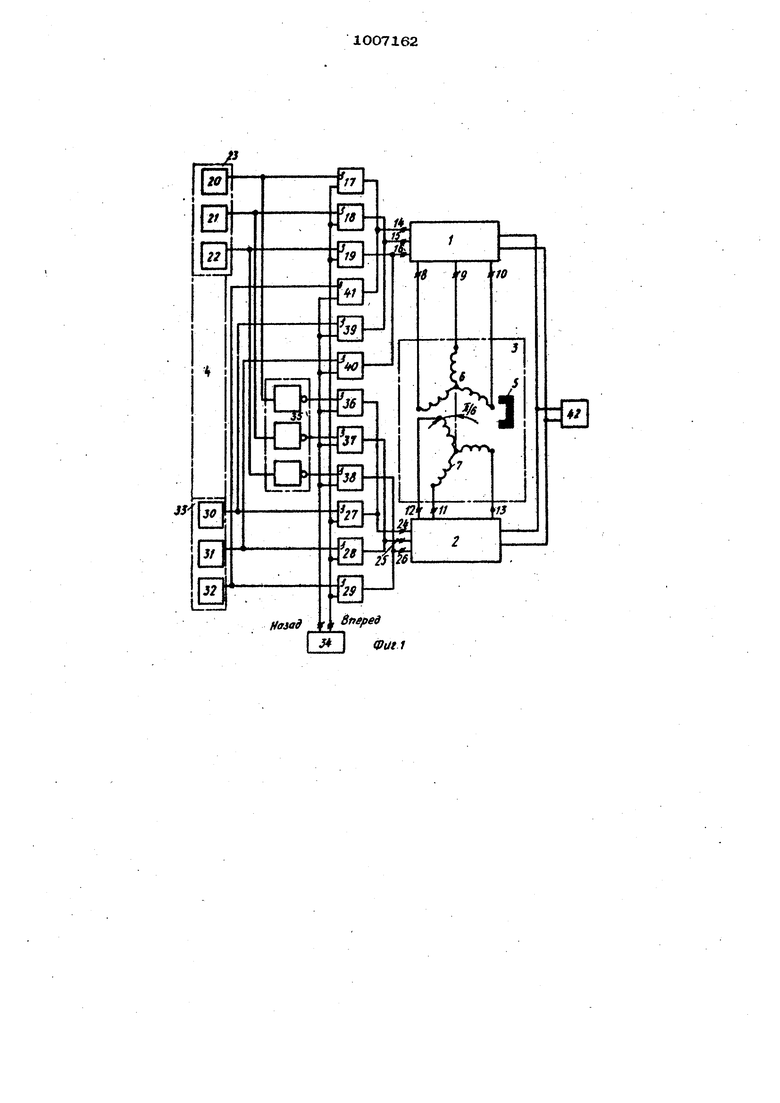
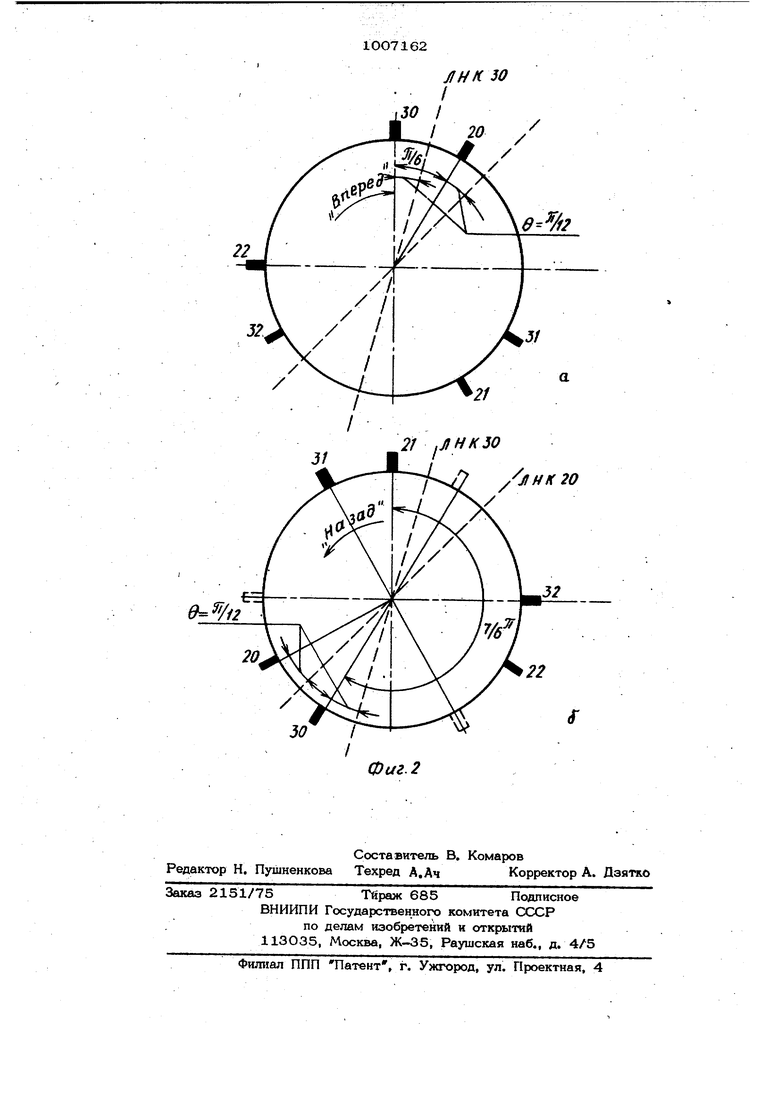
Изобретение относится к области эле тротохники и, в частности, к электропри воду. Изобретение может быть использован в электроприводах органов управления подвижного объекта. Известны вьюокоскоростные реверсивны вентильные электродвигатели, содержащи четырехсекционную якорную обмотку и многоканальное реле реверса. Электродвигатель обеспечивает идентичные элек тромеханические характеристики при пра BQM и левом направлениях вращения с одним комплектом чувствительных элеме тов датчика положения ротора, установленного с опережающей коммутацией на угол 9 45 эд. град, l и .2 . Недостатком дарных устройств является то, что они не обеспечивают идентичные электромеханические характеристики правого и левого направлений вращения при углах опережающей коммутации, отличных от 45 эл. град. Для вентильных магнитоэлектрических электродвигателей малой и средней мощности необхо}1имость в установке оптимальной опережающей коммутации в 45 эл. град, возникает при разработке супервысокоскоростных электродвигателей с частотами вращения 60000 об/мин и более. Для электродвигателей нормального исполнения из соображений надежности и ресурса приняты существенно более низкие частоты вращения 6ООО-12ОО об/м В последнее время наметилась тенденция выполнения вентильных электродвигателей средней и большой мощности с двумя многосекционными якорными обмотками, смещенными в пространстве на определенный угол. Такое вьтолнение вентильного электродвигателя уменьщает пульсации. Наиболее близким к изобретению является реверсивный вентильный электродвигатель, содержащий синхронную мащину с двумя (2 П +1) секционными якорными обмотками, смещенными в пространстве на угол 1i /2(2 п +1) эл. град и подключенными к выходам первого и второго преобразователей частоты, управ ляюшие цепи которых, для направления вращения вперед связаны непосредствонно с чувствительными элементами первого и второго комплектов датчика положения ротора, установленного с oneреяспющей коммутацией на угол в II /4(2 п +1) эл. .. где 1, 2, 3, ... З Недостатком известного технического решения является невозможность обеспечения идентичных электромеханических характеристик при правом и левом направлениях вращения с первым и вторым комплектами чувствительных элементов датчика положения ротора, установленного с опережающей коммутацией на угол в ti /4(2П +1) эл. град. Целью изобретения является расщире- кие области применения путем получения идентйчньк электромеханических характеристик вентильного электродвигателя при реверсе. I ,. . Поставленная цель достигается тем, что в реверсивном вентильном электродвигателе, содержащем синхронную ма- щину с двумя (2П +1) секционными якорными обмотками, смеще1шыми в пространстве на угол Ti /2(2Г) +1) эл. град и подключенными к выходам первого и второго преобразователей частоты, управ.