Изобретение относится к области судостроения и может быть использовано для погрузки (выгрузки) различных грузов на подводном техническом средстве (ПТС), в том числе грузов, имеющих предохранительный прибор и находящихся в необитаемом помещении, расположенном ниже ватерлинии ПТС.
Известны грузозахватные устройства (см. книгу под ред. И.И. Артоболевского «Механизмы в современной технике», том 1, с.120…123, М., Наука, главная редакция физико-математической литературы, 1970 г.), основным узлом в которых является рычажный захват. При подъеме устройства с грузом за грузовую скобу происходит автоматический захват поднимаемого груза.
Недостатком данных устройств является малая эксплуатационная надежность их из-за автоматического раскрытия захвата при контакте с поверхностью, а также большие габариты, затрудняющие проведение погрузки груза в необитаемое помещение ПТС. Кроме того, при погрузке-выгрузке грузов, имеющих предохранительный прибор (см. альбом «Оружие России», М., Издательский дом «Военный Парад», 2000, с.105, например граната ручная РГО и РГН, граната штурмовая РШГ-1, РШГ-2), эти устройства не могут безопасно опускать (поднимать) грузы в необитаемое помещение, находящееся ниже ватерлинии ПТС. Известны автоматические захваты грузоподъемных устройств (см. книгу под ред. С.М. Меламеда «Автоматические захваты для штучных грузов,» М., Машиностроение, 1965 г., с.24), в которых клещевой захват состоит из двух захватов, шарнирно установленных в корпусе штанги, и подпружиненных рычагов. Захват груза в этих устройствах осуществляется автоматически при движении захвата с грузом вверх, а раскрытие груза осуществляется при опускании груза на поверхность.
Недостатком указанных аналогов являются большие габариты, затрудняющие проведение операции погрузки (выгрузки) грузов в необитаемое помещение, находящееся ниже ватерлинии ПТС. Кроме того, при погрузке (выгрузке) грузов, имеющих предохранительный прибор, возникают дополнительные трудности в обеспечении погрузо-разгрузочных работ «вслепую» в необитаемое помещение, находящееся ниже ватерлинии ПТС.
Известно грузозахватное устройство, содержащее корпус с проушиной (грузовой скобой) для подвески к грузоподъемному механизму (см. а.с. №852760, МКИ В66С 1/42, бюллетень №29 от 07.08.81 г.), шарнирно установленный на корпусе захват в виде подпружиненных захватных рычагов (зацепов) и подпружиненного в вертикальном направлении распорного клина, взаимодействующего с хвостовиками захватных рычагов, распорный клин закреплен на корпусе шарнирно посредством оси и подпружинен, а на корпусе закреплен ограничитель поворота клина. При достижении назначенной высоты при подъеме груза захват автоматически раскрывается и груз освобождается от устройства. Это устройство принято заявителем в качестве наиболее близкого аналога.
Устройство по а.с. №852760 при достижении определенной высоты приводит к автоматическому раскрытию захвата и груз освобождается от устройства, что небезопасно и не позволяет производить манипуляцию с грузом, что особенно недопустимо при погрузке (выгрузке) грузов, имеющих предохранительный прибор, в необитаемое помещение, находящееся ниже ватерлинии ПТС.
Задачей настоящего изобретения является обеспечение эксплуатационной надежности, а также расширение эксплуатационных возможностей устройства благодаря обеспечению погрузки (выгрузки) груза с предохранительным прибором при отсутствии видимости груза и места его установки (вслепую) в необитаемое помещение, находящееся ниже ватерлинии ПТС.
Поставленная задача решена за счет того, что в известном устройстве погрузки (выгрузки) груза, включающем корпус с грузовой скобой для подвески к грузоподъемному устройству на одном конце и с захватом, его корпусом и подпружиненными зацепами (рычагами) на другом конце, согласно изобретению, захват снабжен стопором, который установлен посредством кожуха на корпусе захвата с возможностью поворота и взаимодействия с предохранительным прибором, предусмотренным на грузе, а корпус устройства выполнен в виде полой штанги, на которой с возможностью фиксации от разворота установлена горизонтальная подвижная опора, а также два неподвижных концевых упора и направляющая обечайка, при этом захват и стопор снабжены приводами с блоком управления, которые выполнены в виде тяги захвата и тяги стопора, установлены в упомянутой полой штанге и соединены в нижней части с подпружиненными зацепами захвата и с кожухом со стопором соответственно, а в верхней части - с блоком управления, причем тяга захвата установлена с возможностью продольного перемещения, а тяга стопора - с возможностью поворота.
Кроме того, тяга захвата установлена внутри тяги стопора и выполнена из соединенных между собой верхнего штока с рукояткой управления захватом, переходного резьбового стержня, основного стержня с резьбовым наконечником и нижнего штока с установленной на нем рукояткой раскрытия зацепов захвата.
Кроме того, направляющая обечайка и корпус захвата закреплены в нижней части корпуса устройства, выполненного в виде полой штанги, при этом корпус захвата зафиксирован от разворота и снабжен накладками, между которыми шарнирно установлены на осях зацепы захвата, которые соединены с нижним штоком тяги захвата посредством серег и поджаты пружиной, установленной на нижнем штоке тяги захвата, имеющем упор для взаимодействия с тягой стопора и ограничения хода тяги захвата, при этом на упомянутых накладках закреплены ограничительные планки с возможностью взаимодействия с наделкой груза, при этом в одной из ограничительных планок выполнена прорезь.
Кроме того, тяга стопора выполнена из соединенных между собой муфты, основного стержня и втулки, на которой закреплен поводок с возможностью взаимодействия с кожухом, который установлен на корпусе захвата с возможностью поворота посредством фланца, при этом на муфте установлена рукоятка управления стопором.
Кроме того, стопор выполнен в виде сектора, который закреплен на кожухе, при этом на секторе выполнена лапка с возможностью взаимодействия с предохранительным прибором, предусмотренным на грузе.
Кроме того, блок управления выполнен в виде корпуса, в котором с возможностью поворота и фиксации установлена муфта тяги стопора с установленным в ней верхним штоком тяги захвата, а также стойка с возможностью фиксации с упомянутой муфтой, при этом на муфте тяги стопора с возможностью поворота в горизонтальной плоскости закреплена рукоятка управления стопором, а в верхней части упомянутой стойки и верхнего штока тяги захвата с возможностью поворота в вертикальной плоскости установлена рукоятка управления захватом, причем в верхней части муфты установлен стопорный винт, а в верхнем штоке тяги захвата выполнен П-образный паз для фиксации тяги захвата от вертикального перемещения, при этом в стойке установлен шариковый фиксатор для фиксации муфты тяги стопора при развороте в крайние положения.
Кроме того, горизонтальная подвижная опора снабжена устройством фиксации от разворота, которое выполнено в виде откидных распорок с подпружиненными защелками, установленных с возможностью поворота в вертикальной плоскости и взаимодействия с приемным устройством подводного технического средства на осях, закрепленных на горизонтальной опоре, при этом откидные распорки выполнены с возможностью стопорения в вертикальном и горизонтальном положениях при помощи шариковых фиксаторов и крюков соответственно.
