iO
Изобретение относится к подъемно- транспортной технике, в частности к грузозахватным устройствам.
Целью изобретения является повышение удобства работы.
На фиг. 1 показано грузозахватное устройство, общий вид; на фиг. 2 - то же, вид сбоку; на Лиг. 3 - сечение А-А на фиг. 1.
Грузозахватное устройство содержит орган присоединения к подъемной машине 1, установленный на оси 2, тяги 3, двуплечие рычаги 4, шарнирно соединенные при помощи осей 5, 6 и 7, зажимные элементы 8 и пластины 9, соединенные между собой с двуплечими рычагами 4, механизм 10 фиксации положения двуплечих рычагов 4, который одним концом шарнирно соединен с осъю 6, а другим, образующим упоры 11 и ограничителъ 12, свободно опирается на ось 7. Собачки 13 на шарнирах 14 осуществляют колебание относительно вертикального положения. Кроме того устройство содержит упор в виде полой штанги 15, нижняя часть которого заканчивается .П-образным рабочим элементом 16, а верхняя - ограничителем
17,шарнирно соединенным с осью 5 при помощи вертикальной направляющей
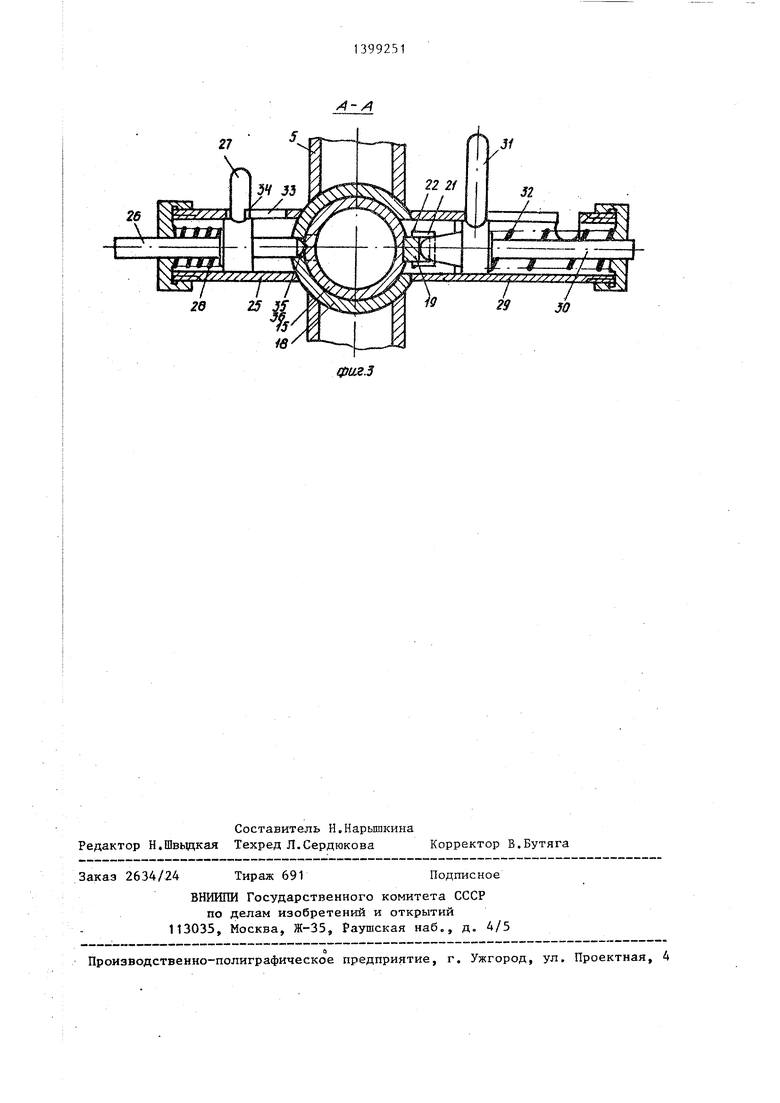
18,с горизонтальными выступами 19, с наклонной нижней поверхностью 20. На боковой поверхности штанги 15 закреплены рамки 21 на шарнирах 22. На вертикальной направляющей 18 закреплены средства фиксации постоянного действия 23 и циклического действия 24. Средство 23 фиксации постоянного действия содержит горизонтальный корпус 25, упор 26 с рукояткой 27, пружину 28. Фиксатор 24 1щклического действия содержит корпус 29, упор 30 с рукояткой 31, пружину 32.
Грузозахватное устройство работает следующим образом.
