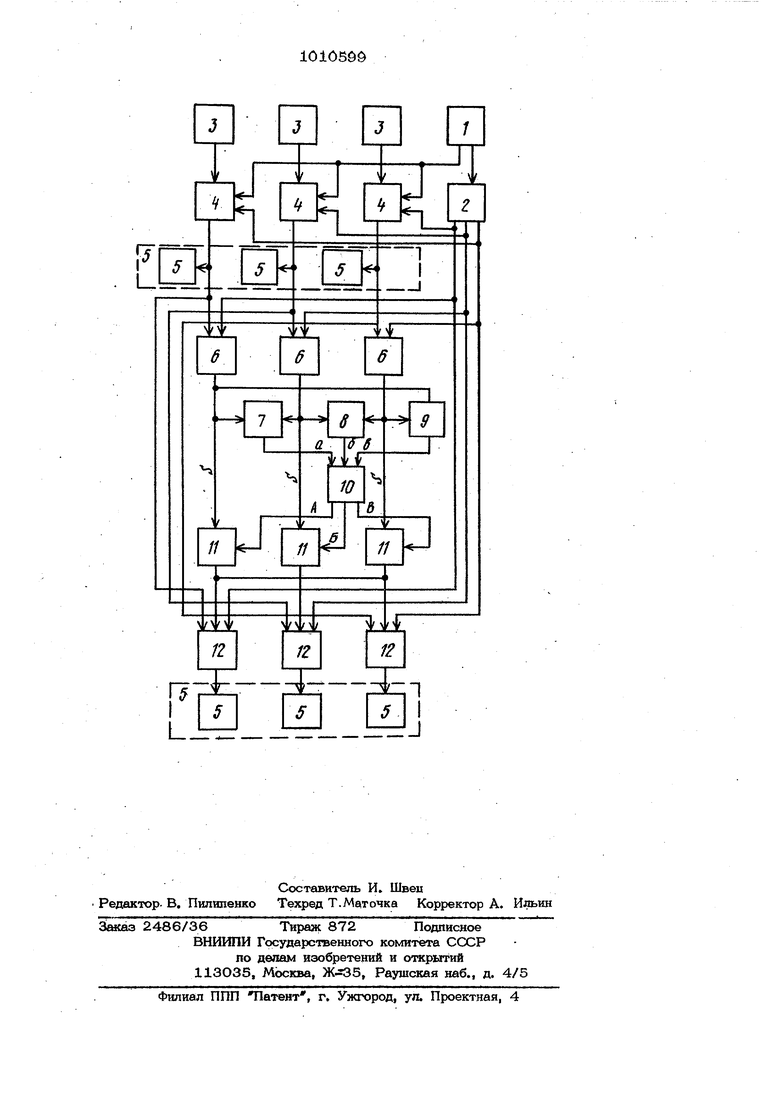
Изобретение относится к автоматическому контролю и предназначено для ис- пользования в системах управления металлорежущими станками. Известно устройство автоматического контроля при управлении металлорежущим станком, содержащее блок задания программ с перфоленты, блок коррекции, блок логических вычислений, блок оперативной памяти, блок памяти алгоритмов, блок управления, блок коммутации микрокоманд и блок индикации | 1 . Недостатком данного устройства является его сложность. Наиболее близкой по технической сущности к прецлагаемой является система цифровой индикации для металлорежущих станков с многопозиционными поворотными и револьверными головками, содержащая на кажцую координатную ось обработк последовательно соединенные датчик пере мещений, преобр азоватеяь, элемент ИЛИ, реверсивный счетчик и индикатор, а так:же блок ввода задания, задатчики величины и знака коррекции, стартстопный гене ратор, счетчик величины коррекции, элементы Запрет, переключатели номера инструмента, схемы сигналов равнозначности, схемы коррекции направления отсч та и триггер 2 . Недостатком известного устройства является ограниченность его применения ввиду невозможности контроля перемеще НИИ рабочего органа станка в направлениях, не совпадающих с координатными осями. Цель изобретения - расщирение области применения устройства. Поставленная цель достигается тем, что в устройство, содержащее по каждой обрабатьтаемой координате последователь .но соединенные датчик перемещений, реверсивный счетчик и индикатор, а также блок ввода задания, первым вькодом подключенный ко вторым входам реверсивных счетчиков, вторым выходом - ко входу запоминающего блока, выходы которого подключены к третьим входам реверсивных счетчиков, введены блок выборка оси с наибольшим относительным перемещением, первый, второй . и третий блоки сравнения и по каждой обрабатываемой координате блок деления управляемые ключ и формирователь ко манд, первый вход которого соединен с соответствующим выходом запоминающег блока и с первым входом блока деления по дагшой координате, выходом подклю- ченного к первому входу блока сравншия и к первом входу управляемого ключа по данной координате, второй вход которого соединен с соответствующим выходом блока выбора текущей оси с наибольщим перемещением входами подключенного к выходу соответствующего блока сравнения, причем выход блока деления по первой коордшште соединен с вторым входом блока сравнения по третьей координате выход блока деления по второй координате - с вторым входом блока сравнения по первой координате, выход блока деления по третьей координате - с вторым входом блока сравнения по второй координате, третий вход формирователя подключен к выходу реверсивного счетчика по данной коордшште, а выход ко второму входу индикатора. . На чертеже приведена блок-схема устройства. Устройство содержит блок 1 ввода задания, запоминающий блок 2, датчики 3 перемещений, реверсивные