Предложенное техническое решение устройства погрузки-выгрузки позволяет улучшить эксплуатационные возможности устройства благодаря обеспечению погрузки (выгрузки) груза с предохранительным прибором при отсутствии видимости места его установки (вслепую) в необитаемое помещение, находящееся ниже ватерлинии ПТС, повысить надежность устройства благодаря введению в его конструкцию стопора, тяг стопора и захвата с блоком управления ими, который позволяет обеспечить безаварийный перевод упомянутого груза в рабочее положение, а также позволяет оператору упростить проведение операции по захвату груза. Устройство погрузки-выгрузки груза с предохранительным прибором в приемное устройство ПТС изображено на чертежах, где:
на фиг.1 изображена схема погрузки (выгрузки) грузов в необитаемое помещение ПТС;
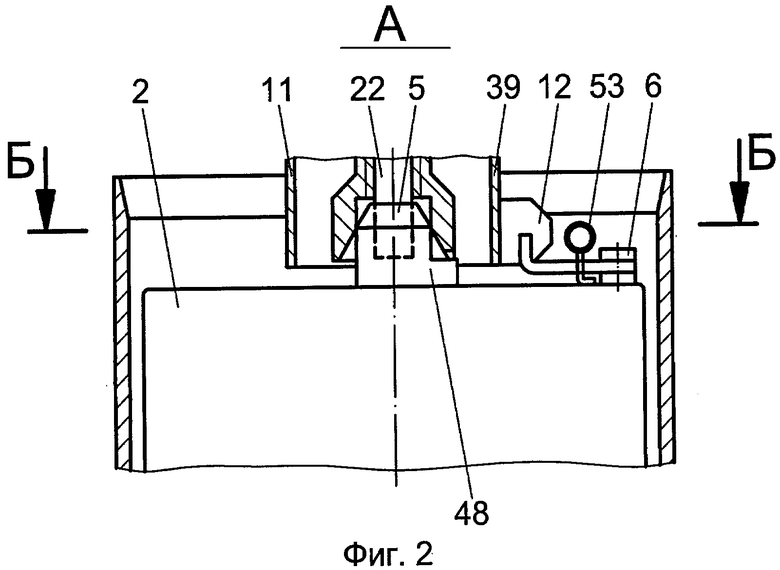
на фиг.2 - выносной элемент А с фиг.1;
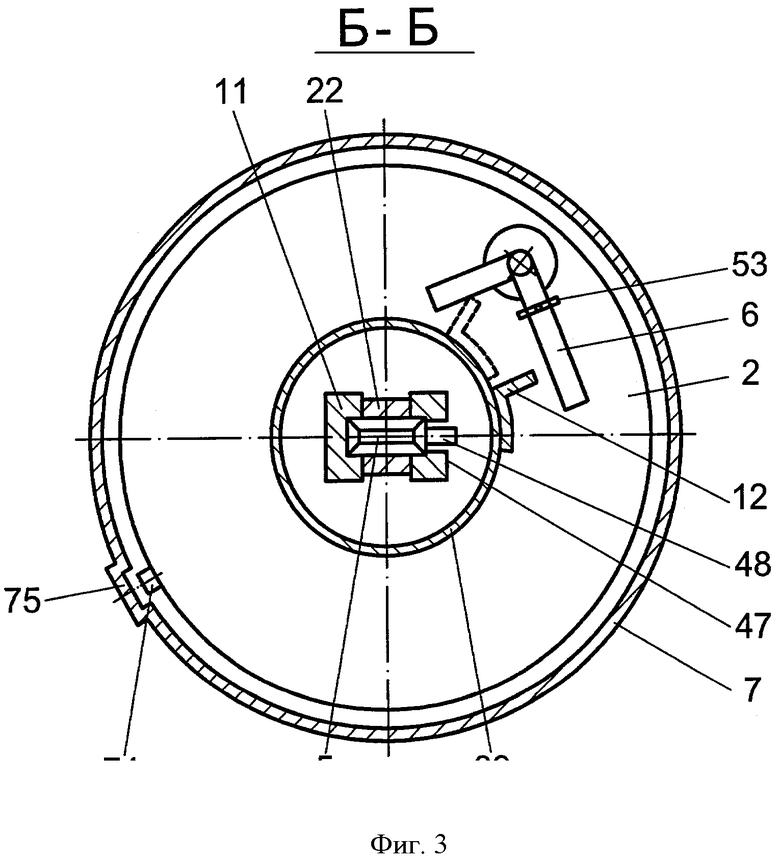
на фиг.3 - сечение Б-Б по фиг.2, планка предохранительного прибора груза зачекована;
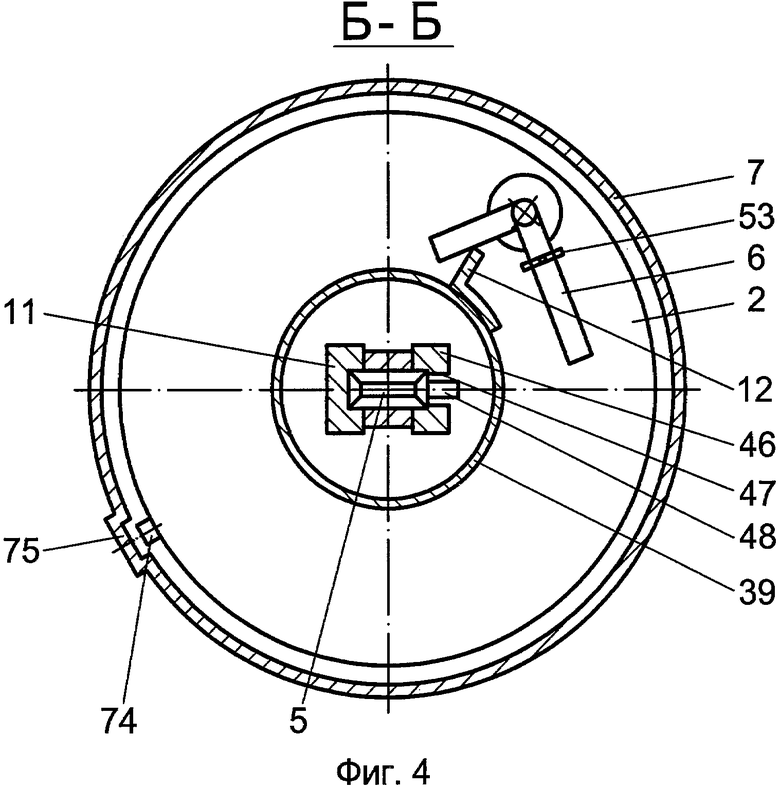
на фиг.4 - сечение Б-Б по фиг.2, планка предохранительного прибора груза расчекована и упирается в стопор устройства;
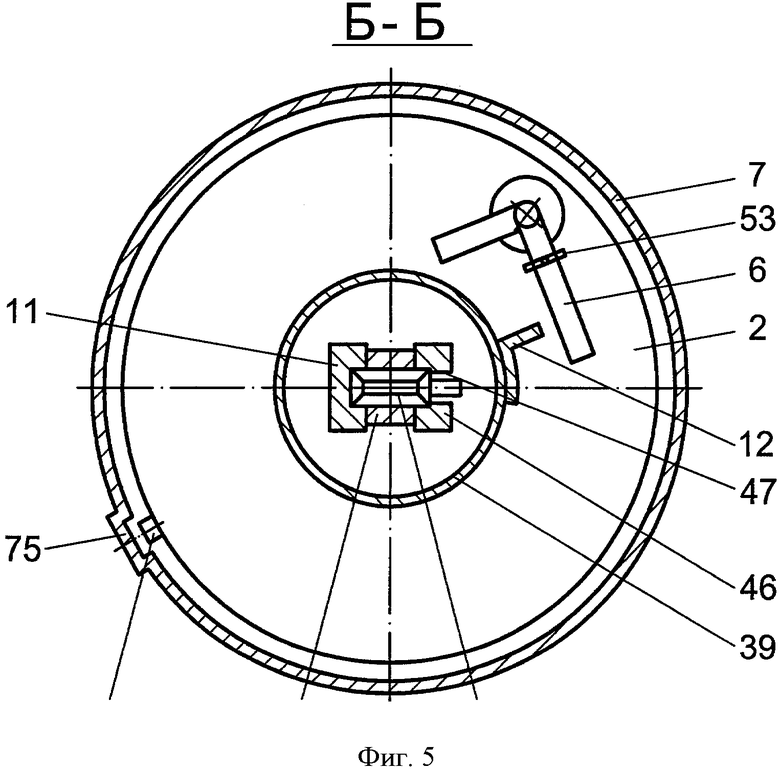
на фиг.5 - сечение Б-Б на фиг.2, планка предохранительного прибора груза расчекована и упирается в стенку транспортного стакана;
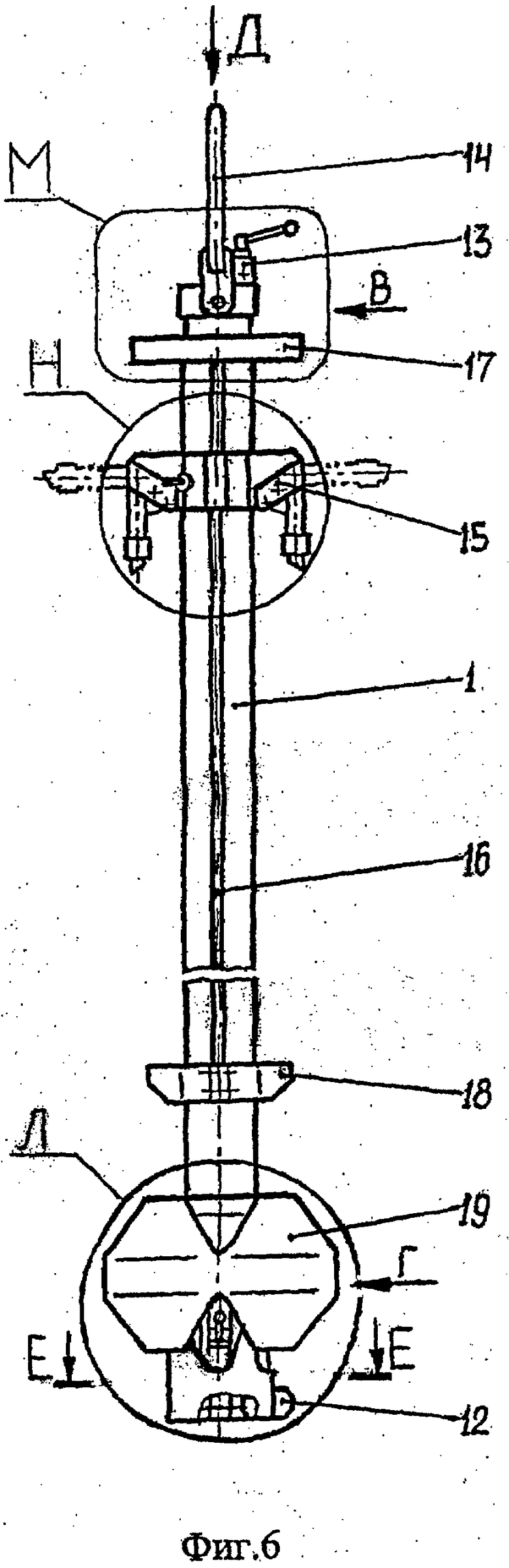
на фиг.6 - общий вид устройства;