ляющие цепи которых для направления вращения вперед связаны непосредственно с чувствительными элементами первого и второго комплектов датчика положения ротора, установленного с опережающей коммутацией на угол 0 и/4(2п +1), дополнительно для напр)авления вращения назад чувствительные элементы первого комплекта датчика положения ротора подключены к управляющим цепям второго преобразователя частоты через инвертор, а чувствительные элементы второго комплекта датчика положения ротора подключены к управляющим цепям первого преобразователя частоты со сдвигом на П чувствительных элементов в направлении вращения вперед, где П 1, 2, 3 ... На фиг. 1 изображена блок-схема реверсивного вентильного электродвигателя; на фиг. 2 - расположение чувствительных элементов датчика положения ротора для направлений вращения вперед (фиг. -2а) и назад (фиг. 2-6). Реверсивный вентильный электродвигатель с двумя трехсекдионными якорными обмотками содержит первый 1 и второй 2 преобразоЕйтели частоты, синхронн ную машину 3 и датчик 4 положения ротора. Преобразователи 1 и 2 частоты могут быть выполнены по любой известной схеме, например двухполупериодные, и на любых; известных переключающих приборах, например на транзисторах, Синхронная машина 2 может быть лю.бого типа, например с возбужденном от постоянных магнитов, и содержит индук- 3106 тор 5 и две тржхсекционные якорные обмотки 6 и 7, смешенные в пространстве на угол 1C /6 эл. град. Якорная обмотка 6 подключена к выходам 8-10 первого преобразователя частоты 1, а якорная обмотка 7 - к выходам 11-13 второго лреобразователя частоты 2. Для направле ния вращения вперед управляющие цепи 14-16 первого преобразователя 1 часто7Ъ1 связаны через двухвходовые логичес- кие схемы 17-19 совпадения с чувствительными элементами 2О-22 первого комплекта 23 датчика 4 положения ротора непосредственно, а управляющие цепи 24-26 второго преобразователя 2 частоты связаны через двухвходовые логические схемы 27-29 совпадения с чувствительными элементами ЗО-32 второго комплекта 33. Вторые входы логических схем 17-19, 27-29 совпадения объединены и подключены к одному выходу блока 34 задания направления вращения, например вперед. Для направления вращения вперед условно принят сдедующий порядок чередования сигналов вствительных элементов датчика 4 положения ротора: 20-21-22 и 30-31-32. Для направления вращения назад чувствительные элементы 20-22 комплекта 23 датчика 4 положения ротора подключены к управляющим цепям 24 26 второго преобразователя 2 частоты через инвертор 35 и три двухвходовые . логические схемы 36-38 совпадения, а чувствительные элементы 30-32 второго комплекта 33 датчика 4 положения ротора подключены к управляющим цепям 1514 первого преобразователя 1 частоты через три двухвходовью логические схемы 39-41 совпадения со сдвигом на один чувствительный элемент в направлении вращения вперед. Вторые входы логичес ких схем 36-41 совпадения объединены и подключены к другому выходу назад блока 34 задания направления вращения. Реверсивный вентильный электродвигатель подключен к источнику 42 электрической энергии. Для направления вращения вперед датчик 4 положения ротора установлен с опережающей коммутацией на угол у 1 /12 эл. град. (ф1г. 2а) ,оаяосительно .