счетчики 4, индикаторы 5, блоки 6 деления, первый 7, второй 8 и третий 9 блок: сравнения, блок 10 выбора текущей оси с наибольщим относительным перемещением, ключи 11 и формирователи 12 команд. Устройство работает следующим образом. Предварительно оператор через блок 1 ввода задания производит запись в запо- минающий блок 2 последовательности размерных чисел (Хо , Уо Zo)i определяющих операции обработки данной детали. При необходимости выполнения перемещений инструмента относительно детали не совпадающими с осями координат операция задается парами (по двум осям) и тройниками (по трем осям) чисел, каждое из которых указьтает величину перемещения по одной из осей. При этом для правильного вьшолнения линейного перемещения инструмента соотношения осевых текущих перемещений при выполнении данной операции должны оставаться постояонными. В процессе обработки размерные числа (о . VQ Zo ) загружаются из запоминающего блока 2 в блоки 6 деления и в формирователи 12 команд. Значения текущего перемещения X, У, Z формируются в счетчтжах 4, воспринимающих импульсы от дaтчvIкoв 3 и вьвдающих значение TCTcjTuvix перемещений на юздикаторы 5 перемещений и на входы блоков 6 деления. В блоках 6 деления определяются отаосительные перемещения по осям X, У, Z в виде отношений I if/No I 2-/2oi которые с выходов блокой деления поступают на входы блоков 7-9 сравнения. Блоками 7-9 сравноь ния соответственно проверяются соотнош ния; X / Хо /Vo i /Vo 2о /Zoi 7 r/2 Результаты сравнения (Да или Нет вводятся в блок 10, которым определяет ся ось с наибольшим относительным nepe мещением. На .управляющий вход ключа 1 относящегося к этой оси, блок 10 вьщает разрешающий сигнал, и на формирователи команд 12 подается значение максимального относительного перемещения (равного Х/Хо или V/Уо , или Z/Zo ). В формирователях 12 для каждой из осей соответственно определяются величины абсолютных отставаний (X, У, Z ) относительно наибольшего относительного перемещения, приведенного к данной оси: й Ч Хо5-Х . Очевидно, что для оси с наибольшим относительным перемещением значение отставания будет равно нулю. С формирователей 12 команд значения абсолютньис отставаний подаются на индикаторы 5. . При переходе к новой- операции обработки сигналом с блока 1 ввода задания из запоминающего блока 2 вьщаются новые значения Х0 , УО ., 2.Q . Работа блока 1О выбора оси с наибольшим относительным перемещением может быть отображена следующим образом: Выходы БВ б в О1 ОО 01 1О 1О О1 0О .1О 1О О1 Выше указаны только те ком&ошиии входных сигналов, которые имеют смысл в данном устройстве, т.е. перечислены те комбинации, которые могут возникнуть в исправном устройстве. Следуе- отме тить, что сигнал на выходе & блока 10 появляется и при , т.е. при уьсутствии рассогласованияWf j Это сделано для того, тода о спечить и в этом вывод формирователями 12 значений X, У, Z (которые будут равны нулю) и вывести их на индикаторы 5. Экономический эф|)ект от внедрения предлагаемого устройства составит 1О 2О% от стоимости провзводимой продукции за счет сокращения времени на о аботку изделия, т.е. повышенна проидво дительн сти, улучшения качества изделия и уменьшения бракованной продукции.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для регистрации сварных швов | 1981 |