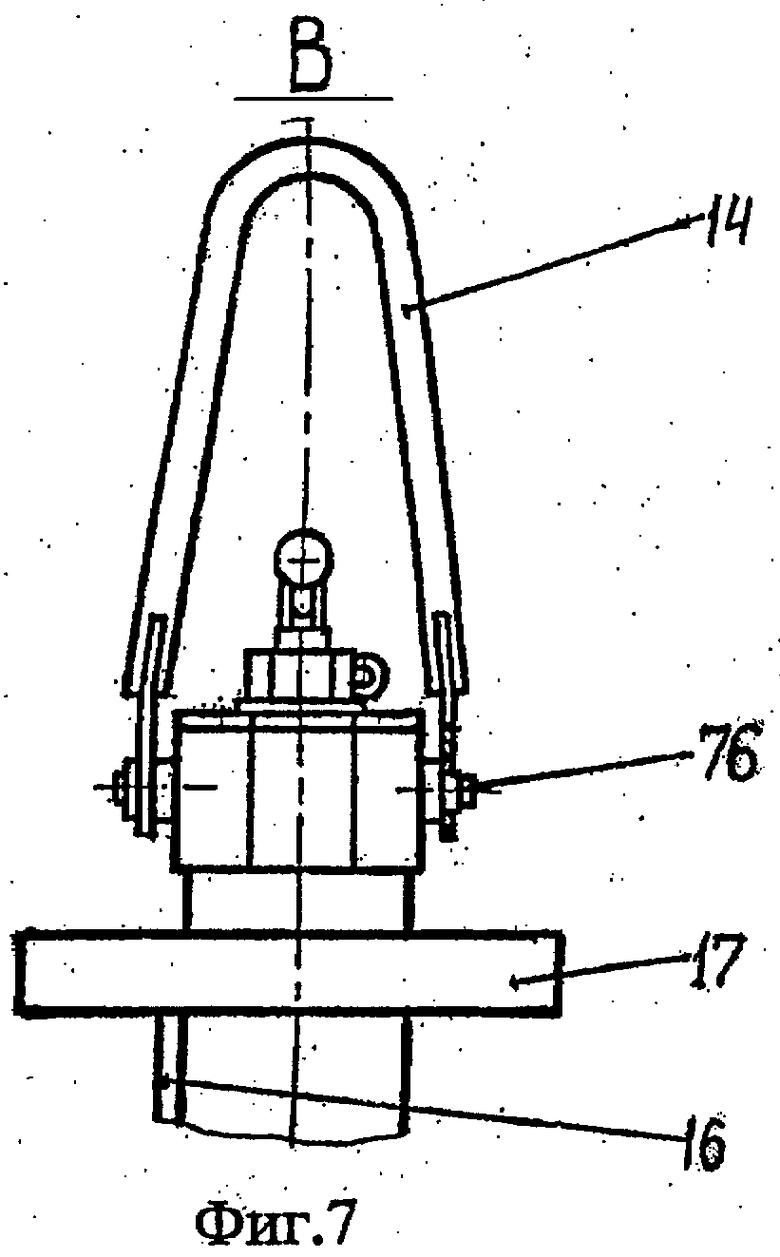
на фиг.7 - вид В на фиг.6;
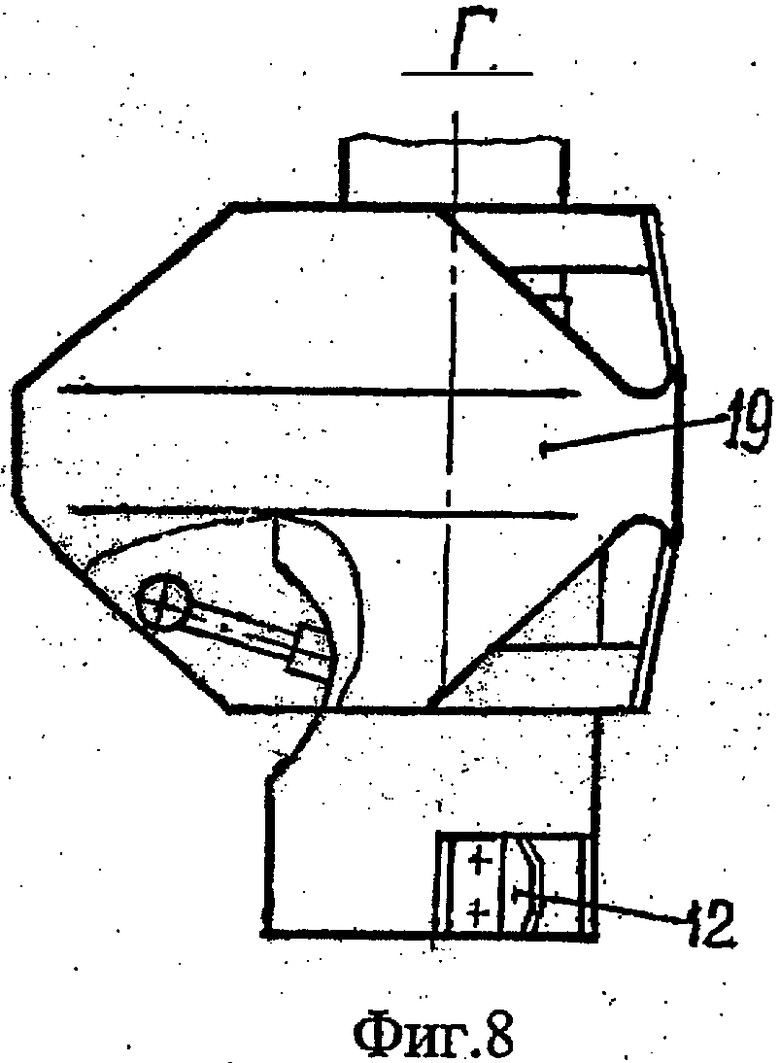
на фиг.8 - вид Г на фиг.6;
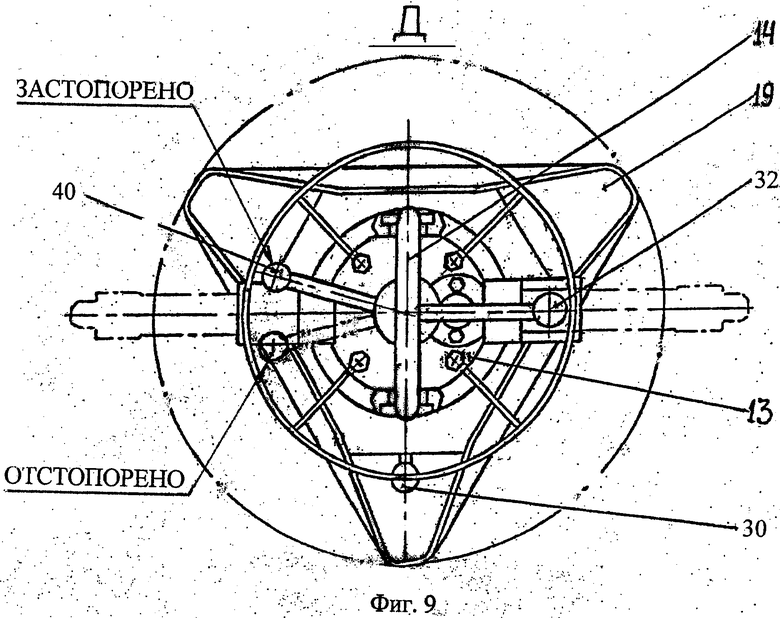
на фиг.9 - вид Д на фиг.6;
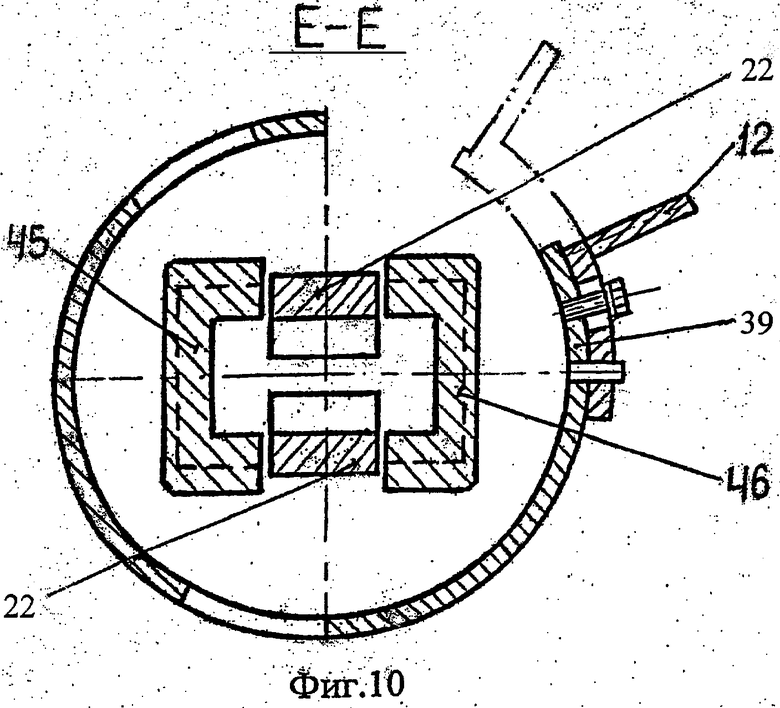
на фиг.10 - разрез Е-Е на фиг.6;
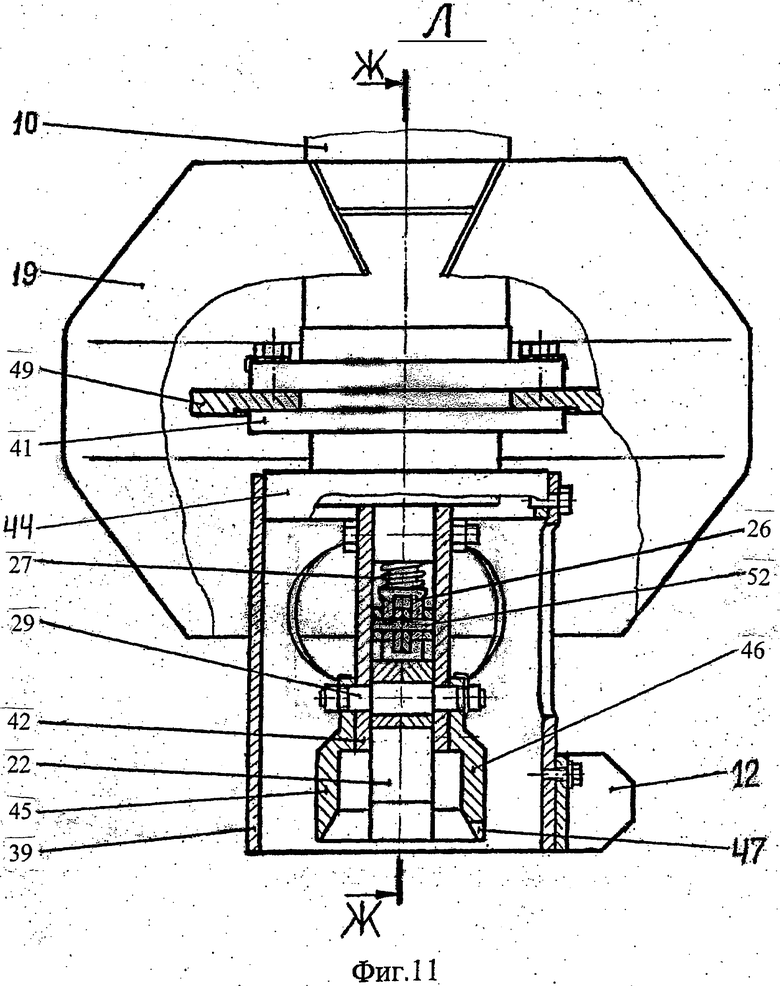
на фиг.11 - выносной элемент Л на фиг.6 (захват устройства);
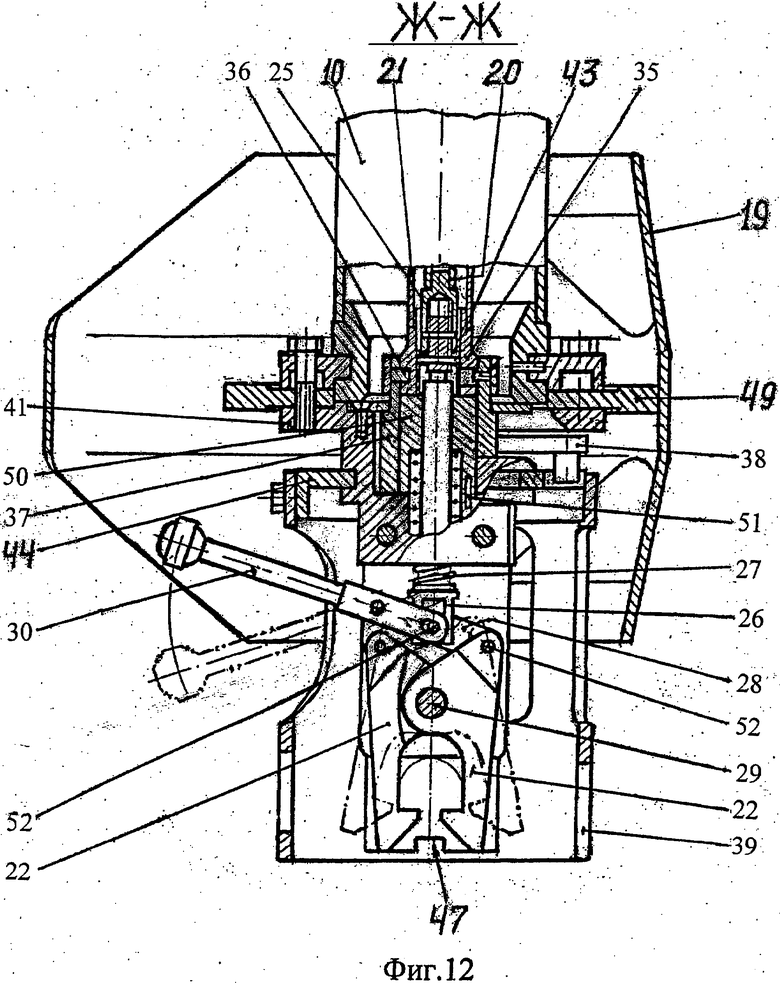
на фиг.12 - разрез Ж-Ж на фиг.11;
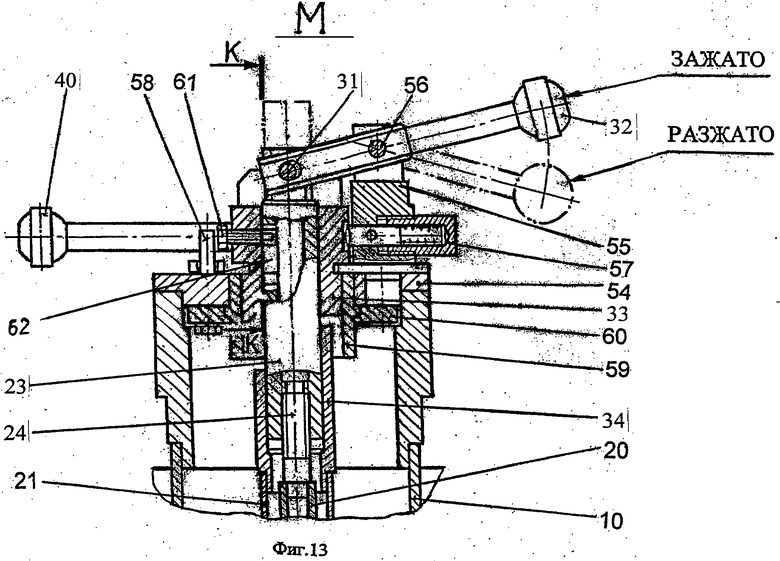
на фиг.13 - выносной элемент М на фиг.6 (блок управления устройства);
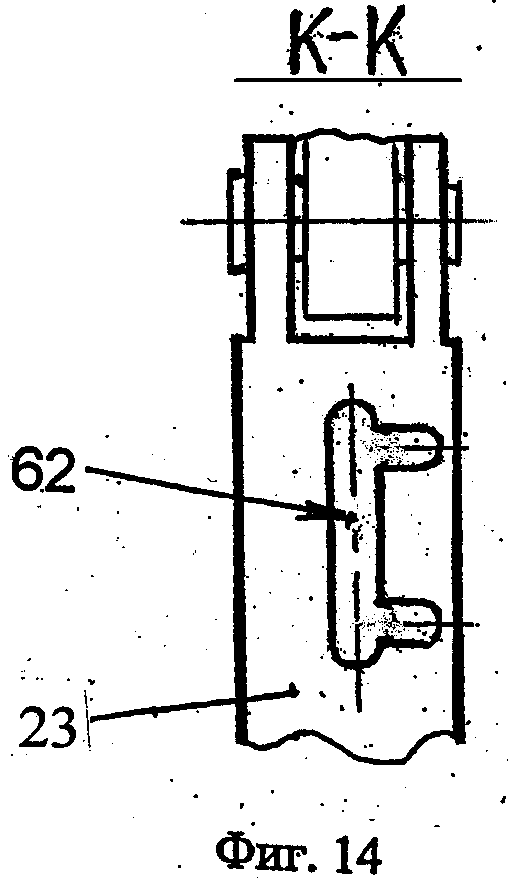
на фиг.14 - сечение К-К на фиг.13 (фигурный паз для стопорного винта на верхнем штоке, рукоятка управления захватом не показана);
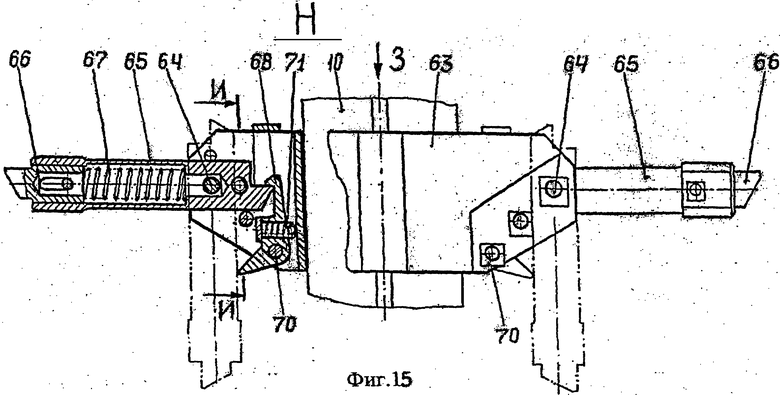
на фиг.15 - выносной элемент Н на фиг.6 (горизонтальная опора устройства);
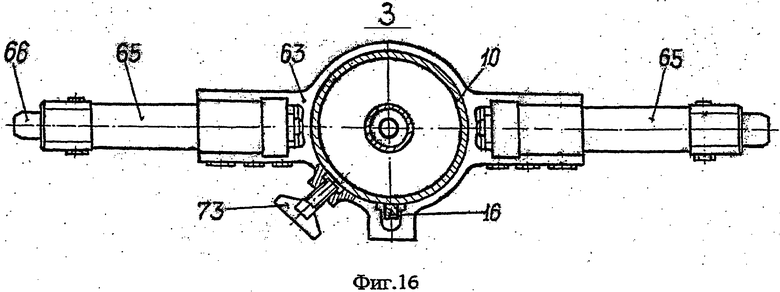
на фиг.16 - вид З на фиг.15;
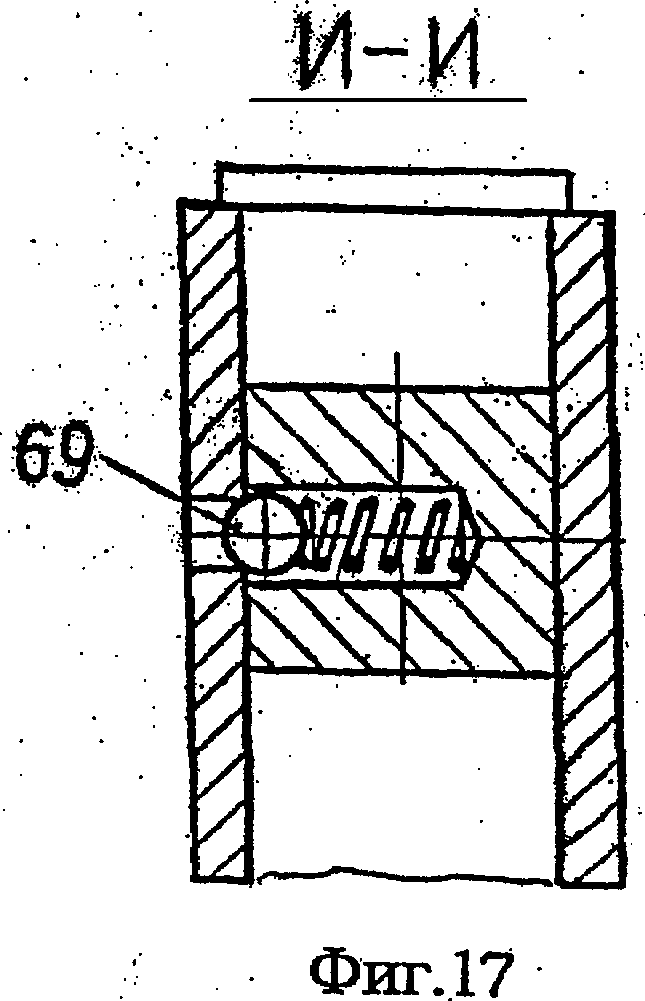
на фиг.17 - разрез И-И на фиг.15.
Устройство погрузки (выгрузки) (см. фиг.1) содержит корпус 1, предназначено для погрузки-выгрузки груза 2 через приемное устройство 3 в необитаемое помещение ПТС посредством грузоподъемного крана 4. Устройство может использоваться как для погрузки (выгрузки) обычного груза, так и груза, имеющего грузовую наделку 5 (см. фиг.2) и предохранительный прибор с планкой 6 для приведения груза 2 в рабочее состояние (например, подготовки его к взрыву, см. фиг.2 