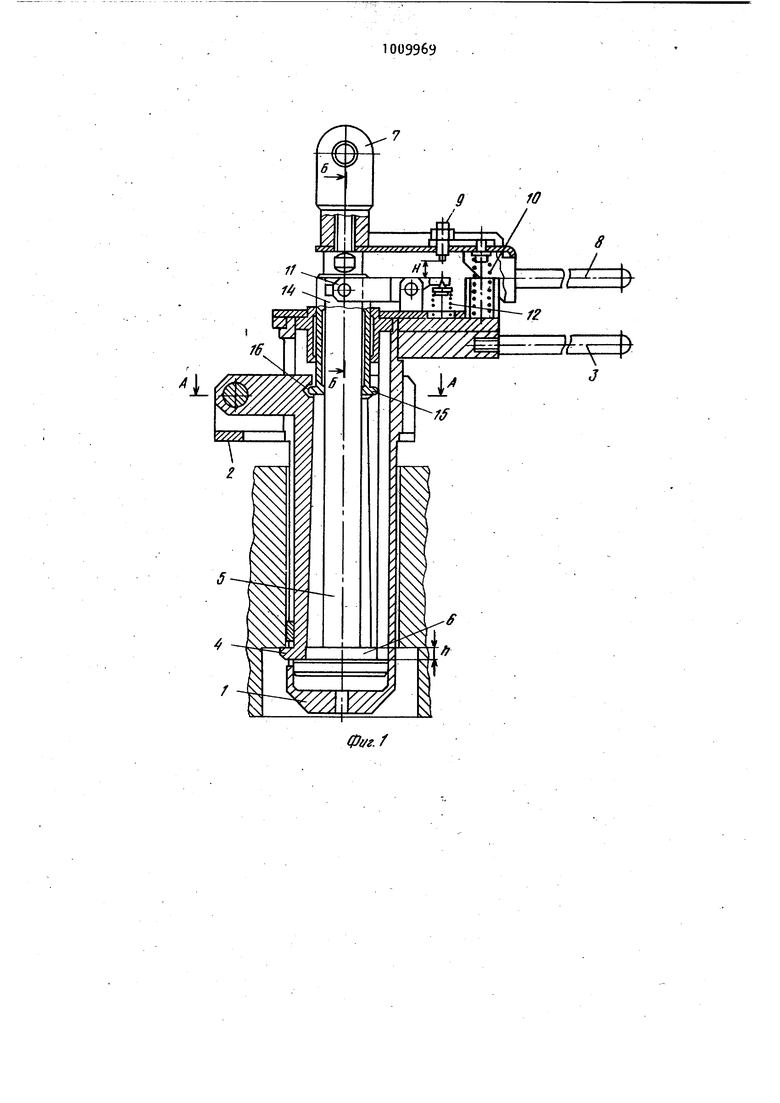
;о со а ;о 1 Изоб.ретение относится к подъемнотранспортному оборудованию, в частности к грузозахватным устройствам. Известно грузозахватное устройство, содержащее корпус, расположенный в нем с возможностью вертикального перемещения ползун собачки, шарнирно закрепленные на корпусе, и рукоятки управления t П Недостатком известного устройства является возможность повреждения изделия при силовом замыкании во время захвата. Целью изобретения является повышение эффективности в эксплуатации путем предотвращения повреждения изделий во время захвата. Для достижения указанной цели грузозахватное устройство, содержаще корпус, расположенный в нем с возмож ностью вертикального перемещения ползун, собачки, шарнирно закрепленные на корпусе и рукоятки управления снабжено охватывающей ползун втулкой соединенной с собачками, шарнирно закрепленным на корпусе рычагом, одн плечо которого подпружинено, а другое связано со втулкой, и закрепленным на одной из рукояток упором для взаимодействия с подпружиненным плечом рычага, при этом ползун в нижней части снабжен ступенчатой головкой для взаимодействия с собачками, высота верхней ступени которой меньше зазора между упором и подпружиненным плечом рычага. На фиг. 1 схематически представле но грузозахватное устройство в рабочем положении; на фиг. 2 - нижняя часть захватного устройства со сведенными собачками; на фиг. 3 разре А-А на фиг. 1; на фиг. k - разрез Б-Б на фиг. 1. Устройство состоит из корпуса 1 с опорным фланцем 2, рукояткой 3 и, по крайней мере, тремя шарнирно закрепленными на нем собачками t. Внут ри корпуса 1 помещен с возможностью вертикального перемещения ползун S, 9 имеющий в нижней части цилиндрическую ступенчатую головку 6 с высотой верхней цилиндрической ступени h. На верхнем конце ползуна 5 укреплена проушина 7 и рукоятка 8, снабженная упором 9 и связанная с корпусом 1 пружиной 10. На корпусе 1 укреплен двуплечий рычаг 11. Один конец рычага 11, подпружиненный пружиной 12, находится на расстоянии Н от упора 9, причем , а второй конец связан пальцами 13 со втулкой . Втулка 14 своим сферическим буртиком 15 входит в кольцевые проточки 16 собачек k. Работа устройства осуществляется следующим образом. Грузозахватное устройство завешивается проушиной 7 на грузоподъемный механизм. Обхватом руки рукоятки 3 и 8 сближаются, сжимая пружину 10, в результате чего ползун 5 движется вниз, пока цилиндрическая ступенчатая головка 6 не освободит собачки 4, затем упор 9 взаимодействует с подпружиненной пружиной 12 концом двуплечего рычага 11. При этом второй его конец пальцами 13 поднимает втулку Н вверх. При движении втулки Ц вверх она своим сферическим буртиком 15 сводит освободившиеся собачки вовнутрь корпуса 1. В таком положении грузозахватное устройство вводится в отверстие изделия до упора во фланец 2, затем рукоятки 3 и 8 освобождаются, при этом в обратном порядке собачки 4 выводятся наружу корпуса 1 и надежно фиксируются в этом положении цилиндрической ступенчатой головкой 6. Для освобождения грузозахватного устрюйства необходимо опустить изделие на основание, сжать рукоятки 3 и 8 и в таком положении вывести его из отверстия изделия. Использование предлагаемого грузозахватного устройства позволяет устранить повреждение изделия при силовом замыкании во время захвата.