При настроенном в исходное положение устройства ось 7 взаимодействует с упором 11 (фиг.1), упор 26 средства 23 фиксации выведен в нейтральное положение, для чего рукоятка 27 через Г-образную прорезь 33, вьшолнен- ную в корпусе 25, устанавливается до упора 34, при этом конус 35,упор .26 и продольный паз 36, выполненный по наружной поверхности штанги 15, исключают возможность проворачивания последнего вокруг своей оси; средство 24 фиксации циклического действия
5
0
включено в работу, при этом упор 30 прижимается к выступам 19 прухсиной 32, с помощью подъемной мггшины опускается на груз. Штанга 15, соприкоснувшись с его поверхностью, останавливается. Устройство продолжает опускаться еще ниже. Вертикальная направляющая 18 скользит по поверхности штанги 15, а упор 30, взаимодействуя с рамками 21, совершает возвратно- поступательное движение и не препятствует дальнейшему опусканию устройства. При достижении нужной высоты включается реверс машины, и устройство приподнимается вверх. Торец упора 30 приподнимает ближайшую к нему рамку 21 и занимает положение между последней и соответственным выступом 19. Включается реверс подъемной машины, и устройство опускается. Упор 30, взаимодействуя с гори зонтальной поверхностью выступа 19, препятствует опусканию устройства 5 вниз, при этом шарнирный параллелограмм, образовании тягами 3 и рычагами 4, складывается по вертикали. Ось 7 и механизм 10 фиксации взаимно перемещаются. При этом первая, воздействуя на собачку 13, отклоняет ее вправо и перемещается в сторону ограничителя 12. Собачка 13, освободившись от воздействия оси 7, возвращается в исходное положение. Вновь включается реверс, устройство поднимается вверх,,рычаги сжимаются, ось 7 перемещается влево воздействуя на собачку 13, приподнимая механизм 10 фиксации вверх и минуя упор 11, продолжает двигаться до момента полного захвата груза рычагами 4. При