|
SU984531A1 |
| Формирователь управляющих сигналов для копировальных станков | 1982 |
|
SU1069975A1 |
| Система автоматического управления трубогибочным станом | 1987 |
|
SU1505624A1 |
| Устройство для установления эффективной нагрузки на долото | 1990 |
|
SU1789016A3 |
| УСТРОЙСТВО ДЛЯ ИМИТАЦИИ РАДИОЛОКАЦИОННОГО ИЗОБРАЖЕНИЯ МЕСТНОСТИ | 1988 |
|
SU1841035A1 |
| Линейно-круговой интерполятор | 1975 |
|
SU555381A1 |
| Стержневая машина | 1980 |
|
SU1003999A1 |
| Аналого-цифровое устройство для управления токарным станком | 1980 |
|
SU947830A1 |
| ЛИНЕЙНО-КРУГОВОЙ ИНТЕРПОЛЯТОР | 1991 |
|
RU2010293C1 |
| Система для программного управления | 1986 |
|
SU1327063A1 |
УСТРОЙСТВО ДЛЯ КОНТРОЛЯ ЛИНЕЙНЫХ ПЕРЕМЕЩЕНИЙ РАБОЧЕГО ОРГАНА МЕТАЛЛОРЕ5ЮТЦИХ СТАН. КОВ, содержащее по каящрй обрабатываемой координате последовательно сое- диненнью датчик перемешевий, реверсивный счетчик и индикатор, а также блок ввода задания, первым выходом подключенный ко вторым входам реверсивных счетчиков, вторым выходом - ко входу запоминающего блока, выходы которого подключены к третьим входам реверсивных счетчиков, отличающеес я тем, что с целью расширения области применения устройства путем контроля линейных перемещений рабочего органа станка в , направлениях, не совпадающих с координатными осями, в него введены блок выбора текущей оси с наибольшим относительным перемещением, первый, второй и третий б1юки сравнения и по каждой обрабатываемой координате блок деления, управляе« мые ключ и формирователь команд, первый вход которого соединен с соответствух шим выходом sanoMHHaiCnuero блока и с первым входом блока деления по данной координате, выходом подключенного к первому входу блсжа сравнения и к первому входу управляемого ключа по данной коорпинате, второй вход которого соединен с соответствующим выходом блока выбора текущей оси с наибольшим переi .мещением, входами подключенного к выходу соответствующего блока сравнениа причем выход блока деления по первой кзоорпинате соединен с вторым входом, блока сравнения по третьей координате, выход блока делешя по второй координате - с вторым входом блока сравнения по первой координате выход блока деления по третьей коордшште - с вторым входом блока сравнения по второй координате, третий вход формирователя nooL 01 ключен к выходу реверсивного счетчика по данной коордшште, а выход - ico рбму Ёходу Еоздшсетора.
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Приспособление для разматывания лент с семенами при укладке их в почву | 1922 |
|
SU56A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Приспособление для точного наложения листов бумаги при снятии оттисков | 1922 |
|
SU6A1 |
