1
Изобретение относится к области автоматики и вычислительной техники и предназначено для использования в системах программного управления стенками с несколькими одновременно работающими инструментами.
Известен двухкоординатный линейный интерполятор, построенный на двоичных умножителях, который содержит постоянную память для хранения программ окружности единичного радиуса и устройства, позволяющие осуществлять умножение программы интерполяции окружности единичного радиуса на величину требуемого радиуса, и осуществляет линейную и круговую интерполяцию, но использует при этом принцип двоичного умножителя и хранения программы единичной окружности l.
Недостатком этого интерполятора является невозможность одновременного управления работой двух суппортов.
Известен также линейный интерполятор с изменяемой структурой, построенный на принципе двоично-десятичного умножителя.
Он может осуществлять одновременное управление работой нескольких рабочих органов (до трех), но не в состоянии обеспечить одновременное управление нарезанием двух цилиндрических резьб и круговую интерполяцию f2j.
Наиболее близким техническим решением к изобретению является линейно-круговой интерполятор, содержащий первый блок задания скорости, импульсный датчик к по каждой координате счетчик импульсов и последовательно соединенные управляющий ключ, реверсивный счетчик, блок ключей и сумматор, выход которого подключен к управляющему ключу другой координаты З
Недостатком такого интерполятора является его непригодность для одновременного управления работой двух инструментов, что приводит к необходимости использования в таких случаях двух дорогостоящих интерполяторов и сужает функциональные возможности интерполятора.
Целью изобретения является расширение функциональных возможностей линейно-кругового интерполятора.
Это достигается тем, что в интерполято введены второй блок задания скорости, первые элементы И, НЕ, ИЛИ, второй и третий элементы И, последовательно соединенные четвертый и пятый элементы И, втрой элемент НЕ и шестой элемент И и по каждой координате седьмой и восьмой элементы И, второй элемент ИЛИ и последовательно соединенные третий элемент НЕ, девятый элемент И и третий элемент ИЛИ. Причем выходы седьмого и восьмого элементов И каждой координаты через второй элемент
ИЛИ подключены ко входу счетчика импульсов данной координаты, выход счетчика импульсов первой координаты через четвертый элемент И подключен ко входу третьего элемента НЕ данной координаты и через последовательно соединенные первые элементы И и НЕ - к одному из входов восьмого элемента И данной координаты, соединенного со вторым блоком задания скорости, выход счетчика импульсов второй координаты подключен ко входу третьего элемента НЕ данной координаты и к одному из входов ПЯТОГ.О элемента И. Выход первого блока задания скорости соединен через второй элемент И со входом первого элемента ИЛИ, импульсный датчик подключен ко входам девятых элементов И и через третий элемент И - к другому входу первого элемента ИЛИ, выход которого через шестой элемент И подсоединен ко входу восьмого элемента И второй координаты и к одним из входов третьих элементов ИЛИ, выходы которых соединены с управляюшими входами блоков ключей соответствуюших координат. Выходы сумматоров подключены ко входам седьмых элементов И обеих координат, причем выходы сумматоров и выход восьмого элемента И перво координаты являются выходами интерполятора.