опускании груза на опорную плоскость рычаги 4 раздвигаются и освобождают его. При этом крюк машины продолжает опускаться, и ось 7, двигаясь вправо, занимает положение между ближайшим к ней упором 11 и собачкой 13. Включается реверс грузоподъемной машины, устройство поднимается, ось 7, перемещаясь влево и взаимодействуя с упором 11, фиксирует рычаги 4 в раскрытом положении. Штанга 15, контактируя с поверхностью груза, остается- неподвижной до момента взаимодействия вертикальной направляющей 18 с ограничителем 17, после чего увлекается, и цикл повторяется. С целью постоянной фиксации штанги 15 на определенной высоте используется сред0
5
0
5
0
5
313
ство 23 фиксации постоянного действия. При этом средство 24 фиксации циклического действия вьгоодится в нейтральное положение путем перемещения рукоятки 31, При этом упор 26 под действием пружины 28 совмещается с соответствующим отверстием 37 штанги 15 и фиксирует его в нужном положении .
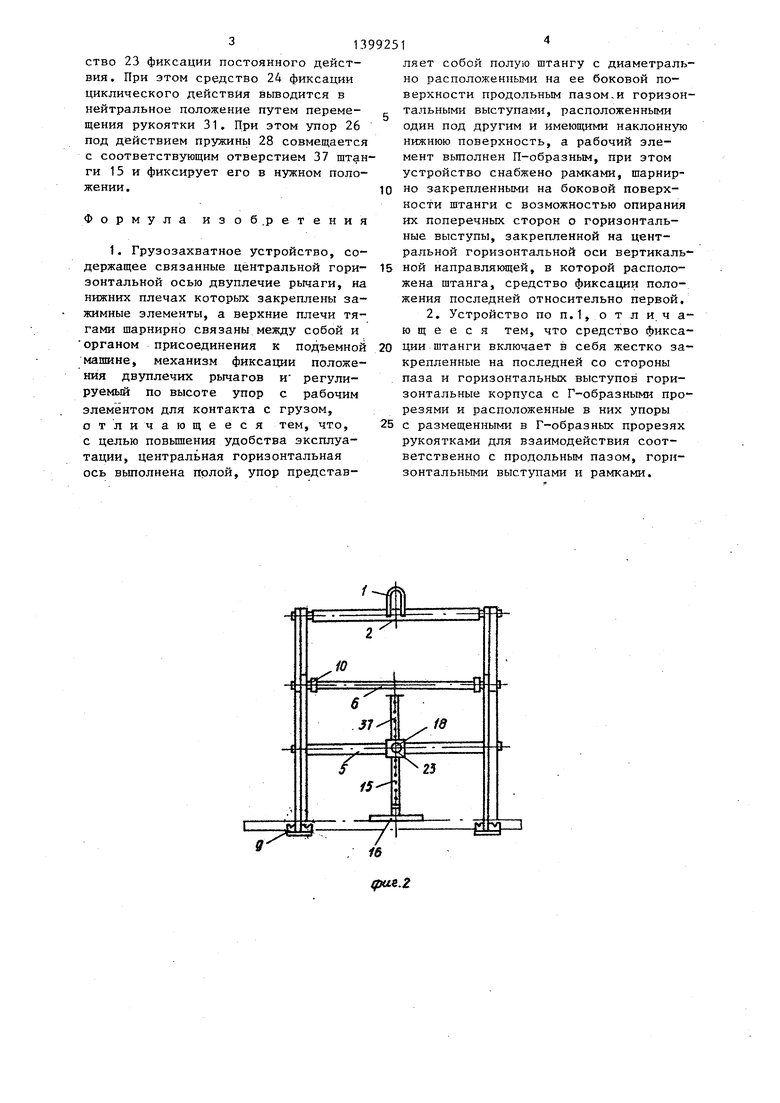
Формула изоб.ретения
1. Грузозахватное устройство, содержащее связанные центральной гори- зонтальной осью двуплечие рычаги, на нижних плечах которых закреплены зажимные элементы, а верхние плечи тягами шарнирно связаны между собой и органом присоединения к подъемной машине, механизм фиксации положения двуплечих рычагов и регулируемый по высоте упор с рабочим элементом для контакта с грузом, отличающееся тем, что, с целью повьшения удобства эксплуатации, центральная горизонтальная ось выполнена полой, упор представляет собой полую штангу с диаметрально расположенными на ее боковой поверхности продольным пазом,и горизонтальными выступами, расположенными один под другим и имеющими наклонную нижнюю поверхность, а рабочий элемент выполнен П-образным, при этом устройство снабжено рамками, шарнирно закрепленньми на боковой поверхности штанги с возможностью опирания их поперечных сторон о горизонтальные выступы, закрепленной на центральной горизонтальной оси вертикальной направляющей, в которой расположена штанга, средство фиксации положения последней относительно первой,