и 3, см. альбом «Оружие России», М., Издательский дом «Военный Парад», 2000, с.105, например граната ручная РГО и РГН, граната штурмовая РШГ-1, РШГ-2), в транспортный стакан 7, который также размещен в необитаемой части корпуса 8 ПТС ниже его ватерлинии 9.
Корпус 1 выполнен в виде полой штанги 10. На нижнем конце корпуса 1 закреплен захват 11 и стопор 12 (см. фиг.2, 3, 4, 5, 6 и 8), а на верхнем конце закреплен блок управления 13 с грузовой скобой 14 (см. фиг.6 и 7). На корпусе 1 установлена горизонтальная подвижная опора 15 (см. фиг.6), зафиксированная от разворота в горизонтальной плоскости шпонкой 16 (см. фиг.6 и 16), и закреплены упоры 17 и 18, а в нижней части корпуса 10 закреплена направляющая обечайка 19.
Захват 11 и стопор 12 (см. фиг.12 и 13) соединены с блоком управления 13 посредством тяги 20 и тяги 21 соответственно, проходящих внутри полой штанги 10. Тяга 20 предназначена для взаимодействия с зацепами 22 захвата 11, а тяга 21 - для разворота стопора 12, при этом тяга 20 установлена внутри тяги 21. Тяга 20 в верхней части пристыкована к штоку 23, а в нижней части с помощью резьбовой пары 24, 25 - к нижнему штоку 26 (см. фиг.12, 13). Нижний шток 26 поджат пружиной 27 и связан серьгами 28 и осью 29 с рукояткой 30 и с зацепами 22. В верхнем штоке 23 (см. фиг.13) установлена ось 31, на которой удерживается рукоятка 32 для управления захватом 11. Тяга 20 предназначена для зажима-разжима грузовой наделки 5 груза 2 (см. фиг.2) посредством зацепов 22 захвата 11 и она может перемещаться в тяге (трубе) 21 только в вертикальном направлении.
