Изобретение относится к подъемнотранспортной технике, в частности к грузозахватным устройствам.
Целью изобретения является расширение эксплуатационных возможностей пу)гем уменьшения повреждаемости груза.
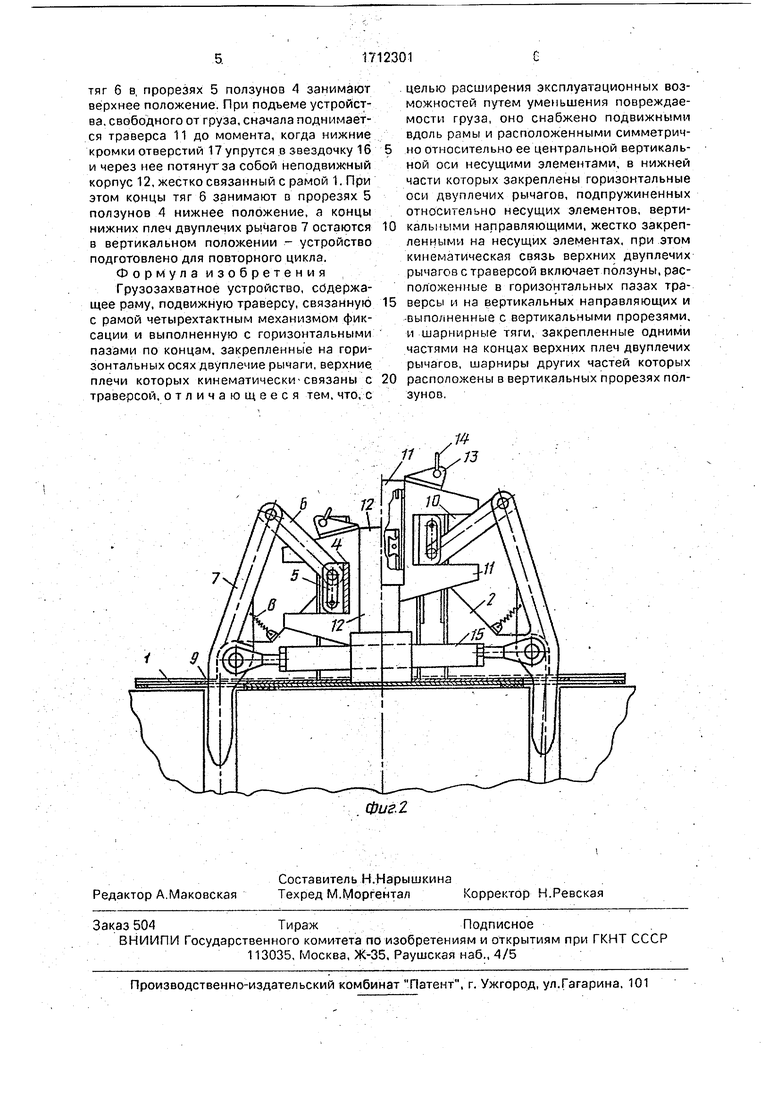
На фиг, 1 показано грузозахватное устройство при захвате груза большого размера; на фиг. 2 - захватное устройство ,в момент захвата груза малого размера.