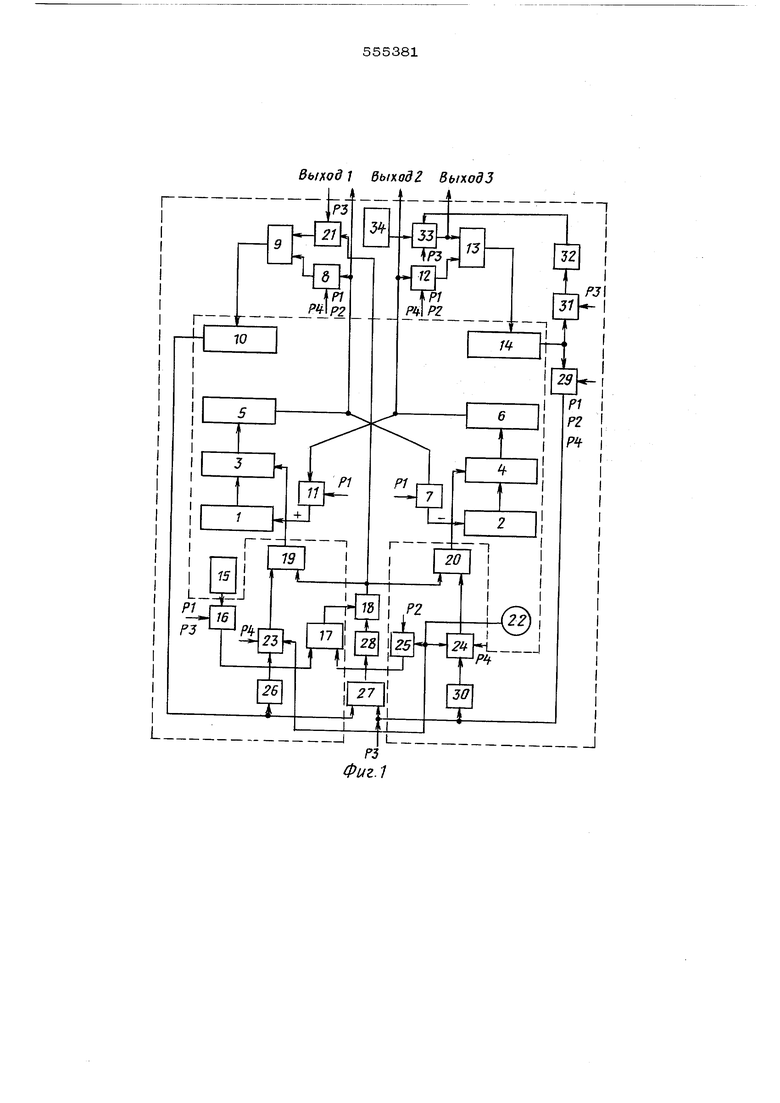
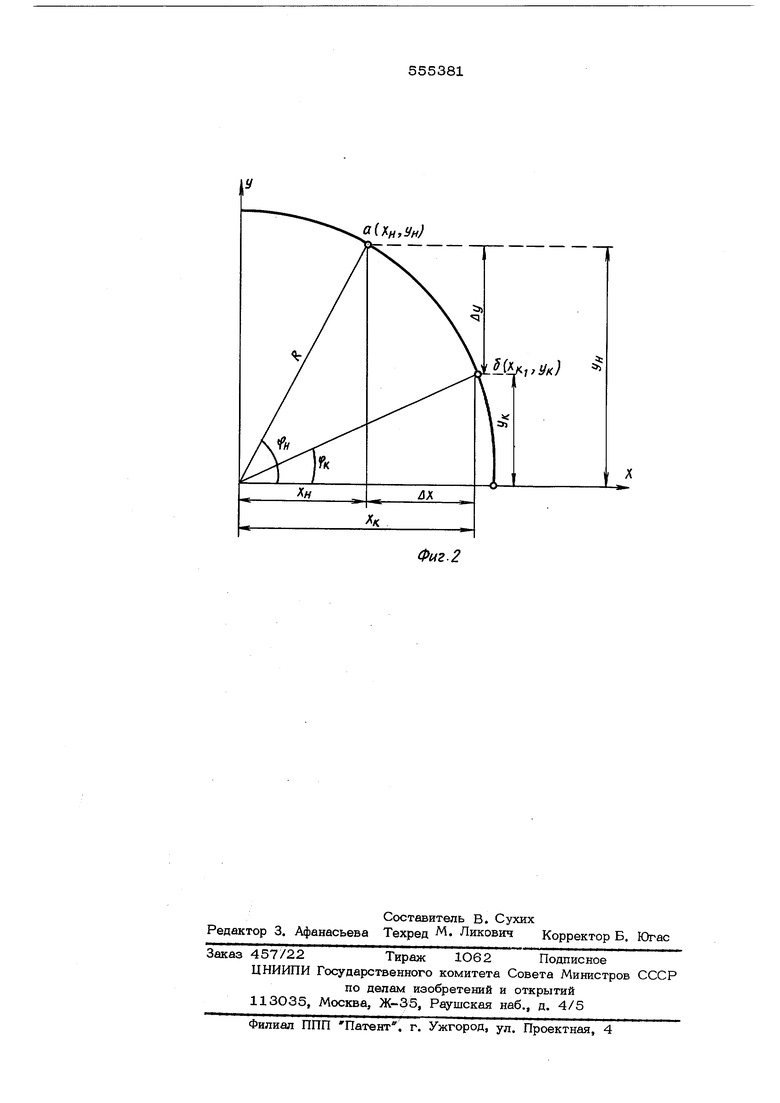
На фиг. 1 показана функциональная схема интерполятора; на фиг. 2 - четверть интерполируемой окружности с соответствующими обозначениями исходных и конечных точек участка круговой интерполяции.