линии нейтральной коммутации (ЛНК) в направлении, противоположном вращению электродвигателя ЛНК 2О и 1ШК ЗО обозначают положения одноименных чувствительнък элементов 20 и 30 при нейтральной коммутации. Одноимен- . ные чувствительные элементы 2О и ЗО 24 первого 23 и второго 33 комплектов дат чика 4 положения ротора установлены со сдвигом на угол U /6 эл. граД. Датчик положения ротора может быть любого типа, например индуктивный с )юдмагничиванием. Для получения идентичных электро :«еханических характеристик при вращении назад чувствительные элемен 2О-22 и 30-32 датчика 4 положения ротора должны быть смещены из положения, изображенного на фиг. 2а в нап1явлент1 вращения вперед на угол 1t +2 эл.граД( или на 7/6 эл. град. Прт этом для направления смещения назад датчик 4 положения ротора 61 жется установлен также с опережающей коммутацией на угол б 11/12эл. град. (фиг. 26) относительно линии нейтральной кови мутаиии в направление, противоположном Ьращендю назад. . Сравнивая расположения чувствительных элементов 20-22 и ЗО-32 датчика 4 положения ротора (xsr. 2а и 26), мож-но сделать вывод, что для управления вентильным электродвигателем в режиме вращения назад могут быть использованы те же 1увствительные элементы 20-22 и ЗО-32, которые были установлены для направления вращения вперед, но только.с измененной схемой их подключения к управляющим цепям 14-16, 24-26 преобразователей 1 и 2 частоты. Для управления П}эео6разователем 2 частоты в режиме вращения назад следует использовать инверсные сигналы чувстви«льных элементов 2О-22 первого комп gO, а для управления первым преобразователем 1 частоты - сигналы чувствительных элементов ЗО-32 второго комплекта 33 со сдвигом на один чувствительный элемент в напрввлении враше, дня вперед, т.е. чувствительный эпе,ент ЗО должен быть связан с управляк)щей цепью 15 преобразователя частоты, а чувствительные элемента 31 к 32, соответственно, управляющими цепями 16 и 14. Реверсивный вентильный электроавигатель работает следующим образом При поступлении сигнала на вращение влеред логические схемы 17-19 и 27-29 совпадения обеспечивают поступление сигналов с чувствительных элементов 20-22 датчика 4 положения ротора на управляклцие цепи 14-16 первого преобразователя 1 частоты, а сигналов .с чувствительных элементо.а ЗО-32 на .управляющие цепи 24-26 второго преобразователя 2 частоты. Электродвигатель вращается вперед с углом опережающей коммутации, равным & Логические схемы 36-38 и 39-41 совпа дения отключены, поскольку на их вторы входах отсутствует сигнал управления с блока 34 задания направления вращения. При поступлении сигнала на вращение назад логические схемы 17-19 и 27-29 совпадения отключаются, а включаются логические схемы 36-41 Совпадения, которые обеспечивают поступление инвертированных в инверторе 35 сигналов с