2. Устройство по П.1, о т л и ч а- ю щ е е с я тем, что средство фиксации штанги включает в себя жестко закрепленные на последней со стороны паза и горизонтальных выступов горизонтальные корпуса с Г-образными прорезями и расположенные в них упоры с размещенными в Г-образных прорезях рукоятками для взаимодействия соответственно с продольным пазом, горизонтальными выступами и рамками.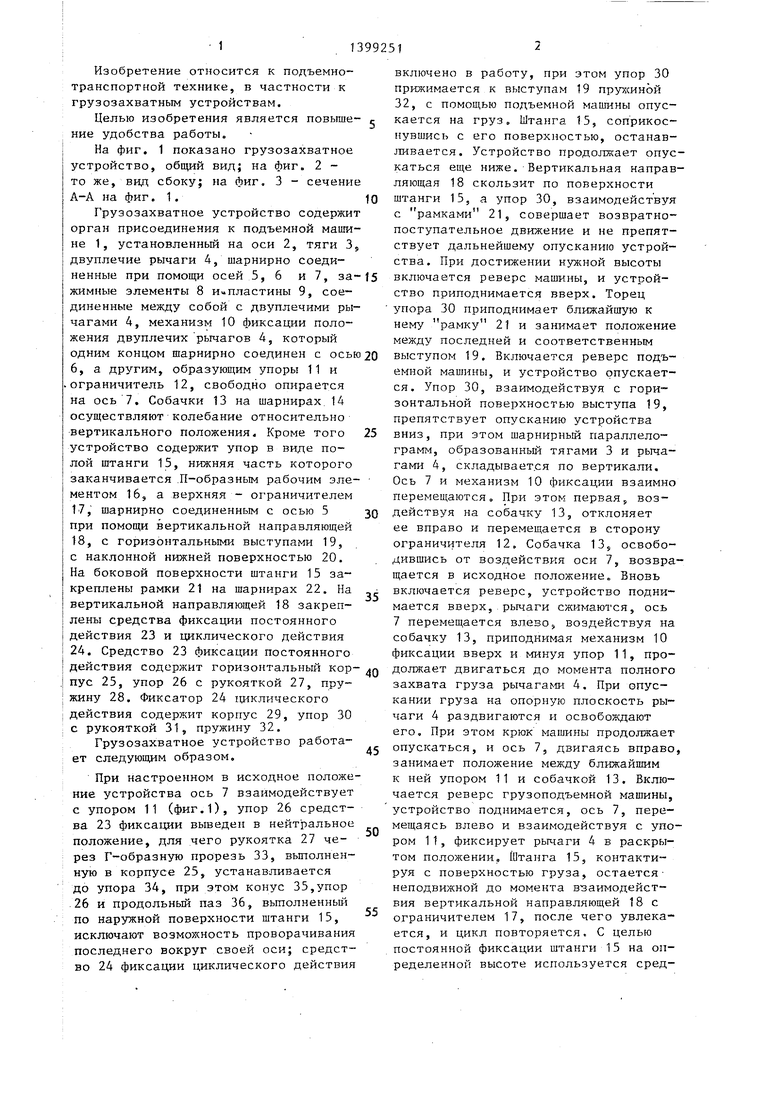
| название | год | авторы | номер документа |
|---|---|---|---|
| Грузозахватное устройство | 1987 |
|
SU1472409A1 |
| Грузозахватное устройство | 1986 |
|
SU1392018A1 |
| Грузозахватное устройство | 1990 |
|
SU1787924A1 |
| КРАН-МАНИПУЛЯТОР МЕТАЛЛОВОЗНЫЙ | 1998 |
|
RU2140367C1 |
| Грузозахватное устройство | 1986 |
|
SU1390165A1 |
| Грузозахватное устройство | 1986 |
|
SU1532506A1 |
| Захватное устройство для изделий с конусной вертикальной полостью | 1990 |
|
SU1740303A1 |
| Механизм фиксации положения рычагов грузозахватного устройства | 1986 |
|
SU1381056A1 |
| Вилочный захват подъемно-транспортной машины | 1984 |
|
SU1266836A1 |
| Грузозахватное устройство | 1987 |
|
SU1495264A1 |
Изобретение относится к подъемно-транспортной технике, в частности к грузозахватным устройствам. Целью изобретения является повьшение удобства работы. Грузозахватное устройство содержит упор, вьтолненный в виде полой штанги 15 с горизонтальными выступами 19, шарнирно соединенной с осью 5, и упоры 26 и 30, 1 з.п.ф-лы. 3 ил.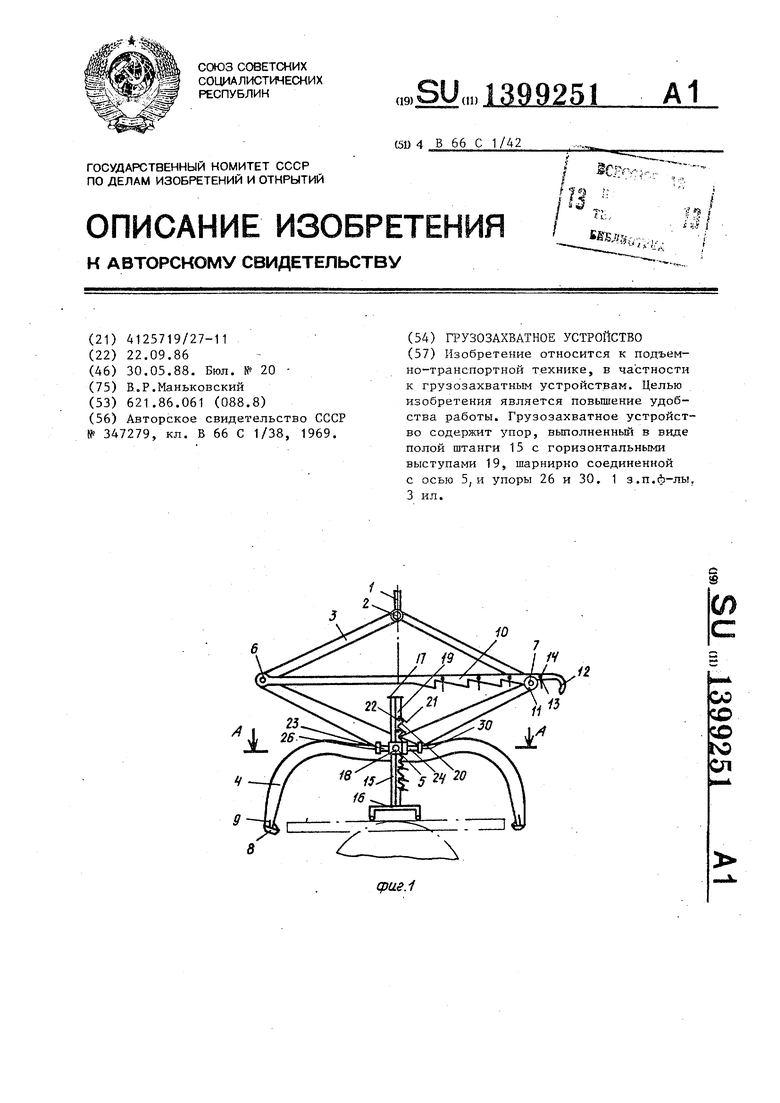
(ра&,2
27
1в
| АВТОМАТИЧЕСКИЙ ЗАХВАТ | 0 |
|
SU347279A1 |
| Приспособление для соединения пучка кисти с трубкою или втулкою, служащей для прикрепления ручки | 1915 |
|
SU66A1 |
