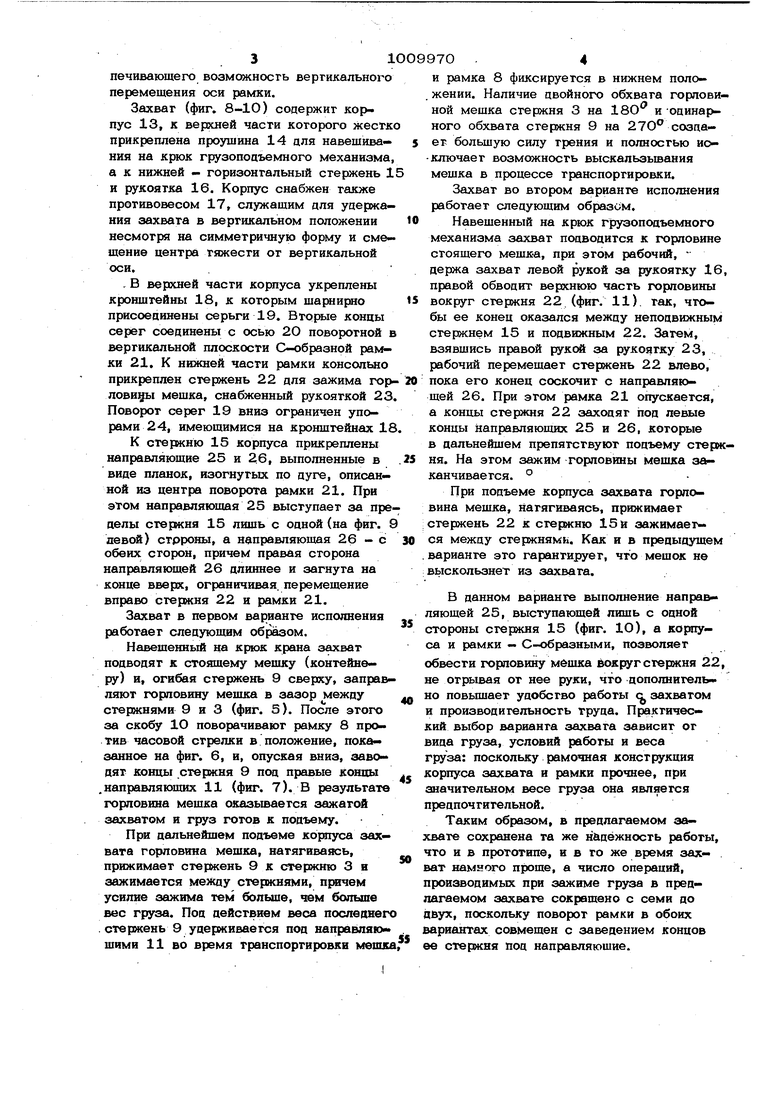
Изобрегеиие относится к подъемнотранспортным механизмам, в частности к захватным устройствам для работы с тарой типа мешка или контейнера, изготовленного из мягкого материала (полиэтилена, нитепрошивного полотна и т.п.). Известно захватное устройство аля мешков, содержащее треугольную рамку для изогнутой в виде петли верхней части мешка и штырь, размешенный в указанной петле, причем штырь выполнен с отогнутым концом, препятствующим проворачиванию штыря С 1 . Недостатком такого усгройсгва является неудобство обслуживания, так как перед тем, как зажать горловину мешка, последняя должна быть пропущена через , рамку, обведена вокруг штыря, а затем снова пропущена через рамку снизу, в обратном направлении. К тому же, до начала подъема мешка штырь нужно удер живать рукой, иначе он может провернут ся или выпасть из петли, следовательно, рабочий должен находиться в момент подъема груза обязательно около мешка, что не всегда целесообразно по соображениям техники безопасности и технологии погрузочно-разгрузочных работ. Наиболее близким к предлагаемому техническому решению является захват для грузов в мягкой таре, содержаший корпус с горизонтальной опорой в его нижней части и рамку, один конец которой посредством горизонтальной оси соединен с корпусом, а другой - имеет горизонтальный стержень 2 3 Этот захват обеспечивает подъем ука занных грузов без риска их выскальзыва ния, однако он сложен по конструкции и в обслуживании. Так, для того, чтобы за жать этим захватом горловину мешка, нужно выполнить семь операций, и стол ко же для освобождения мфика. Целью изобретения является упрощен конструкции захвата и облегчение его обслуживания. , Поставленная цель достигается тем, что в захвате, содержащем корпус с горизонтальной опорой в его нижней части и рамку, один конец которой посредство горизонтальной оси соединен с корпусом а другой имеет горизонтальный стержен рамка размещена внутри корпуса, ось установлена на корпусе с возможностью вертикального перемещения, а корпус снабжен криволинейными направляющими для концов стержня рамки. Корпус снабжен кронштейном и прикрепленной к нему поворотной в вертикальной плоскости серьгой, ось рамки закреплена на свободном конце серьги, а.