Интерполятор состоит из реверсивных счетчиков 1, 2, кодовые выходы которых через блоки ключей 3, 4 присоединены ко входам сумматоров 5, 6.
Выход импульса переполнения сумматора 5 является первым выходом интерполятора и, кроме того, присоединен через управляющий клрч 7 ко входу реверсивного счетчика 2, а через седьмой элемент И 8 и второй элемент ИЛИ 9 - ко входу счетчика импульсов 10.
Выход импульса переполнения сумматора 6 является вторым выходом интерполятора и, кроме- ого, присоединен через уп-j- u ,
равляюший ключ 11 ко входу реверсивного счетчика 1, а через седьмой элемент И 12 и втрой элемент ИЛИ 13-ко входу счетчика импульсов 14. Выход первого блока задания скорости 15 через второй элемент И 16 и первый элемент ИЛИ 17 подключен к управляемому входу шестого элемента И 18, через третьи элементы ИЛИ 19 и 20 связан с управляющими входами блоков ключей 3 и 4, а через восьмой элемент И 21 - со вторым входом второго элемента ИЛИ 9,
Выход импульсного датчика 22 через девятые элементы И 23, 24 соединен со вторыми входами третьих элементов ИЛИ 19, 2О, а через третий элемент И 25 - со вторым входом первого элемента ИЛИ 17. Выход сигнала нулевого состояния (сигнала переполнения) счетчика 10 присоединен через третий элемент НЕ 26 к управляющему входу девятого элемента И 23, а через пятый элемент И 27 и второй элемент НЕ-28-к управляющему входу шестого элемента И 18.
Выход сигнала нулевого состояния (сигнала переполнения счетчика импульсов 14 присоединен через четвертый элемент И 29 и третий элемент НЕ 30 к управляющему входу девятого элемента 24 ко второму входу пятого элемента И 27, через первый элемент И 31 и НЕ 32 - к управляющему входу восьмого элемента И 33.
Второй блок задания скорости 34 связан через восьмой элемент И 33 с третьим выходом интерполятора и вторым входом второго элемента ИЛИ 13.
На фиг. 2 обозначены: Т - радиус интерполируемой окружности;Хн,Ун и Хк,Уккоординаты начальной и конечной точек участка интерполяции, а ф Фк УГЛЫ наклона радиуса Т к оси X в начальной и конечной точках.
Интерполятор может работать в четырех режимах за счет изменения своей структуры.
В первом режиме интерполятор представляет собой круговой интерполятор, построенный по принципу цифрового дифференциального анализатора, способный осуществлять одновременное управление работой только одного рабочего органа стакана.
Во втором режиме интерлолятор преобразуется в устройство управления нарезанием конических резьб, способное управлять нарезанием такой резьбы инструментом одного из рабочих органов.