Захват 11 и стопор 12 (см. фиг.1, 2, 3, 4, 5, 6, 8, 10, 11 и 12) служат для захвата груза 2 за грузовую наделку 5 для его погрузки-выгрузки, удержания груза 2, стопорения предохранительной планки 6 груза 2 и отсоединения (расстыковки) грузовой наделки 5 груза 2 от УПВГ.
Тяга 21 стопора 12 по всей длине полой штанги 10 охватывает тягу 20 снаружи и так же, как тяга 20, собрана из отдельных деталей: в зоне расположения блока управления 13 (см. фиг.13) верхняя часть тяги 21 выполнена в виде муфты 33, которая торцевым соединением находится в контакте с цапфой 34, которая жестко соединена непосредственно с трубой-тягой 21, а в зоне расположения захвата 11 (см. фиг.12) тяга 21 жестко соединена с наконечником 35, который посредством крепежа через шпонку 36 соединен с втулкой 37, на которой неподвижно закреплен поводок 38 для взаимодействия с кожухом 39, на котором закреплен стопор 12.
В муфте 33 неподвижно установлена рукоятка 40 (см. фиг.13) управления стопором 12 посредством придания вращательного движения тяге 21. Тяга 21 предназначена для поворота кожуха 39 со стопором 12 (см. фиг.2, 3, 4, 5, 10 и 11), который, взаимодействуя с предохранительной планкой 6 предохранительного прибора груза 2 (см. фиг.2 и 3), приводит, при необходимости, в рабочее положение груз 2.