корпус и рамка выполнены С-образными. На фиг. 1 - схематически показан предлагаемый захват, вид спереди; на фиг. 2 - то же, вид сбоку; на фиг. 3 разрез А-А на фиг. 1; на фиг. 4 - разрез Б-Б на фиг. 1; на фиг. 5 - захват в начальный момент зажима груза; на фиг. 6 - то же, в момент перевода рамки в рабочее положение; на фиг. 7 - захват после фиксации рамки в рабочем положении; на фиг. 8 - исполнение захвата С-образным, вид спереди; на фиг. 9 то же, вид сбоку; на фиг. 10-разрез С-С на фиг. 8; на фиг. 11 - начальный момент зажима горловины мешка; на фиг. 12 конечный момент зажима горловины мешка. Корпус первого варианта предлагаемого захвата состоит (фиг. 1-4) из верхней планки 1, боковых стержней 2 и нижнего Г9ризонтального стержня 3 с рукоятками 4, К планке 1 жестко прикреплена проушина 5 для навешивания на крюк грузоподъемного механизма. На стержнях 2 корпуса, служащих вертикальными направ- ляюшими, установлены с возможностью вертикального перемещения ползуны 6, к которым шарнирно присоединена ось 7 размешенной внутри корпуса рамки 8, состоящей из двух параллельно расположенньос боковин, к нижнему концу которых прикреплен стержень 9. К средней части рамки 8 прикреплена скоба 10 для ее поворота. К стержню 3 корпуса сверху жестко прикреплены направляющие 11, изогнутые по дуге, описанной из центра поворота рамки 8. Направляющие 11 расположены под концами стержня 9 и выступают за пределы стерокня 3 с одной стороны (на фиг. 2 справа) на величину, несколько цревьш1аюшую диаметр стержня 9, а с другой стороны - на величину предельного отклонения стержня 9 в нерабочем пс ложении рычага, показанном на фиг. 2. Левый конец направляющих 11 загнут вверх/ ограничивая перемещение стеркня 9. На стержнях 2 имеются упоры 12, ограничивающие перемещение ползунов 6 вниз. Второй вариант предлагаемого захвата отличается формой корпуса и поворотной рамки, которые выполнены С-образными, а также конструкцией узла, обеспечивающего возможносгь вергикального перемещения оси рамки.