Грузозахватное устройство содержит раму 1, относительно которой перемещаются несущие элементы 2, которые имеют вертикальные направляющие 3, по которым перемещаются ползуны 4, имеющие вертикальные прорези 5 для расположения в них верхних частей тяг б, другие части которых шарнирно связаны с двуплечими рычагами 7. В средней части двуплечие рычаги 7 шарнирно соединены с соответствующими несущими элементами 2 и зафиксированы вертикально в нижней части пружинами 8. Вращение двуплечих рычагов 7 по часовой стрелке относительно несущих элементов 2 ограничено упорами 9, расположенными на несущих элементах 2. Ползуны 4 входят в пазы 10 подвижной траверсы11 и перемещаются в вертикальном направлении по направляющим 3 несущих элементов 2 вместе с перемещением траверсы 11 вдоль неподвижного корпуса 12 четырехтактного механизма фиксации, жестко связанного в нижней части с рамой 1. В верхней части подвижной траверсы 11 имеются проушины 13 для тросов 14, соединенных с крюком грузоподъемного механизма. Перенастройка грузозахватного устройства для работы с грузом, в частности с рулонами разного диаметра, осуществляется регулировочным винтом 15, имеющим возможность вращаться вокруг своей оси, но закрепленным в своем направлении и выполненным с левой и правой резьбой, шарнирно связанным с несущими элементами 2. При перенастройке несущие элементы 2, двигаясь по раме 1. или сближаются один с другим, или удаляются один от другого, а ползунь) 4 скользят в пазах 10 траверсы 11, причем строго вертикальное положение концов нижних плеч двуплечих рычагов 7 и угол наклона шарнирных тяг 6 остаются неизменными, что позволяет сохранить неизменным передаточное число устройства и, как следствие, постоянную величину усилия зажатия груза на всем диапазоне диаметров перегружаемого груза. Внутри неподвижного корпуса 12 автомата шарнирно закреплена звездочка 16, которая взаимодействуя либо с отверстием 17 траверсы 11, либо с упором 18 траверсы 11, управляет
автоматическим режимом работы устройства при наводке на груз, при автоматическом зажиме и транспортировании груза на м.есто укладки, при освобождении от груза и
5 подготовке к следующему циклу.
Грузозахватное устройство работает следующим образом.
При нацеливании, наводке его на груз звездочка 16.фиксирует подвижную траверсу 11 в положении, когда она не доходит до рамы 1 на некоторое расстояние, части тяг 6 находятся в нижних частях вертикальных прорезей 5 ползунов 4, двуплечие рычаги 7 поджимаются пружинами 8 до упоров 9 на
