эо о:
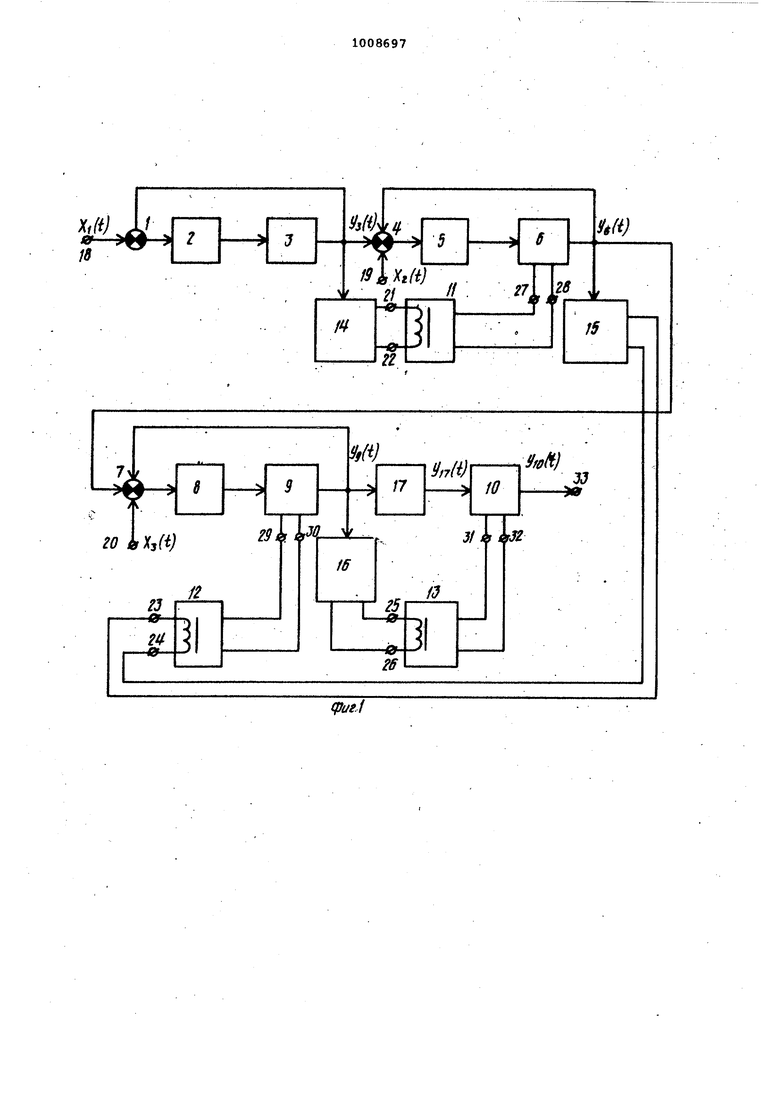
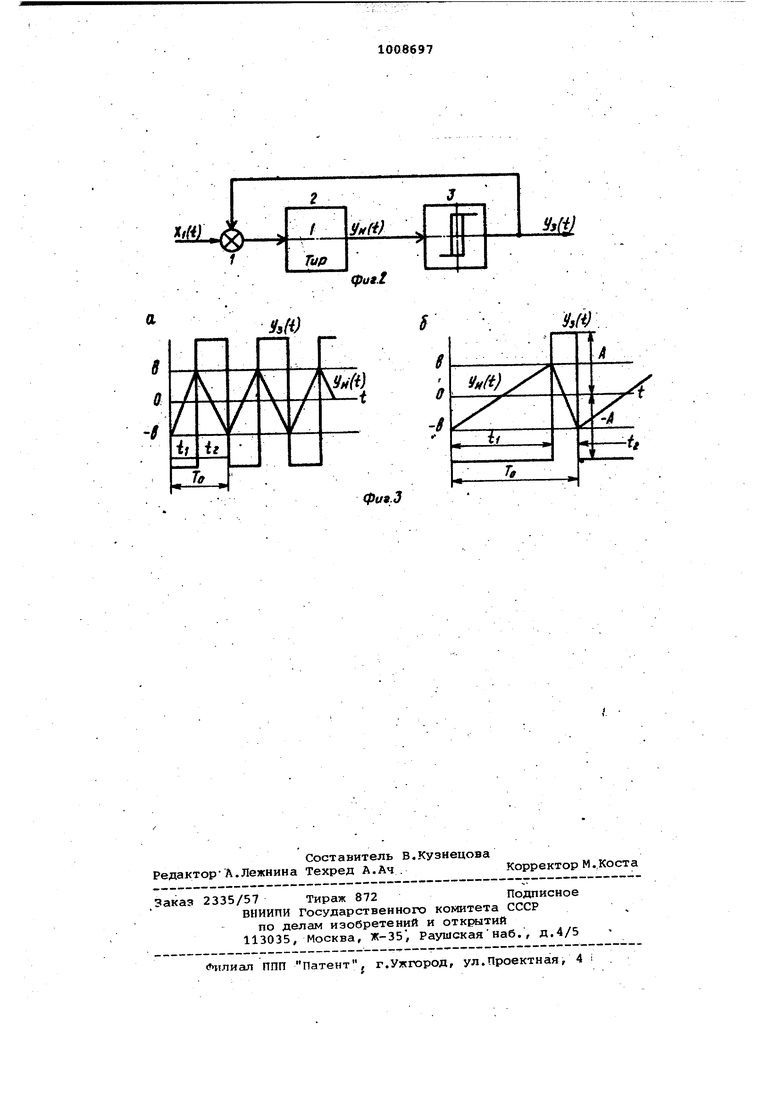
Изобретение относится к электротехнике и предназначено для автомати зации технологических процессов. Известны системы автоматического управления, выполненные, например, по принципу подчиненного регулирова ния параметров, которые представляют собой п-е число последовательно вклю ченных регуляторов, каждый из которых регулирует тот или иной параметр - скорость, ток двигателя и т.д. 1. Регуляторы известных систем автоматического регулирования реализуются на базе .операционных усилителей (ОУ) как правило интегрального испол нения с непосредственной связью между каскадами, вследствие чего характеризуются сравнительно низкой надеж ностью, одной из причин которой явля ется то, что при неработоспособности ОУ его выходной сигнал принимает мак симальное значение. В результате про (исходит срабатывание силовой защитпной аппаратуры, что нежелательно с точки зрения безопасности технолоГического процесса и обслуживающего персонала. , Наиболее близкой к предлагаемой по технической суршости и достигаемому результату является система автоматического управления, выполненна по принципу подчиненного регулирования параметров на базе последовательно вкJBoчeнныx развертывающих опе рационных усилителей, каждый из кото рых состоит из последовательно соеди ненных сумматора, интегратора и реле ного элемента, охваченных обратной связью с выхода релейного элемента н вход сумматора, содержащая выходной релейный элемент и блоки питания релейных элементов . 2 . Развертывающий операционный усили тель в отличие от линейного операционного усилителя работает в режиме устойчивых автоколебаний. Между режи мом автоколебаний и работоспособностью развертывающего операционного усилителя существует однозначная связь. Однако при обычном последовательном включении развертывающих one рационных усилителей, когда его релейный элемент питается от источника постоянного напряжения, надежность системы управления не повышается. ; Цель изобретения - повышение надежности системы автомат.ического управления. Поставленная цель достигается тем что в систему автоматического управления, выполненную,по принципу подчиненного регулирования параметров на базе последовательно включенных развертывающих операционных усилителей, каждый из которых состоит из последовательно соединенных сумматора, интегратора и релейного элемента, охваченных обратной связью с выхода релейного элемента на вход сумматора, содержащую выходной релейный элемент и блоки питания релейных элементов,- введены делители часто,ты, число которых соответствует числу последовательно включенных развертыракщих операционных усилителей, и дифференцирующий трансформатор, при этом.