чувствительных элементов 2О-22 датчика 4 положения ротора на одноименные управляющие входы 24-26 преобразователя 2 частоты, а сигналов с чувствительных элементов 30-82 - на управляющие цепи 15-14 соответственно со сдвигом на один чувствительный элемент в направлении вращения вперед. Выявленные закономерности схемы подключения чувствительных элементов датчика положения ротора к управляющим цепям преобразователей частоты при реверсе также справедливы и для {2h+l) секционной якорной обмотки синхронной мащины, где п 1, 2, 3 .... Пусть синхронная машина содержит две {2л +1)-секционные якорные охотки смещенные в пространстве на угол 1 /2(2п +1) эл. град. Датчик положения ротора содержит два комплекта чувствительных элементов. В каждом комплекте имеется (2п +1) чувствительных элемен та. Одноименные чувствительные элемен|ТЫ разных комплектов сменюны друг относительно друга на угол U /2(2 И t+1) эл. град. Чувствительные элементы в комплекте размещены равномерно со эл. град. Датчик сдвигом на угол положения ротора установлен fi опережающей коммутацией на угол . эл. град Приняв за начало отсчёта точку, сортветствующую положению ЛНК 30 (фиг. 2а) для второго комплекта чувствительных элементов, а за положительное направление отсчета - направление вращения вперед, для координат Ц и к-тых чувствительных элементов первого и второго комплеках в (для нарравления вращения вперед) получим ..Jiibiil 2пм 2к(Кг-О ио -0 -InH Координат и S, к-тых чувствительных элементов первого и второго комплектов для направления вращения назад могут быть определены следующим образом Фк1-Ч. , После вьиислёния для указанных координат получим ..зв. itl2nv2KiH) tv:,0-v Координаты V j, смещенных на fi эл.град. К-тых чувствительных элементов первого комплекта, сигналы которых инверсны сигналам чувствительных элементов с координатами ( , определяются следзтощими выражениями п ,o,( Сравнивая (4) и (5), можно сделать вьшод, что координаты « j чувствительных элементов второго комплекта для направления вращения назад соответствуют координатам смещенных на 11 эл. град, одноименных (k ) чувствительных элементов первого комплекта для направления вращения вперед. Т.е. инверсные сигналы с чувствительных элементов дервого комплекта могут быть использованы для управления вторым преобразователем частоты для направления вращения назад. Возможность использования чувствительных элементов второго комплекта для управления первым преобразователем частоты для направления вращения назад может быть установлена в результате рещения уравнения вида V к. к Используя (2) и (3) получим 2 1. Т.е. для управления управляющей цепью первого преобразователя частоты для направления вращения назад использованы сигналы К.-того чувствительного элемента второго комплекта, порядковый номер которого определен из (6). Например, для управления первой управляющей цепью первого преобразовгателя частоты
следует использовать (П +2)-ой чувствительный элемент второго комплекта Aaiv чшса положения ротора. .
