(54) ЗАХВАТ ДЛЯ ГРУЗОВ В МЯГКОЙ ТАРЕ
| название | год | авторы | номер документа |
|---|---|---|---|
| Захват для грузов в мягкой таре | 1981 |
|
SU1009970A1 |
| Захватное устройство для грузов в мешках | 1988 |
|
SU1533998A1 |
| Устройство для захвата горловины мягкой тары | 1980 |
|
SU912596A1 |
| Устройство для захвата заполненных мешков | 1990 |
|
SU1761610A1 |
| Устройство для захвата заполненных мешков | 1983 |
|
SU1174333A1 |
| ГРУЗОЗАХВАТНОЕ УСТРОЙСТВО ДЛЯ ПОДЪЕМА И ТРАНСПОРТИРОВАНИЯ ЦИЛИНДРИЧЕСКИХ ГРУЗОВ | 2015 |
|
RU2595204C1 |
| Грузозахватное устройство дляМягКиХ КОНТЕйНЕРОВ | 1978 |
|
SU846489A1 |
| Устройство для перевозки, хранения и выдачи грузов | 1976 |
|
SU789334A1 |
| Грузозахватное устройство | 1990 |
|
SU1736904A1 |
| ЗАХВАТ-КАНТОВАТЕЛЬ ДЛЯ ГРУЗОВ ЦИЛИНДРИЧЕСКОЙ ФОРМЫ С ЦЕНТРАЛЬНЫМ ОТВЕРСТИЕМ | 1994 |
|
RU2116239C1 |

Изобретение относится к захватам для штуч ных грузов, а именно для работы с тарой типа мешка или контейнера, изготовленной из мягкого материала, например полиэтилена, нитепрошивного и т.п. полотна. Для удержания груза в подвешенном положении и производства погрузочно-разгрузочных работ использую ся силы трения. Известен захват для грузов в мягкой таре, содержащий корпус и зажимные рычаги исполь зующий силу трения для производства работ с аналогичной тарой. Однако зтот захват громоздок и сложен в изготовлении и неудобен в эксплуатации 1. Известен также захват, содержащий навешиваемый на крюк крана корпус, боковые рычаги, одно плечо каждого из которых жестко закреплено на общей поворотной горизонтальной оси, и неподвижную горизонтальную ось 2. В этом захвате зажим горловины мешка происходит по линии соприкосновения корпуса с подвижной частью, щарнирно закрепленной на рычагах, причем с тем большой силой, чем больше вес поднимаемого груза. При подъеме груза весом 1000 кг и более, размещенного в мешках (контейнерах) из полимерного материала, в местах зажима горловины мешка возникают силы трения большой величины, что приводит к нагреву и разрыву материала по линии зажима, а при подъеме груза меньшего веса происходит выскальзывание горловины мешка из зажима. Кроме того, для заправки горловины мешка в подвешенный на крюке грузоподъемного механизма зажим рабочему необходимо поднять весь корпус захвата, что также создает неудобства в работе. Целью изобретения является повышение надежности работы захвата. Указанная цель достигается тем, что на вторых плечах рычагов шарнирно закреплена П-образная рамка с рукоятками, ось рычагов установлена в корпусе с возможностью горизонтального перемещения, а на боковой поверхности корпуса закреплена. ограничительные упоры и палец, взаимодействующий с одним из рычагов.
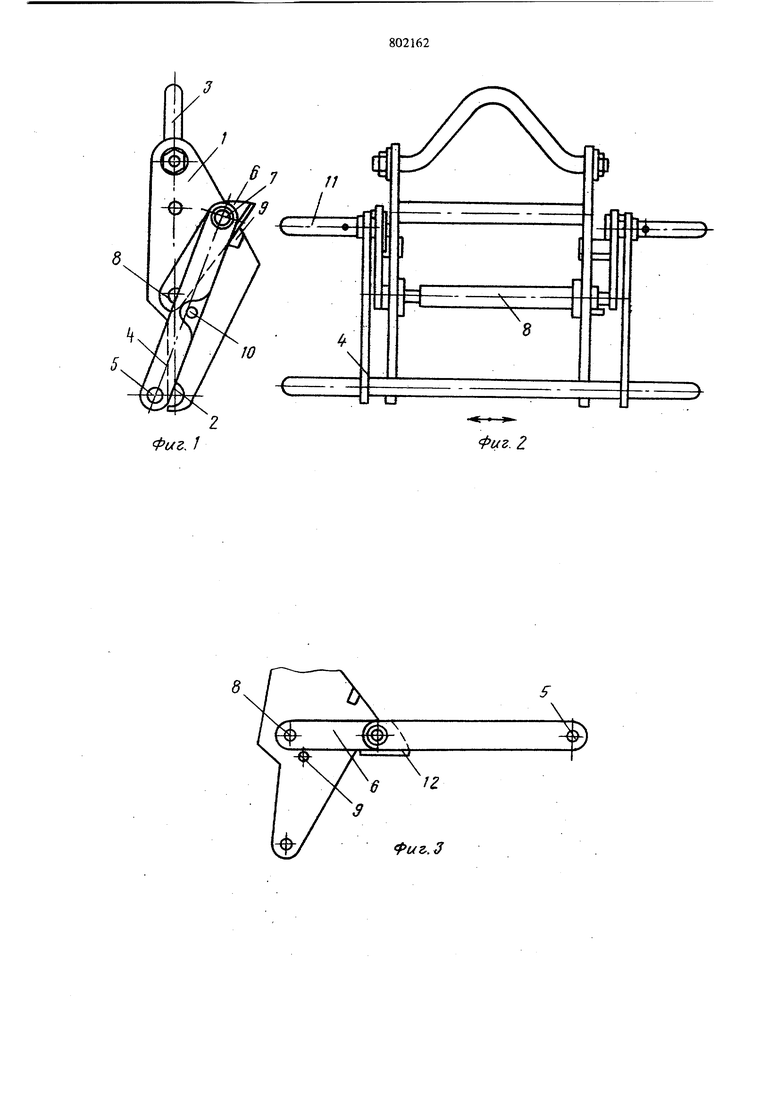
На фиг. 1 показан общий вид захвата в закрытом положении без горловины контейнер на фиг. 2 - то же, вид сбоку; на фиг. 3 захват в исходном положении; на фиг. 4 захват во время заправки в него горловины контейнера; на фиг. 5 - захват во время обхвата горловины контейнера; на фиг. 6 - захват в закрытом положении с горловиной контейнера.
