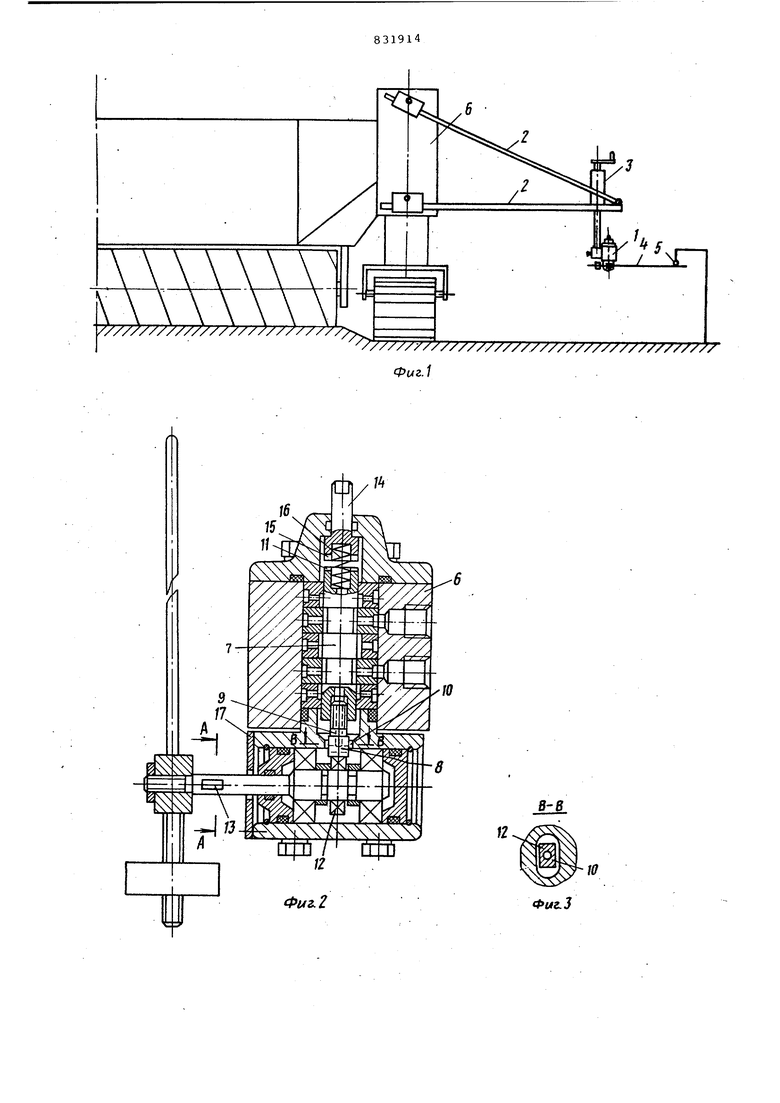
На фиг,1 схематично изображена гидромеханическая система управления на фиг,2 - распределитель, сечение по оси золотника; на фиг,3 - сечение В-В на фиг.2; на фиг.4 - разрез А-А на фиг,2.
Гидрораспределитель 1 гидромеханической системы управления крепится на выносном кронштейне 2 -посредством устройства 3 регулирования по высоте. Щуп 4 распределителя взаимодействует с копиром 5,
Распределитель состоит из корпу-са 6, в котором установлены золотник 7 и толкатель 8, связанные жжду собой посредством винтового соединения 9, при этом толкатель выполнен с гранями 10, а золотник - с торцовым шлицом 11, В корпусе распределителя установлен кулачковый валик 12, который имеет риску. 13 соответст.венно максимальному эксцентриситету кулачка, KPONK того,корпус распределителя снабжен хвостовиком 14 с торцовым, шлицом ISiМежду хвостовиком и золотником установлена пружина 16, На корпусе распределителя закреплена также шкала 17, проградуированная в единицах чувствительности.
Распределитель крепится к рабочему органу и гидравлически связан с гидроцилиндром управления положением рабочего органа.
Устройство работает следующим образом.
При движении машины щуп скользит по копиру. При отклонении рабочего органа машины от заданного положения щуп поворачивает валик 12, в результате чего перемещается толкатель 8 и смещает золотник из нейтрального положения, при этом рабочая жидкость поступает в исполнительный гидроцилиндр, происходит либо подъем, либо опускание рабочего органа до установки в заданное положение.