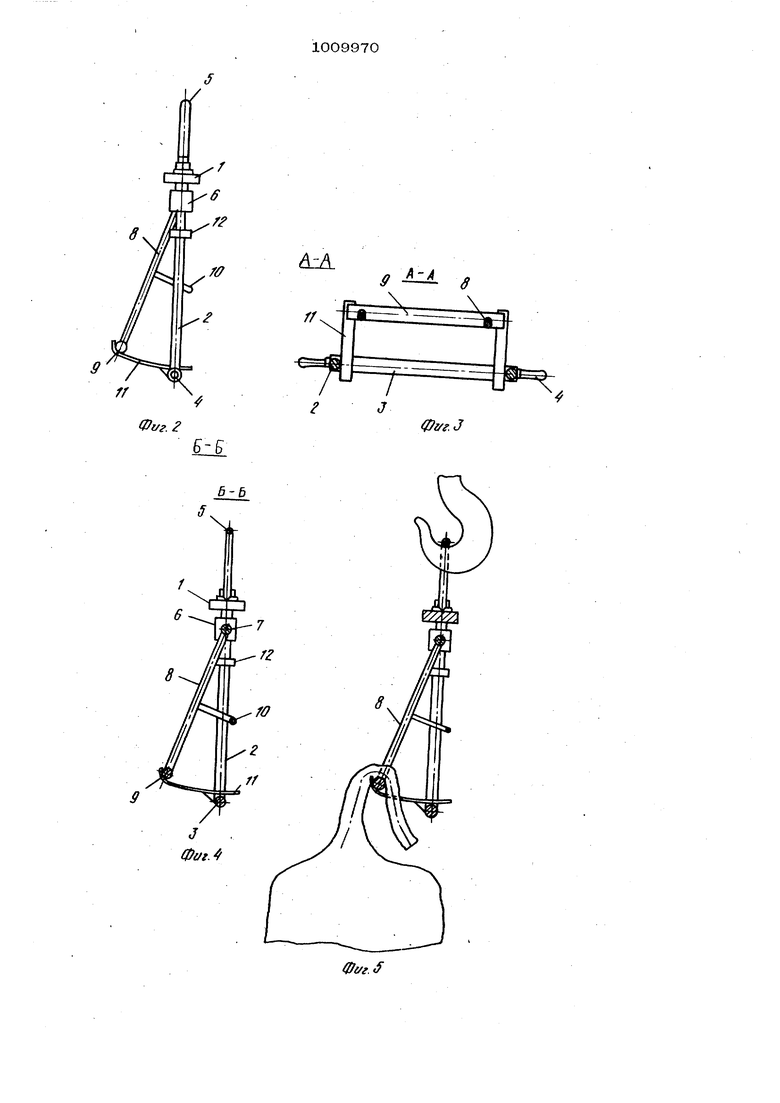
Захваг (фиг. 8-10) содержиг корпус 13, к верхней части которого жестко прикреплена проушина 14 для навешивания на крюк грузоподъемного механизма, а к нижней - горизонтальный стержень 15 и рукоятка 16. Корпус снабжен также противовесом 17, служашим для удержания захвата в вертикальном положении несмотря на симметричную форму и смешение центра тяжести от вертикальной оси.
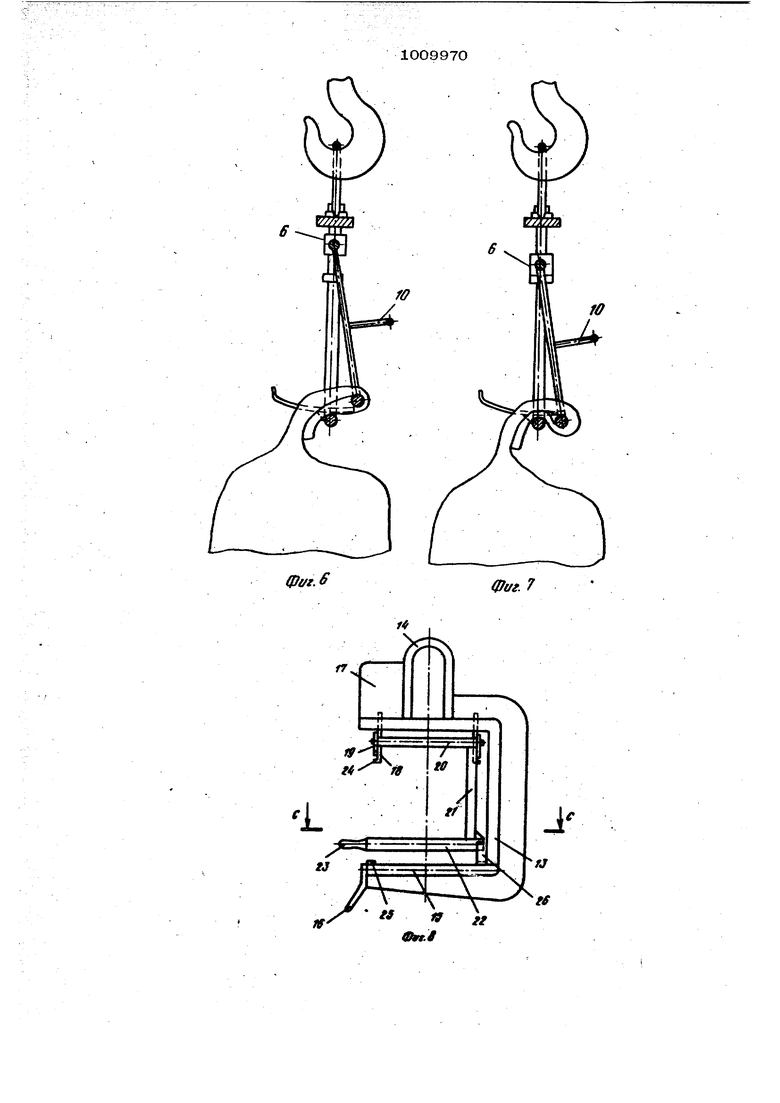
. В верхней части корпуса укреплены кронштейны 18, к которым шарюирно присоединены серьги 19. Вторые концы серег соединены с осью 20 поворотной в вертикальной плоскости С-юбразной рам ки 21, К нижней части рамки консольно прикреплен стержень 22 для зажима го( мешка, снабженный рукояткой 23 Поворот серег 19 вниз ограничен упорами 24, имеющимися на кронштейнах 1 К стержню 15 корпуса прикреплены направляющие 25 и 26, выполненные в виде планок, изогнутых по дуге, описанной из центра поворота рамки 21. При этом направляюшая 25 выступает за пре делы стеркня 15 лишь с одной (на фиг. левой) стрроны, а направляющая 26 - с обеих сторон, причем правая сторона направляющей 26 длиннее и загнута на конце вверх, ограничивая, перемещение вправо стержня 22 и рамки 21. Захват в первом варианте исполнения работает следующим образом. Навешенный на крюк крана захват подводят к стоящему мешку (контейнеру) и, огибая стержень 9 сверху, заправ ляют горловину мешка в зазор между стержнями 9 и 3 (фиг. 5). После этого за скобу 1О поворачивают рамку 8 против часовой стрелки в положение, показанное на фиг. 6, и, опуская вниз, заводят концы стержня 9 под правые концы .направляющих 11 (фиг. 7). В результате горловина мешка оказывается зажатой захватом и груз готов к подъему. При дальнейшем подъеме корпуса захвата горловт1а мешка, натягиваясь, прижимает стержень 9 к стержню 3 н зажимается между стержнями, пртгаем усилие зажима тем больше, чем больше вес груза. Под действием веса послеонег . стержень 9 удерживается под направляю шимн 11 во время транспортировки мешк
и рамка 8 фиксируется в нижнем положении. Наличие двойнохх обхвата горловиной мешка стержня 3 на 180 и -одинар ного обхвата стержня 9 на созда-
ег большую силу трения и полностью исключает возможность выскальзьюания мешка в процессе транспортировки.
Захват во втором варианте исполнения работает следующим образом.