10
8
0i/g.f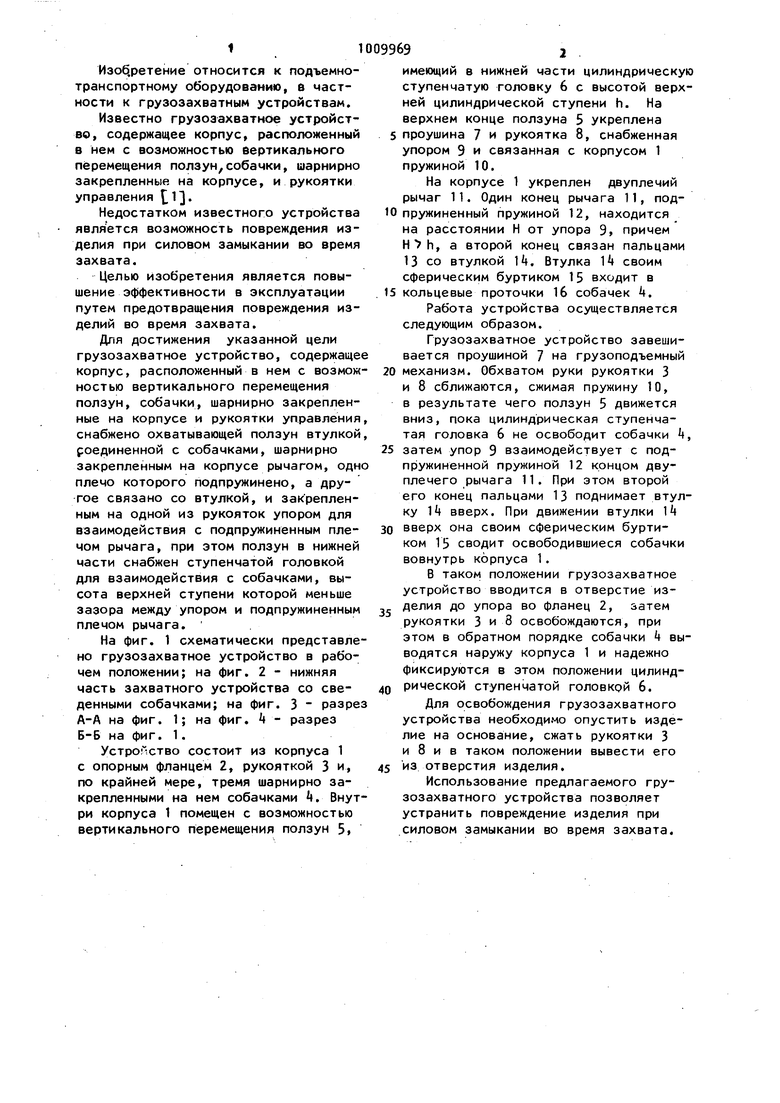
| название | год | авторы | номер документа |
|---|---|---|---|
| Грузозахватное устройство | 1991 |
|
SU1789490A1 |
| СЪЕМНИК | 1992 |
|
RU2050252C1 |
| Грузозахватное устройство | 1989 |
|
SU1712301A1 |
| Захватное устройство для грузов | 1980 |
|
SU965949A1 |
| ГРУЗОЗАХВАТНОЕ УСТРОЙСТВО | 1990 |
|
SU1837563A1 |
| ТРАВЕРСА РЫЧАЖНАЯ С РАЗДВИЖНЫМИ ЗАХВАТАМИ | 2015 |
|
RU2587185C1 |
| Клещевая головка ковочного манипулятора | 1987 |
|
SU1449229A1 |
| Грузозахватное устройство | 1986 |
|
SU1399251A1 |
| ПРОДОЛЬНО-МНОГОРЯДНЫЙ МАГАЗИН И АВТОМАТИЧЕСКИЙ ПИСТОЛЕТ | 1996 |
|
RU2113678C1 |
| Трелевочная каретка подвесной канатной дороги | 1986 |
|
SU1355527A1 |
fj