5 несущих элементах 2, з их нижняя часть занимает вертикальное положение. Для обеспечения беспрепятственного воода концов нижних плеч двуплечих рычагов 7 во втулки рулонов вращением регулировочного винта 15 регулируется положение двуплечих рычагов 7. В конце наводки грузозахвата на груз, когда двуплечие рычаги 7 находятся во втулках рулонов, рама 1 ложится на груз, а траверса 11 продолжает
5 двигаться вниз до крайнего нижнего положения (до соприкосновения с рамой 1). В этот момент упор 18 траверсы 11 разворачивает звездочку 16 в горизонтальное положение. При зажатии груза траверса 11
0 свободно Ькользит вверх вдоль неподвижного корпуса 12 до того момента, когда шарнирные тяги 6 займут положение в нижних частях вертикальных прорезей 5. Двигаясь далее вместе с ползунами 4 вверх, тяги 6
5 начнут поворачивать двуплечие рычаги 7, преодолевая сопротивление пружины 8, в сторону движения друг к другу их нижних концов, до упора их рабочих поверхностей во втулки рулонов до величины, обеспечивающей надежное удержание груза при его подъеме и транспортировании к месту укладки. Во время этой операции нижняя кромка отверстия 17 траверсы 11 разворачивает звездочку 16 в вертикальное положе5 ние. Перед автоматическим освобождением
устройства от груза происходит установка
рулонов на место укладки, траверса 11 под
собственным весом опускается вдоль неподвижного корпуса 12 до соприкосновения
0 с рамой 1. В процессе опускания траверсы 11 вместе с ней опускаются ползуны 4. которые через тяги 6 сначала снимают зажимное усилие с нижних концов двуплечих рычагов 7, а позднее пружины 8 возвращают их в
5 исходное положение (до соприкосновения с упорами 9, при котором нижняя часть двуплечих рычагов 7 занимают вертикальное положение), при этом упор 18 траверсы 11 разворачивает звездочку 16 на некоторый угол от вертикального положения, а концы
тяг б в, прорезях 5 ползунов 4 занимают верхнее положение. При подъеме устройства, свободного от груза, сначала поднимается траверса 11 до момента, когда нижние кромки отверстий 17 упрутся в звездочку 16 и через нее потянут за собой неподвижный корпус 12, жестко связанный с рамой 1. При этом концы тяг 6 занимают в прорезях 5 ползунов 4 нижнее положение, а концы нижних плеч двуплечих рычагов 7 остаются в вертикальном положении - устройство подготовлено для повторного цикла. Фор мула изобретения Грузозахватное устройство, сбдержащее раму, подвижную траверсу, связанную с рамой четырехтактным механизмом фиксации и выполненную с горизонтальными пазами по концам, закрепленные на горизонтальных осях двуплечие рычаги, верхние плечи которых кинематически-связаны с траверсой, отличающееся тем, что, с