выход каждого из развертывающих операционных усилителей через, соответствующий делитель частоты соединен с блоком питания последующего релейного, элемента, а выход последнего развертывающего операционного усилителя через дифференцирующий тра:нсформ9тор подключен к выходному релейному элементу. .На фиг.1 представлена блок-схема системы автоматического управления (САУ); на фиг.2 - схема развертывающего операционного усилителя; на фиг .З - временные диaгpaм a сигналов, поясняющие принцип работы системы. Система (фиг.1) содержит три разв.ертывающих операционных усилителя, первый из которых включает сумматор 1, интегратор 2 и релейный элемент . 3, второй - сумматор 4, интегратор . 5 и релейный элемент б, а третий сумматор 7, интегратор 8 и релейный элемент 9. Система вк лючает также выходной релейный элемент 10, блоки 11-13 питания релейных элементов, делители 14-16 частоты и дифференцирующий трансформатор 17. Кроме того, на фиг.1 обозначены входные клеммы 18-20 развертывающих операционных усилителей (РОУ), входные клеммы 2126 блоков 11-13 питания, клеммы 2732 для подключения выходов блока 1113 питания релейных элементов 6, 9 и 10, выходная клемма 33 САУ. Клеммл 18-20 предназначены для подключения к соответствующему РОУ сигналов задания или обратной связи.САУ. Система работает следующим образом-. САУ выполнена на базе развертывающих операционных усилителей, представляющих собой автоколебательные каскады с частотно-широтно-импульсной модуляцией. Поскольку принцип действия усилителей идентичен, ограничимся рассмотрением одного из них (фиг. 2} Релейный элемент 3 имеет симметричную характеристику с положительным гистерезисом и порогами переключения iB. Выходной сигналY-j(t}POy неизменен по модулю амплитуды и меняется только по знаку в пределах iА. ПРИ отсутствии сигнала ) на входной клемме 18 релейный элемент 3 совершает цикл переключений с равными интервалами времени t и t
(фиг. За). .Развертка ) на выходе интегратора 2 имеет форму симметричной пилы. Среднее значение импульсов ) за интервал дискретизации Т равно нулю.