Захват 11 (см. фиг.11 и 12) включает корпус 41 с накладками 42, прикрепленными к нему крепежом. Между накладками 42 шарнирно установлены два зацепа (захватных рычага) 22 на оси 29 через серьги 28. Зацепы 22 поджаты пружиной 27, установленной на нижнем штоке 26 тяги 20. В верхней части нижнего штока 26 установлен упор 43, который при взаимодействии с заплечиками наконечника 35 тяги стопора 21 ограничивает ход тяги 20 от чрезмерного раскрытия зацепов 22. Корпус 41 закреплен на корпусе 1, выполненном в виде полой штанги 10. Захват 11 закрыт кожухом 39, который установлен посредством фланца 44 и крепежа в корпусе 41 с возможностью поворота. Фланец 44 состоит из двух частей, для удобства сборки, которые удерживаются в сборе кожухом 39 посредством крепежа. Фланец 44 установлен с возможностью вращения в пазу, выполненном в корпусе 41 захвата 11. На накладках 42 (см. фиг.11) прикреплены крепежом изогнутые накладки 45 и 46 для контакта с конусными поверхностями грузовой наделки 5 груза 2, причем в накладке 46 (см. фиг.2, 3, 4, 5, 11 и 12) выполнена прорезь 47 для размещения в ней лапки 48 грузовой наделки 5 с целью ориентации груза 2 относительно транспортного стакана 7 и фиксации от разворота тяги 20 относительно грузовой наделке 5 груза 2. К корпусу 41 захвата 11 неподвижно прикреплен фланец 49 с направляющей обечайкой 19, служащей для направления УПВГ в приемном устройстве 3 при проведении операций погрузки-выгрузки груза 2. В верхней части нижнего штока 26 установлена вставка 50, обеспечивающая возможность поворота тяги 21 стопора 12 вокруг нижнего штока 26 тяги захвата 20 с наименьшими силами сопротивления трению. Захват 11 от разворота вокруг своей вертикальной оси зафиксирован через вставку 50 штифтом 51. Рукоятка 30 предназначена для проведения, при необходимости, операции раскрытия зацепов 22 (см. фиг.12) при нахождении оператора на пирсе. Серьги 28 одним концом закреплены на нижнем штоке 26, другим - на зацепах 22 посредством осей 52. Захват 11 постоянно находится в положении «ЗАЖАТО» с помощью пружины 27, воздействующей посредством штока 26, осей 52, серег 28 и осей 29 на зацепы 22. Перевод захвата 11 в положение «РАЗЖАТО» производится рукояткой 30 или рукояткой 32 поворотом вниз. Рукоятка 32 связана с зацепами 22 захвата 11 тягой 20, а рукоятка 30 установлена непосредственно на захвате 11. Стопор 12 (см. фиг.2, 3, 4, 5, 6, 10 и 11) предназначен для разворота и удержания предохранительной планки 6 груза 2 в процессе погрузки и выгрузки, а также для приведения в рабочее (взрывоопасное) состояние груза 2, при необходимости. Стопор 12 представляет собой сектор (см. фиг.10) с лапкой 12, который закреплен на наружной стенке кожуха 39 с помощью крепежа. Поворот стопора 12 возможен за счет поворота рукоятки 40 управления стопором блока управления 13 (см. фиг.13). Предохранительная планка 6 прибора груза 2 предварительно зачекована чекой 53 (см. фиг.3) для предотвращения несанкционированного приведения в действие груза 2.
Блок управления 13 (см. фиг.6, 7 и 13) предназначен для приведения в действие захвата 11 и стопора 12. Блок управления 13 выполнен в виде корпуса 54, в котором размещены муфта 33 тяги 21 стопора 12, верхний шток 23 тяги 20 захвата 11, стойка 55, рукоятка 32 управления захватом 11 и рукоятка 40 управления стопором 12. Рукоятка 32 управления захватом 11 зафиксирована на стойке 55 посредством оси 56 и соединена с верхним штоком 23 тяги 20 осью 31. Рукоятка 32 управления захватом 11 может совершать вращательное движение в вертикальной плоскости, а рукоятка 40 управления стопором 12 - вращательное движение в горизонтальной плоскости. В стойке 55 размещен шариковый фиксатор 57 для фиксации муфты 33 при развороте ее в крайние положения. Рукоятка 32 предназначена для приведения в действие захвата 11 при нахождении оператора на ПТС, в районе приемного устройства 3, а рукоятка 40 - для совершения поворота кожуха 39 вместе со стопором 12 при нахождении оператора над приемным устройством 3. Муфта 33 имеет два фиксированных положения: «ЗАСТОПОРЕНО», при котором(см. фиг.3 и 4) предохранительная планка 6 груза 2 зачекована и упирается в стопор 12 (на фиг.3 - штрихпунктирная линия), и «ОТСТОПОРЕНО», при котором предохранительная планка 6 груза 2 (см. фиг.5) расчекована и упирается в стенку транспортного стакана 7. Упоры 58 (см. фиг.13), установленные на корпусе 54, служат для ограничения поворота рукоятки 40 в крайних положениях. Рукоятка 32 служит для приведения захвата 11 в положения «ЗАЖАТО» и «РАЗЖАТО», дублируя при этом движение рукоятки 30 захвата 11. В корпусе 54 установлен стакан-подшипник 59 для облегчения поворота муфты 33, который удерживается крепежом посредством фланца 60. В верхней части муфты 33 установлен стопорный винт 61 для фиксации тяги 20 (см. фиг.13) через верхний шток 23 от перемещения ее вверх-вниз и соответственно установки захвата 11 в положения «ЗАЖАТО» и «РАЗЖАТО». Для этого в верхнем штоке 23 выполнен П-образный паз 62 (см. фиг.14), который предотвращает несанкционированное раскрытие зацепов 22 при нахождении рукояток 30 и 32 в крайних положениях.
Горизонтальная подвижная опора 15 (см. фиг.1, 6, 15, 16 и 17) предназначена для направления движения штанги 10 в приемном устройстве 3 ПТС при совершении операций погрузки-выгрузки с применением УПВГ и ориентации его в горизонтальной плоскости (нос-корма). Горизонтальная подвижная опора 15 выполнена в виде корпуса 63 (см. фиг.15 и 16), в котором на осях 64 подвижно закреплены откидные распорки 65 с защелками 66, поджатыми пружинами 67. Распорки 65 имеют возможность поворота на осях 64 для отсоединения опоры 15 от приемного устройства 3 при нажатии упора 18 (см. фиг.6) на крюки 68 (см. фиг.15) при движении УПВГ с упором вверх. В вертикальном положении (см. фиг.17) распорки 65 стопорятся шариковым фиксатором 69. В горизонтальном положении распорки 65 удерживаются крюками 68, сидящими на осях 70 и поджатыми пружинными упорами 71.Горизонтальная подвижная опора 15 имеет возможность закрепляться в приемном устройстве 3 посредством защелок 66, которые входят в соответствующие отверстия 72 (см. фиг.1) в приемном устройстве 3. На корпусе 63 (см. фиг.16) имеется резьбовое отверстие для установки в нем стопорного винта 73 с целью экстренной остановки или фиксации штанги 10 при перемещении ее вверх-вниз. Для обеспечения надежной стыковки УПВГ с грузом 2 и предотвращения разворота груза 2 относительно транспортного стакана 7 на грузе 2 предусмотрена шпонка 74, взаимодействующая с соответствующим пазом 75 (см. фиг.3, 4 и 5) транспортного стакана 7.
Грузовая скоба 14 (см. фиг.1, 6 и 7) предназначена для соединения УПВГ с грузоподъемным краном 4 через петли 76, установленные на корпусе блока управления 13.
Упор 17 (см. фиг.1 и 6) предназначен для ограничения перемещения вверх горизонтальной подвижной опоры 15 и ограждения рукояток 32 и 40 блока управления 13 от задевания их при эксплуатации УПВГ.
Направляющая обечайка 19 (см. фиг.1, 6, 8, 11 и 12) предназначена для направления УПВГ при погрузке и выгрузке груза 2 в приемное устройство 3 и удерживается на корпусе 1 (или 10) посредством фланца 49 (см. фиг.12).
Работа УПВГ для погрузки груза 2, находящегося в вертикальном положении на пирсе базы в транспортный стакан 7, расположенный в необитаемом помещении корпуса 8 ПТС, находящегося в надводном положении, происходит следующим образом (см. фиг.1).