целью расширения эксплуатационных возможностей путем уменьшения повреждаемости груза, оно снабжено подвижными вдоль рамы и расположенными симметрично Относительно ее центральной вертикальной оси несущими элементами, в нижней части которых закреплены горизонтальные оси двуплечих рычагов, подпружиненных относительно несущих элементов, вертикальными направляющими, жестко закрепленными на несущих элементах, при этом кинематическая связь верхних двуплечих рычагов с траверсой включает ползуны, расположенные в горизонтальных пазах траверсы и на вертикальных направляющих и -выполненные с вертикальными прорезями, и шарнирные тяги, закрепленные одними частями на концах верхних плеч двуплечих рычагов, шарниры других частей которых расположены в вертикальных прорезях ползунов.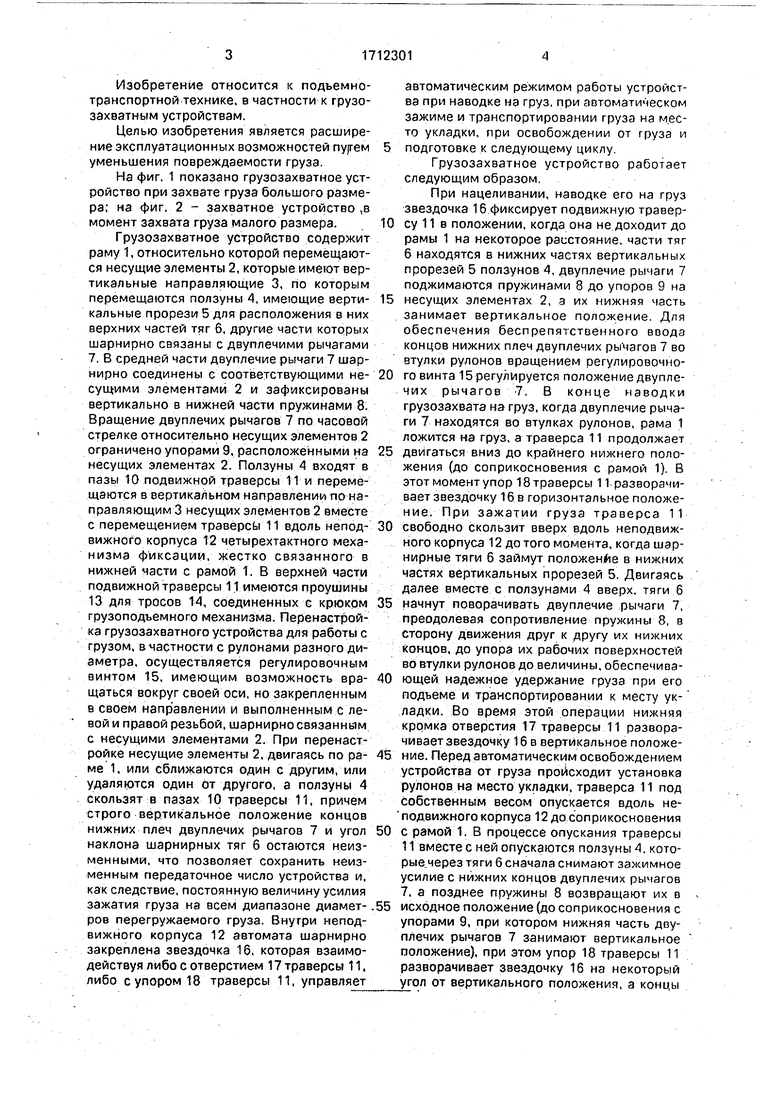
| название | год | авторы | номер документа |
|---|---|---|---|
| Грузозахватная система | 1989 |
|
SU1768491A1 |
| Грузозахватное устройство | 1990 |
|
SU1785989A1 |
| Грузозахватное устройство | 1990 |
|
SU1736904A1 |
| Грузозахватное устройство | 1991 |
|
SU1789490A1 |
| Захватное устройство для штучных грузов | 1981 |
|
SU1065325A1 |
| Штабелер для обслуживания полочных стеллажей | 1982 |
|
SU1031860A1 |
| Грузозахватное устройство | 1989 |
|
SU1687554A1 |
| КРАНОВЫЙ ВИЛОЧНЫЙ ЗАХВАТ | 1966 |
|
SU181797A1 |
| Грузозахватное устройство | 1986 |
|
SU1402537A1 |
| Грузозахватное устройство | 1986 |
|
SU1418268A1 |
Изобретение относится к подъемно- транспортному оборудованию, в част+Юстик грузозахватным устройствам. Целью изобретения является расширение эксплуатационных возможностей путем уменьшения повреждаемости груза. Грузозахватное устройство содержит раму 1. подвижные вдоль нее несущие элементы 2 с вертикальными направляющими 3 для ползунов 4. траверсу 11 с прорезями 5 для ползунов 4, связанных шарнирными тягами 6 с двуплечими рычагами 7. При настройке устройства на размер груза усилие его зажатия остается постоянным за счет наличия ползунов 4. 2 ил.^\^? J^ ^ .105 J ^ел GN5 Сл>& О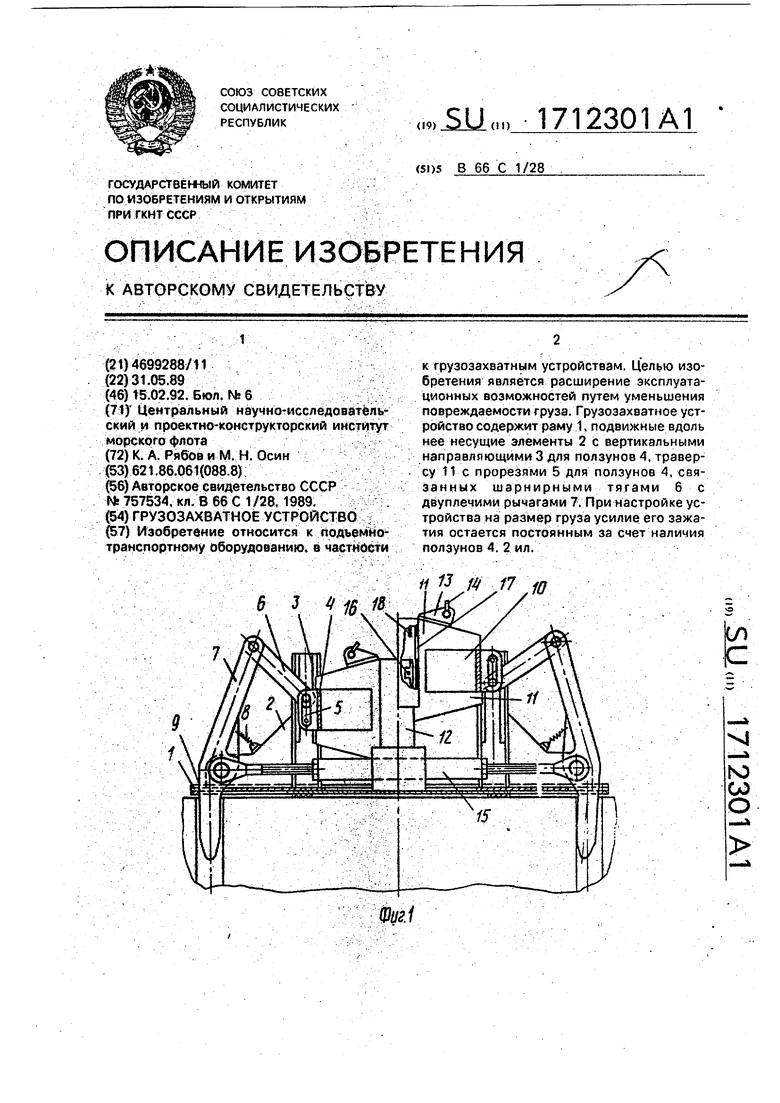
| Авторское свидетельство СССР t* 757534 | |||
| кл | |||
| Приспособление для соединения пучка кисти с трубкою или втулкою, служащей для прикрепления ручки | 1915 |
|
SU66A1 |
| Механизм для сообщения поршню рабочего цилиндра возвратно-поступательного движения | 1918 |
|
SU1989A1 |