Наличие сигнала Х (t) приводит к изменению производной развертки Уц () В интервале времени t имеет место несовпадение знаков сигналов Х (t) и , скорость изменения сигнала Yf,(t) на выходе интегратора 2 определяется разностью токов входного и обратной связи ТОУ, а в интервале времени t - совпадение знаков напряжений ХдН) и Ч (11 ,(3YnU)/dt зависит от суммы соответствующих токов (фиг.35). В результате t tj и среднее значение импульсов ) за время Т(, пропорционально уровню сигнала ХЛ)Делители 14-16 частоты осуществляют преобразование импульсов Y(t) , Yg (t) и Yq (t) в сигналы с периодом 2Т и со средним значением, равным нулю, что необходимо для исключения режима насыщения входных трансформаторов блоков 11-13 питания (). С этой же целью подключение вторичной обмотки блоков 11-13 к выходу делителей частоты осуществляется через разделительный конденсатор, который входит в состав звеньев 14-16 и на фиг.1 не показан.
При работоспособности элементов развертывающих операционных усилителей во вторичной цепи блоков 11-13 питания трансформируется напряжение которое, служит для питания релейных элементов 6, 9 и 10. Дифференцирующий трансформатор 17 .осуществляет дифференцирование фронтов импульсов IJaJt) и управление переключением релейного элемента 10, являющегося аналогом элементов 3., 6 и 9. Сигнал Y.) на выходе САУ (-клемма ЗЗ) полностью повторяет форму импульсов с
выхода релейного элемента 9 (импульсы Yq(t)) . Предлагаемый принцип построения САУ позволяет при любой неисправности- в схеме выполнить условие . Действительно, первый
РОУ фактически ВЕлполняет функции не только преобразователя сигнала Х t) но и источника питания для релейно.го элемента 6 второго РОУ, В случае неработоспособности первого РОУ автоколебания в нем прекращается, выходной сигнал Y(t) принимает одно из фиксировешных значений -1 А или -А , что в свою очередь обеспечивает нулевой сигнал на входе блока 11 и срыв
5 автоколебаний во втором РОУ из-за отсутствия питания у релейного элемецта 6. Отсутствие автоколебаний во втором РОУ приводит к нулевому уровню импульсов (t) на выходе треQ тьего РОУ (элемент 9|. При этом не только дифференцирующие импульсы YiTWO 40 и напряжение питания на клеммах 31 и 32 блока 10 также отсутствует. В результате Y(,
5 причем как на информационном (сигнал 4(7(t.) так и на питающем (клеммы 31 и 32) входах звена 10 отсутствует напряжение,
Таким же образом неработоспособность делителей 14-16 частоты или
0 блоков 11-13 питания вызывает уменьшение до нуля сигнала Yig (t) на выходе САУ. .