Захват содержит корпус I с неподвижной горизонтальной осью 2, серьгу 3 для подвешивания захвата на крюк грузоподъемного механизма, поворотную П-образную рамку 4 с перемычкой 5, соединенную с боковыми рычагами 6 посредством шарниров 7. Боковые рычаги 6 своими вторыми концами закреплены на поворотной горизонтальной оси 8, которая установлена в корпусе с возможностью бокового перемещения.
На стенках корпуса с двух его сторон закреплены упоры 9, а с одной стороны палец 10. П-образная рамка имеет рукоятку 11, а рычаги 6 выполнены с полками 12.
Захват работает следующим образом.
Захват за серьгу 3 подвешивают на крюк грузоподъемного устройства. Для подъема груза захват приводят в исходное полох ение (фиг. 3), для чего необходимо сдвинуть рамку 4 вместе с рычагами 6 за рукоятки 11 вправо вдоль оси 8 (фиг. 2). Затем рукоятками 11 поворачивают рьчаги 6 против часовой стрелки относительно оси 8. При этом рычаги 6, поворачиваясь, в крайнем нижнем положении своими полками подхватывают рамку 4, Для фиксации рычагов 6 и рамки 4 в горизонтальном положении их сдвигают влево вдоль оси 8 и опускают на палец 10.
Горловину контейнера заправляют между щеками корпуса 1 и перегибают через неподвижную ось 2 (фиг. 4), после чего рамку 4 и рычаги 6 сдвигают вправо вдоль оси 8 за рукоятки 11. Рычаги 6 поворачиваются при этом под собственным весом относительно оси 8 по часовой стрелке в крайнее нижнее положение (фиг. 5). Дальнейщий поворот рычагов
6 И рамки 4 в закрытое положение (фиг. 6} осущесталяется за рукоятки 10.
При этом перемычка 5 рамки перегибает конец горловины контейнера вокруг оси 2 корпуса 1 на 270 . Окончательную фиксацию захвата в закрытом положении осуществляют поворотом рукоятки 11 рычага 6 до упора 9. Вследствие этого при подъеме контейнера получается двойной обхват горловиной перемычки 5 на 180 и одинарный обхват оси 2 на 270 . За счет такого большого утла обхвата исключается возможность выскальзывания его при подъеме, переносе и производстве погрузочно-разгрузочных работ.
Наличие у корпуса неподвижной оси и перемычкой у поворотной рамки и возможности их прижатия друг к другу под действием силы тяжести поднимаемого груза дает возможность поднимать и производить погрузочноразгрузошые работы мягких контейнеров без риска их выскальзываьшя.
Формула изобретения
Захват для грузов в мягкой таре, содержащий навешиваемый на крюк крана корпус, боковые рьиаги, одно плечо каждого из которых жестко закреплено на общей поворотной горизонтальной оси, и неподвижную горизонтальную ось, отличающийся тем, что, с целью повышения надежности работы, на вторых плечах рычагов шарнирно закреплена П-образная рамка с рзт оятками, ось рычагов установлена в корпусе с возможностью горизонтального перемещения, а на боковой поверхности корпуса закреплены ограничительные упоры и палец, взаимодействующий с одним из рычагов.
Источники информации,
принятые во внимание при экспертизе
w
Фиг. /
J
Фиг. Z
S
.J
фиг. 5
фаг. 6