Закрепляют УПВГ посредством скобы 14 на гаке базового грузоподъемного крана 4. На пирсе базы опускают УПВГ на груз 2, расположенный вертикально. Под воздействием массы УПВГ корпус 41 захвата 11 (см. фиг.11 и 12) давит на пружину 27, последняя упирается в заплечики нижнего штока 26 и через серьги 28 воздействует на верхние части зацепов 22, которые, поворачиваясь относительно оси 29, разводят автоматически свои крючкообразные концы. В этот момент происходит контакт УПВГ через захват 11 с грузовой наделкой 5 (см. фиг.2) груза 2. Далее, при подъеме УПВГ, когда его масса воспринимается через грузовую скобу 14 грузоподъемным краном 4, зацепы 22 под действием пружины 27 сжимаются и своими горизонтальными крючкообразными концами заходят под горизонтальные плоскости (см. фиг.12) грузовой наделки 5 (см. фиг.2) груза 2. Стыковка УПВГ с грузом 2 и захват груза 2 захватом 11 произведены. Далее необходимо застопорить предохранительную планку 6 предохранительного прибора груза 2 (см. фиг.3, 4 и 5) от перемещения. Для этого на пирсе поворачивают рукоятку 40 блока управления 13 против направления движения часовой стрелки (см. фиг.9). При этом кожух 39 (см. фиг.2, 3, 4, 5, 10 и 11) со стопором 12 поворачиваются в ту же сторону и происходит контакт лапки 12 с предохранительной планкой 6, а также одновременно происходит стопорение тяги захвата 20 (см. фиг.12 и 13) через верхний шток 23 с пазом 62 (см. фиг.14) блока управления 13 стопорным винтом 61 от перемещения вверх-вниз. Далее необходимо расчековать предохранительную планку 6 (см. фиг.2, 3, 4 и 5) предохранительного прибора груза 2 с целью приведения груза 2 в рабочее состояние. Для этого на пирсе вручную вынимают чеку 48 из планки 6. Поднимают УПВГ с грузом 2 грузоподъемным краном 4 и опускают в приемное устройство 3 корпуса 8 ПТС. Далее состыковывают горизонтальную подвижную опору 15 УПВГ с приемным устройством 3 так, чтобы распорки 65 горизонтальной подвижной опоры 15 вошли в соответствующие отверстия 72 (см. фиг.1) приемного устройства 3. Опускают УПВГ с грузом 2 в транспортный стакан 7 до упора в его дно. Отстопоривают предохранительную планку 6 рукояткой 40 блока управления 13 поворотом рукоятки 40 по направлению движения часовой стрелки (см. фиг.3 и 9), стопор 12 захвата 11 (см. фиг.3 и 10 штрихпунктирная линия) вернулся в исходное положение. Поворотом рукояток 30 или 32 устанавливают захват 11 в положение «РАЗЖАТО». Груз 2 отсоединен от УПВГ. С помощью грузоподъемного крана 4 поднимают УПВГ из приемного устройства 3. При нажатии упора 18 (см. фиг.6) на лапки крюков 68 горизонтальной подвижной опоры 15 (см. фиг.15) последние поворачиваются вокруг осей 70 и выводят распорки 65 из зацепления, защелки 66 горизонтальной опоры 15 выходят из отверстий 72 (см. фиг.1) приемного устройства 3, распорки 65 занимают вертикальное положение, которое фиксируется фиксаторами 69 (см. фиг.17).
Выгрузку груза 2 из транспортного стакана 7 производят в обратном порядке.
Закрепляют УПВГ 1 посредством скобы 14 (см. фиг.1) на гаке базового грузоподъемного крана 4. Опускают УПВГ 1 над корпусом 8 ПТС, на приемное устройство 3. Состыковывают горизонтальную подвижную опору 15 УПВГ с приемным устройством 3 так, чтобы распорки 65 горизонтальной подвижной опоры 15 вошли в соответствующие отверстия 72 (см. фиг.1) приемного устройства 3. Опускают УПВГ до контакта захвата 11 с грузовой наделкой 5 груза 2. Под воздействием массы УПВГ корпус 41 захвата 11 (см. фиг.11 и 12) давит на пружину 27, последняя упирается в заплечики нижнего штока 26 и через серьги 28 воздействует на верхние части зацепов 22, которые, поворачиваясь относительно оси 29, разводят автоматически свои крючкообразные концы. Далее начинают поднимать УПВГ вверх, его масса воспринимается через грузовую скобу 14 грузоподъемным краном 4, зацепы 22 под действием пружины 27 сжимаются и своими горизонтальными крючкообразными концами заходят под горизонтальные плоскости (см. фиг.12) грузовой наделки 5 (см. фиг.2) груза 2 и захват груза 2 захватом 11 произведен. Рукояткой 32 устанавливают захват 11 в положение «ЗАЖАТО». Далее необходимо расстопорить предохранительную планку 6 предохранительного прибора груза 2 (см. фиг.3, 4 и 5). Для этого с приемного устройства 3 поворачивают рукоятку 40 блока управления 13 по направлению часовой стрелки (см. фиг.9). При этом кожух 39 (см. фиг.2, 3, 4, 5, 10 и 11) со стопором 12 также поворачиваются в ту же сторону и одновременно происходит стопорение тяги 20 захвата 11 (см. фиг.12 и 13) через верхний шток 23 с пазом 62 (см. фиг.14) блока управления 13 стопорным винтом 61 от перемещения вверх-вниз, что предотвращает несанкционированное раскрытие зацепов 22. Стопор 12 развернул предохранительную планку 6 предохранительного прибора груза 2 в исходное состояние. При подъеме груза 2 вместе с УПВГ грузоподъемным краном 4 происходит нажатие упора 18 (см. фиг.6) на лапки крюков 68 горизонтальной подвижной опоры 15 (см. фиг.15), последние поворачиваются вокруг осей 70 и выводят распорки 65 из зацепления, защелки 66 горизонтальной подвижной опоры 15 выходят из отверстий 72 (см. фиг.1) приемного устройства 3, а распорки 65 занимают вертикальное положение, которое фиксируется фиксатором 69 (см. фиг.17). При достижении УПВГ вместе с грузом 2 высоты, доступной для оператора, стоящим над приемным устройством 3, вручную зачековывают чеку 53 (см. фиг.3) в предохранительную планку 6 и тем самым груз 2 выводится из рабочего положения. Далее УПВГ вместе с грузом 2 переносится грузоподъемным краном 4 на базовый пирс и опускается на его поверхность. При этом рукоятку 30 устанавливают в положение «РАЗЖАТО». Под воздействием массы УПВГ корпус 41 захвата 11 (см. фиг.11 и 12) давит на пружину 27, последняя упирается в заплечики нижнего штока 26 и через серьги 28 воздействует на верхние части зацепов 22, которые, поворачиваясь относительно оси 29, разводят автоматически свои крючкообразные концы и выходят из зацепления с грузовой наделкой 5 груза 2. Груз 2 отсоединен от УПВГ. С помощью грузоподъемеого крана 4 отводят УПВГ от базового пирса для подъема следующего груза 2 из необитаемого помещения, находящегося ниже ватерлинии ПТС.
Предложенное техническое решение позволяет обеспечить погрузку-выгрузку груза с предохранительным прибором при отсутствии видимости места его установки (вслепую) в необитаемое помещение ПТС, что расширяет его эксплуатационные возможности, а также повысить эксплуатационную надежность устройства благодаря введению в его конструкцию стопора, а также приводов стопора и захвата с блоком управления ими, что также позволяет оператору упростить проведение операции по захвату груза. В предложенном техническом решении уменьшены габариты устройства (по ширине), которые не превышают габаритов транспортируемого груза, что особенно актуально для ограниченных помещений ПТС.