Поскольку частота РОУ выбирается г ijaK правило в пределах 10-50 кГц, .то весогаб итныепоказатели САУ из-за наличия допо/1нительных источников питания увеличиваются незначительно. Однако при этом повышается надежность всего комплекса
0 технологического оборудования и уменьшается вероятность срабатывания силовой защитной аппаратуры .изза неисправности в схема:х регуляторов САУ.ИзЮ
да
гь
м.
S
t
| название | год | авторы | номер документа |
|---|---|---|---|
| Система автоматического управления | 1984 |
|
SU1249490A1 |
| Система управления | 1984 |
|
SU1211688A1 |
| УСТРОЙСТВО ДЛЯ ПОТЕНЦИАЛЬНОГО РАЗДЕЛЕНИЯ ЦЕПЕЙ ПОСТОЯННОГО ТОКА | 2011 |
|
RU2469392C1 |
| СИСТЕМА УПРАВЛЕНИЯ ГРУППОЙ АСИНХРОННЫХ ЭЛЕКТРОПРИВОДОВ ВОДЯНЫХ НАСОСОВ | 2003 |
|
RU2251206C2 |
| Развертывающий операционный усилитель | 1985 |
|
SU1260975A1 |
| Система управления | 1979 |
|
SU842722A1 |
| МНОГОЗОННЫЙ ИНТЕГРИРУЮЩИЙ РЕГУЛЯТОР | 2014 |
|
RU2546084C1 |
| ФАЗОСДВИГАЮЩЕЕ УСТРОЙСТВО | 2001 |
|
RU2216846C2 |
| Система управления | 1983 |
|
SU1167578A1 |
| Развертывающий операционный усилитель с непрерывным контролем | 1983 |
|
SU1145350A1 |
СИСТЕМА ЛВТОНАТИЧЕСКО1Х) УПРАВЛЕНИЯ, выполненная по принципу подчиненного регулирования парамет- f ров на базе последовательно включенных .развертывайших операционных уси;лителей, каждый из котЬрых состоит из последовательно соединенных сумматора, интегратора и релейного элемента, охваченных обратной связью с выхода релейного элемента на вход сумматора, содержащая выходной релейный элемент и блоки питания релейнвк элементов, отличающаяся тем, что, с целью повааения надежности системы, в нее .введены делители частоты, число которых соответствует числу последовательно включенных развертывающих операционных усилителей, и дифференцирующий трансформатор, при ртом выход каждого из развертывающих операционных усилителей через соответствующий делитель частоты соединен с блоком питания последукяцего ел релейного элемента, а выход последне го развертывающего операционного усилителя через дифференцирующий трансформатор подключен к выходному релейному элементу.
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Лебедев Е.Д. | |||
| и др | |||
| Управление вентильными электроприводами постоянного тока | |||
| М., Энергия, 1970, с | |||
| ПЕЧНОЙ ЖЕЛЕЗНЫЙ РУКАВ (ТРУБА) | 1920 |
|
SU199A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Щлтович Л.И | |||
| Анализ пульсаций выходного сигнала развертывающих операционных усилителей с различным характером частотно-широтно-импульсной модуляции | |||
| Сб | |||
| Электротехническая промышленность, сер | |||
| Электропривод, вып.3 | |||