С точки зрения достижения поставленной цели безразлично, в какую сторону осуществлять сдвиг при подключении чувствительных элементов второго комплекта к управляющим цепям первого преобразователя частоты: в направлении вращения вперед или назад. Но, поскольку, всего в комплекте имеется (2 И ) чувствительных элементов, то удр&1ее говорить о кратчайшем сдвиге Ha.h чувствительных элементов в направлении вращения вперед. В частности, для трехсекционной якорной обмотки (ff ) требуется сдвиг на один чувствительный элемент, т.е. чувствительный элемент ЗО второтх) комплекта должен быть подключен к управляющей цепи 15 первого преобразователя 3L, частоты. Лля направления вращения вперед к указанной управляющей цепи 15 подключен чувствительный элемент 21 первого комплекта. ,
Для пятисекиионной якорной обмо1ки ( П 2) требуется сявиг на два чувствительных элемента, и т.д.
Изобретение решает задачу обеспечения идентичных алёктромеханяческвх характеристик правого и левого направлений вращения реверс1шного вентильного электродвигателя с одним бло1юм чувствительных элементов датчика положения ротора, установленного с опережахлпей . коммутацией на угол it/4(2n) эл. град где (2,11+1) - чисж) секций сушойиз двух якорных обмоток, смешенных в пространстве на угол li /2(2.П +1), а П « 1, 2, 3 .... Фактяческие значения углов опережающей коммутации для Л « 1, 2, 3 составляют, соответственно, 15,9 и 6,4 эл. град., что находится в диапазоне оптимальных значений.этих углов. Учитывая пологий характер функций в области Ьптимальныэг значен уг, опережакицей коммутации,, можно считать такое приближение достдточным.
/12
JIHK 30
I
30 I
/
/ 20
/
/
Фаг. 2
| название | год | авторы | номер документа |
|---|---|---|---|
| Многодвигательный электропривод | 1978 |
|
SU942232A1 |
| Реверсивный вентильный электродвигатель | 1982 |
|
SU1030929A1 |
| Устройство для управления вентильным электродвигателем | 1983 |
|
SU1166255A1 |
| Вентильный электродвигатель | 1985 |
|
SU1259430A1 |
| Устройство для управления вентильным электродвигателем | 1981 |
|
SU1029369A1 |
| Вентильный электродвигатель | 1985 |
|
SU1354351A1 |
| Вентильный электродвигатель | 1974 |
|
SU663034A1 |
| ВЫСОКОСКОРОСТНОЙ БЕСКОНТАКТНЫЙ ЭЛЕКТРОДВИГАТЕЛЬ ПОСТОЯННОГО ТОКА | 1973 |
|
SU398001A1 |
| Устройство для управления вентильным электродвигателем | 1984 |
|
SU1259462A1 |
| Вентильный электродвигатель | 1981 |
|
SU970578A1 |
РЕВЕРСИВНЫЙ ВЕНТИЛЬНЫЙ ЭЛЕКТРОДВИГАТЕЛЬ, содержащий синхронную маш1шу с двумя 
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| САМОЛЕТ | 1924 |
|
SU3980A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
| Под | |||
| ред | |||
| Б | |||
| Н | |||
| Тихменева, М., Транспорт , 1976, с | |||
| Кипятильник для воды | 1921 |
|
SU5A1 |