Регулировка чувствительности гидромеханической система управления производится следующим образом.
Валик 12 поворачивается до совмещения риски 13 с требуемым значением чувствительности по шкале 17 .Затем производится установка золотника в нейтральное положение. Для этого хвостовик 14 утапливается в корпус до зацепления со шлицами золотника и вращается вокруг своей оси. При вращении хвостовика вращается золотник. В зависимости от направления вращения золотника толкатель, грани которого, соприкасаясь с гранями отверстия корпуса, препятствуют его вращению, ввинчивается в золотник VLJiK вывинчивается из него, при
этом золотник перемещается вдоль своей оси до установки в нейтральное положение. Нейтральное положение золотника определяется по отсутствию перемещения исполнительного гидроцилиндра а при отключенной системе - продувкой воздухом. При необходимости после настройки системы на заданную чувствительность, щуп может быть повернут относительно валика
и установлен в любое требуемое положение .
Золотник и толкатель имеют дренажные отверстия,
Применение предлагаемого устройства обеспечивает регулировку системы
путем перемещения золотника, относительно толкателя.
формула изобретения
1,Гидромеханическая система управления положением рабочего органа- дорожно-строительной машины, содержащая гидравлический распределитель,
5 включающий золотник, связанный с
толкателем, пружину и валик с эксцентрично установленным поддаипником для взаимодействия с толкателем,, щуп, закрепленный на конце валика и тро0 совый копир, отличающаяс я тем, что, с целью повышения надежности работы,, корпус распределителя снабжен хвостовиком, установленным с возможностью продольного перемещения соосно золотнику, при этом толкатель связан с золотником посредством винтового соединения и выполнен с гранями для взаимодействия с корпусом распределителя,
,2, Система по п,1, отличающаяся тем, что хвостовик и золотник связаны посредством пружины и выполнены с торцовыми шлицами. Источники информации,
5 принятые во внимание при экспертизе
1, Щедровицкий С,С, Автоматизация дорожных машин в десятой пятилетке,Строительные и дорожные машины , 1977, 3, с.7-9,
д2, Преимущества гидромеханической
системы контроля продольного и поперечного профилей по сравнению с электронной системой на дорожных машинах.
| название | год | авторы | номер документа |
|---|---|---|---|
| Гидромеханическая система стабилизации горизонтального положения рамы дорожно-строительной машины | 1981 |
|
SU1006643A1 |
| Устройство контроля положения рабочего органа и курса движения дорожно-строительной машины | 1983 |
|
SU1148949A1 |
| ГИДРОМЕХАНИЧЕСКОЕ СЛЕДЯЩЕЕ УСТРОЙСТВО СЕЛЬСКОХОЗЯЙСТВЕННОЙ МАШИНЫ | 2007 |
|
RU2372216C2 |
| Гидромеханическая система стабилизации положения рабочего органа планировочной машины | 1983 |
|
SU1164375A1 |
| УСТРОЙСТВО для ПРАВКИ СУКНА НА АСБЕСТОЦЕМЕНТНОЙ ФОРМОВОЧНОЙ МАШИНЕ | 1972 |
|
SU358451A1 |
| ГИДРОМЕХАНИЧЕСКАЯ СИСТЕМА СТАБИЛИЗАЦИИ ПОЛОЖЕНИЯ РАБОЧЕГО ОРГАНА ДОРОЖНО-СТРОИТЕЛЬНОЙ МАШИНЫ | 2011 |
|
RU2470120C1 |
| КОПИРУЮЩЕЕ УСТРОЙСТВО АВТОМАТА ВОЖДЕНИЯ КОРНЕПЛОДОУБОРОЧНОЙ МАШИНЫ | 2004 |
|
RU2270551C2 |
| Устройство управления самоходной сельскохозяйственной машиной | 1989 |
|
SU1676474A1 |
| ГИДРОМЕХАНИЧЕСКАЯ СИСТЕМА СТАБИЛИЗАЦИИ УГЛА НАКЛОНА РАБОЧЕГО ОРГАНА ПЛАНИРОВОЧНОЙ МАШИНЫ | 2010 |
|
RU2422594C1 |
| Гидравлическая система управления рабочим органом землеройной машины | 1978 |
|
SU876889A2 |
Фиг. 2
В-В
10
Фиг.3