Навешенный на крюк грузоподъемного механизма захват подводится к горловине стоящего мешка, при этом рабочий, держа захват левой рукой за рукоятку 16, правой обводит верхнюю часть горловины
вокруг стержня 22 (фиг. 11). так, чтобы ее конец оказался между неподвижным стержнем 15 и подвижным 22. Затем, взявшись правой руксй за рукоятку 23, рабочий перемешает стержень 22 влево, пока его конец соскочит с направляющей 26. При этом рамка 21 опускается, а концы стержня 22 заходят под левые концы направляющих 25 и 26, которые в дальнейшем препятствуют подъему стеркня. На этом зажим горловины мешка заканчивается. При подъеме корпуса захвата горловина мешка, натягиваясь, прижимает : стержень 22 к стержню 15 и зажимается между стержнями. Как и в предыдущем .варианте это гарантирует, что мешок не вьтскользнет из захвата. В данном варианте выполнение направляющей 25, выступающей лишь с одной стороны стержня 15 (фиг. 10), а корпуса и рамки - С-образными, позволяет обвести горловину мбшка ёокругстержня 22, не отрывая от нее руки, что дополнительно повышает удобство работы cj захватом и производительность труда. Практический выбор варианта захвата зависит от вида груза, условий работы и веса груза: поскольку рамочная конструкция корпуса захвата и рамки прочнее, при значительном весе груза она является предпочтительной. Таким образом, в предлагаемом захвате сохранена та же надёжность работы, что и в прототипе, и в то же время захват намного проще, а число операций, производимых при зажиме груза в предлагаемом захвате сокращено с семи до двух, поскольку поворот рамки в обоих вариантах совмешен с заведением концов ее стеркня под направляющие.
dizi
///
г
S

| название | год | авторы | номер документа |
|---|---|---|---|
| Захват для грузов в мягкой таре | 1978 |
|
SU802162A1 |
| Грузозахватное устройство дляМягКиХ КОНТЕйНЕРОВ | 1978 |
|
SU846489A1 |
| Устройство для захвата заполненных мешков | 1990 |
|
SU1761610A1 |
| Захватное устройство для грузов в мешках | 1983 |
|
SU1129167A1 |
| Устройство для захвата горловины мешка | 1984 |
|
SU1390168A1 |
| ПАССАЖИРСКИЙ МИНИ-ЛИФТ | 1992 |
|
RU2081047C1 |
| Захватное устройство для изделий с отверстием | 1985 |
|
SU1364593A1 |
| Тележка для бобин | 1988 |
|
SU1569276A1 |
| Захват-раскладчик | 1980 |
|
SU948835A1 |
| УСТРОЙСТВО ПОГРУЗКИ-ВЫГРУЗКИ ГРУЗА НА ПОДВОДНОМ ТЕХНИЧЕСКОМ СРЕДСТВЕ | 2010 |
|
RU2422319C1 |
1. ЗАХВАТ ДЛЯ ГРУЗОВ В МЯГКОЙ ТАРЕ, соаержаший корпус с горизонтальной опорой в его нижней чао- ти и рамку, оаин конец которой посреаством горизонтальной оси соединен с корнпусом, а другой имеет горизонтальный стержень, отличающийся тем, что, с целью упрощения конструкции захва- та и облегчения его обслуживания, рамка размещена внутрда корпуса, ось установлена на корпусе с возможностью вертикаль- . ного перемещения, а кортус снабжен криволинейными направляющими аля концов стержня рамки. 2. Захват по п. 1, о т л и ч а ю щ и и с я тем, что корпус снабжен Крон- щтейном, прикрепленной к нему поворотной в вертикальной плоскости серьгой, ось рамки закреплена на свободном конце серьги, а корпус и рамка выполнены С-образными.о (/} ,f
д-Ь
Фиг.
(pi/f.S
Фиг. 7
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Приспособление для соединения пучка кисти с трубкою или втулкою, служащей для прикрепления ручки | 1915 |
|
SU66A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Топка с несколькими решетками для твердого топлива | 1918 |
|
SU8A1 |
| Приспособление для соединения пучка кисти с трубкою или втулкою, служащей для прикрепления ручки | 1915 |
|
SU66A1 |