| название | год | авторы | номер документа |
|---|---|---|---|
| ВОЕННАЯ ГУСЕНИЧНАЯ МАШИНА | 2007 |
|
RU2404400C2 |
| ПЛАВАЮЩЕЕ ТРАНСПОРТНОЕ СРЕДСТВО И ГИДРАВЛИЧЕСКАЯ СИСТЕМА ТРАНСПОРТНОГО СРЕДСТВА | 2004 |
|
RU2259280C1 |
| Траверса с захватами за бугели | 2016 |
|
RU2652761C1 |
| СПОСОБ ПРИЕМА В ПОДВОДНУЮ ЛОДКУ АВТОНОМНЫХ НЕОБИТАЕМЫХ ПОДВОДНЫХ АППАРАТОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2006 |
|
RU2328407C1 |
| УСТРОЙСТВО ДЛЯ ПОДЪЕМА ОБЪЕКТОВ СО ДНА МОРЯ НА ПОДВОДНОЕ ТЕХНИЧЕСКОЕ СРЕДСТВО | 2008 |
|
RU2368531C1 |
| Платформа с механизмом погрузки для перевозки миномета | 2024 |
|
RU2841415C1 |
| ГРУЗОВАЯ ТРАВЕРСА | 2001 |
|
RU2214961C2 |
| ТРАВЕРСА РЫЧАЖНАЯ С РАЗДВИЖНЫМИ ЗАХВАТАМИ | 2015 |
|
RU2587185C1 |
| ПЛАВАЮЩИЙ ТРАНСПОРТЕР | 2002 |
|
RU2237582C2 |
| СПУСКО-ПОДЪЕМНОЕ УСТРОЙСТВО ДЛЯ ПОДВОДНОГО ТЕХНИЧЕСКОГО СРЕДСТВА | 2014 |
|
RU2554194C1 |
Изобретение относится к области судостроения и может быть использовано для погрузки (выгрузки) различных грузов на подводном техническом средстве, в том числе грузов, имеющих предохранительный прибор и находящихся в необитаемом помещении, расположенном ниже ватерлинии подводного технического средства. Устройство погрузки- выгрузки включает корпус (1) с грузовой скобой (14) и блоком управления (13) на одном конце и захват (11) с корпусом и подпружиненными зацепами (22) на другом конце. Устройство снабжено стопором (12), который установлен на кожухе (39), закрывающем захват, с возможностью поворота и взаимодействия с предохранительным прибором груза (2). Корпус устройства выполнен в виде полой штанги (10), на которой подвижно с возможностью фиксации от разворота установлена горизонтальная подвижная опора (15), а также два концевых упора (17 и 18) и направляющая обечайка (19). Захват и стопор снабжены приводами с блоком управления, включающим рукоятки управления. Приводы выполнены в виде тяг, установлены в полой штанге и соединены с подпружиненными зацепами захвата и с кожухом со стопором с одной стороны, а с другой стороны - с блоком управления. Тяга захвата (20) установлена внутри тяги стопора (21) с возможностью продольного перемещения, а тяга стопора - с возможностью поворота. Достигается расширение эксплуатационных возможностей устройства, обеспечивается эксплуатационная надежность. 6 з.п. ф-лы, 17 ил.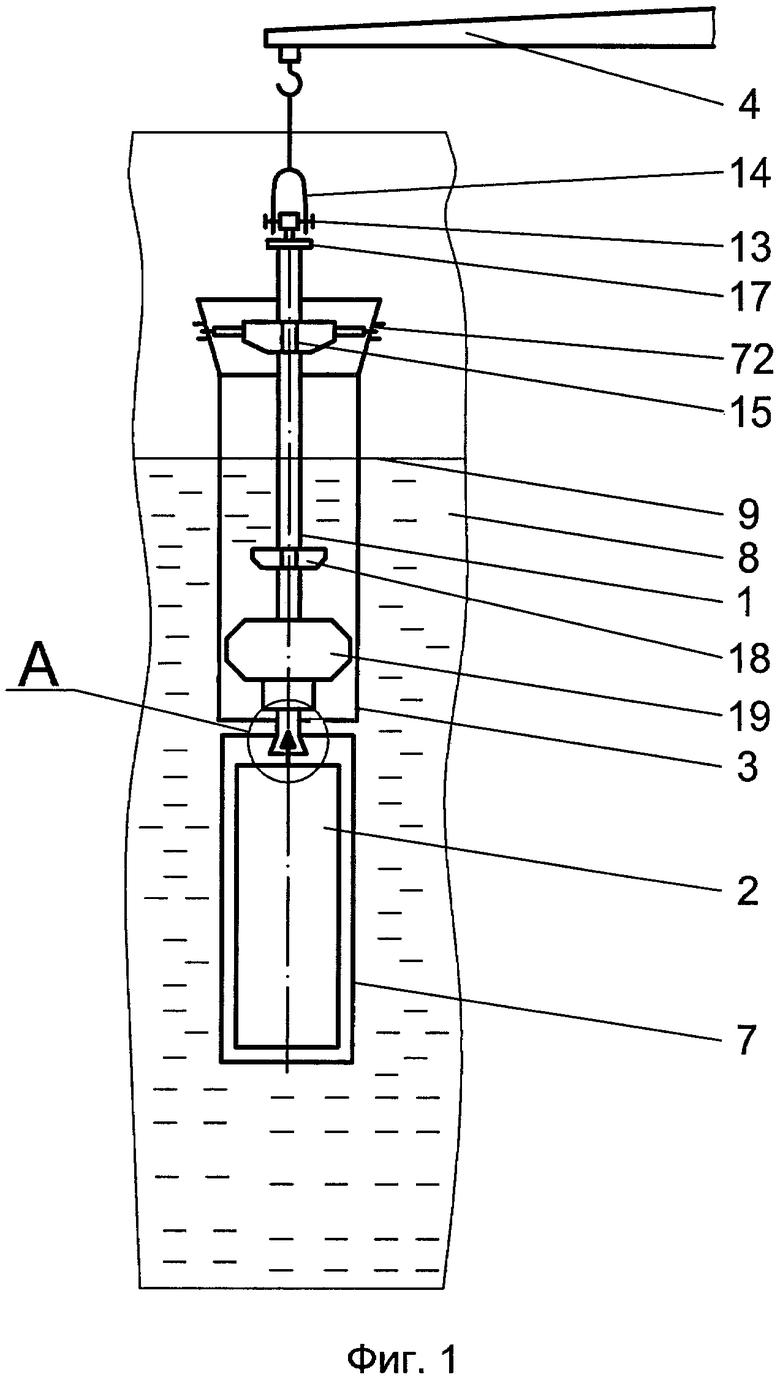
1. Устройство погрузки-выгрузки груза на подводном техническом средстве, включающее корпус с грузовой скобой на одном конце и с захватом его корпусом и подпружиненными зацепами на другом конце, отличающееся тем, что захват снабжен стопором, который установлен посредством кожуха на корпусе захвата с возможностью поворота и взаимодействия с предохранительным прибором, предусмотренным на грузе, а корпус устройства выполнен в виде полой штанги, на которой с возможностью фиксации от разворота установлена горизонтальная подвижная опора, а также два неподвижных концевых упора и направляющая обечайка, при этом захват и стопор снабжены приводами с блоком управления, которые выполнены в виде тяги захвата и тяги стопора, установлены в упомянутой полой штанге и соединены в нижней части с подпружиненными зацепами захвата и с кожухом со стопором соответственно, а в верхней части - с блоком управления, причем тяга захвата установлена с возможностью продольного перемещения, а тяга стопора - с возможностью поворота.
2. Устройство по п.1, отличающееся тем, что тяга захвата установлена внутри тяги стопора и выполнена из соединенных между собой верхнего штока с рукояткой управления захватом, переходного резьбового стержня, основного стержня с резьбовым наконечником и нижнего штока с установленной на нем рукояткой раскрытия зацепов захвата.
3. Устройство по п.1 или 2, отличающееся тем, что направляющая обечайка и корпус захвата установлены в нижней части корпуса устройства, выполненного в виде полой штанги, при этом корпус захвата зафиксирован от разворота и снабжен накладками, между которыми шарнирно установлены на осях зацепы захвата, которые соединены с нижним штоком тяги захвата посредством серег и поджаты пружиной, установленной на нижнем штоке тяги захвата, имеющем упор для взаимодействия с тягой стопора и ограничения хода тяги захвата, при этом на упомянутых накладках закреплены ограничительные планки с возможностью взаимодействия с наделкой груза, для чего в одной из изогнутых накладок выполнена прорезь.
4. Устройство по п.1 или 3, отличающееся тем, что тяга стопора выполнена из соединенных между собой муфты, основного стержня и втулки, на которой закреплен поводок с возможностью взаимодействия с кожухом, который установлен на корпусе захвата с возможностью поворота посредством фланца, при этом на муфте установлена рукоятка управления стопором.
5. Устройство по любому из пп.1, 3, 4, отличающееся тем, что стопор выполнен в виде сектора, который закреплен на кожухе, при этом на секторе выполнена лапка с возможностью взаимодействия с предохранительным прибором, предусмотренным на грузе.
6. Устройство по любому из пп.1 и 2, 4, отличающееся тем, что блок управления выполнен в виде корпуса, в котором с возможностью поворота и фиксации установлена муфта тяги стопора с установленным в ней верхним штоком тяги захвата, а также стойка с возможностью фиксации с упомянутой муфтой, при этом на муфте тяги стопора с возможностью поворота в горизонтальной плоскости закреплена рукоятка управления стопором, а в верхней части упомянутой стойки и верхнего штока тяги захвата с возможностью поворота в вертикальной плоскости установлена рукоятка управления захватом, причем в верхней части муфты установлен стопорный винт, а в верхнем штоке тяги захвата выполнен П-образный паз для фиксации тяги захвата от вертикального перемещения, при этом в стойке установлен шариковый фиксатор для фиксации муфты тяги стопора при развороте в крайние положения.
7. Устройство по п.1, отличающееся тем, что горизонтальная подвижная опора снабжена устройством фиксации от разворота, которое выполнено в виде откидных распорок с подпружиненными защелками, установленных с возможностью поворота в вертикальной плоскости и взаимодействия с приемным устройством подводного технического средства на осях, закрепленных на горизонтальной опоре, при этом откидные распорки выполнены с возможностью стопорения в вертикальном и горизонтальном положениях при помощи шариковых фиксаторов и крюков, соответственно.
| Грузозохватное устройство | 1979 |
|
SU852760A1 |
| Грузозахватное устройство | 1977 |
|
SU727551A1 |
| Грузозахватное устройство | 1989 |
|
SU1768492A2 |
| WO 9631429 A1, 10.10.1996. | |||