В третьем режиме блоки интерполятора преобразуются в два совбфшенно независимых устройства, а именно, в линейный овухкоординатный интерполятор и устройство управпения прямолинейными перемещениями, причем каждое из устройств может осущест влять независимое управление, своим рабочим органом. В четвертом режиме блоки интерполятора преобразуются таким образом, что превра щаются в два совершенно независимых устро ства управления нарезанием цилиндрических резьб, каждое из которых может осуществлят управление отдельным рабочим органом. Рассмотрим работу предлагаемого интер полятора последовательно в каждом режиме. Для организации структуры, соответствующей первому режиму, в интерполятор вводится управляющий потенциал первого ре жима Р1, который открывает ключи 7, 11 и элементы И 8, 12, 16, 29, благодаря чему элемент 8 и элемент И 12 через эле менты ИЛИ 9, 13 подключают выходы сигналов переполнения сумматоров 5 и 6 ко входам счетчиков 1О, 14. Ключи 7, 11, открытые тем же потенциалом, реализуют перекрестные связи меж ду выходами импульсов переполнения сумм торов 5, 6 и входами реверсивных счетчиков 1, 2. Открытый элемент И 16 обеспечивает прохождение задающей частоты с выхода первого блока задания скорости 15 через элементы И 18 и элементы ИЛИ 19,20 к управляющим входам блоков ключей 3, 4. Улемент И 20 передает сигнал цулевого состояния счетчика 14 на вход элемента И 27. Работает круговой интерполятор следующим образом. Координаты исходной точки дуги (см. фиг. 2) Хн, Ун заносятся в прямом коде в реверсивные счетчики 1 и 2, соответственно, а величины Д У Уц илХ Хк-Хн в дополнительном коде-в счетчики 10 и 14 При этом единичный сигнал с выхода элемента НЕ 28 откроет элемент И 18 и час гота с выхода блока задания скорости 15 через элементы И 16, ИЛИ 17, И 18, ИЛ 19, 20 начинает поступать на управляющие входы блоков ключей 3 и 4. Каждый импульс, поступивший на входы ключей, вызывает суммирование текущих значений фукцийХ; 1 со5ф иУ- 15б пЧ);, храни мых в реверсивных счетчиках 1 и 2, с со держимым сумматоров 5 и 6, в которых н капливаются значения интегралов функций Чсозфссф и Т 5тфос(р вычисляемые в дискре t VHVH НОМ цифровом виде как сумма текущих значений функций X Х(ф) и У У(ф) при единичных приращениях аргумента, т.е. когда имеет место ф. ф, + 1. Импульсы переполнения сумматоров 5 и 6 являются выходными импульсами интерполятора по первому и второму выходу, соответственно, причем каждый импульс переполнения сумматора 5 подсчитывается счетчиком 1О и уменьшает на 1 текущее значение функции (пф; , хранимой в реверсивном счетчике 2. В то же время каждый импульс переполнения сумматора 6 подсчитывается счетчиком 14 и увеличивает на l текущее значение фyнкцииRcoб i,xpaнимoй в реверсивном счетчике 1. Благодаря этому осуществляется двойное интегрирование дифференциального управления вида у О, поэтому с выходов сумматоров 5, 6 снимаются унитарные коды, пропорциональные UV ARuiii p и ДХ-ДКСОЗР. Так будет продолжаться до тех пор, пока счетчики 1О, 14 не установятся в нулевое состояние и по цепи элементов И и НЕ 27, 28 закроется элемент И 18. В этот момент закончится интерполяция дуги (фиг. 2) инструмент переместится в точку с координатами Хк , УК Во втором режиме интерполятор представляет собой устройство управления нарезанием конических резьб. Для организации этой структуры в него вводится управляющий потенциал второго режима Р 2, который открывает элементы И 8, 12, 25, 29. Это обеспечивает поступление импульсов переполнения сумматоров 5 и 6 через элементы И 8 и 12 и элементы ИЛИ 9, 13 на входы счетчиков 1О, 14, связь выхода сигнала рулевого положения счетчика 14 через элемент И 29 со входом элемента И 27 и связь выхода импульсного датчика 22, установленного на шпинделе станка, через элементы И 25 и ИЛИ 17 со входом элемента И 18, При работе в этом режиме выходные импульсы датчика 22 с выхода элемента И 18 через элемент ИЛИ 19,20 поступают на управляющие входы блоков ключей 3, 4. Поступление каждого импульса на входы блоков ключей 3, 4 обеспечивает прибавление к содержимому сумматора 5 кода шага резьбы S , занесенного предварительно в реверсивный счетчик 1, а к содержимому сумматора 6 - кода подъема резьбы на оборот h , занесенного предварительно в реверсивный счетчик 2. В результате этого импульсы переполнения выходить с выходов с м аторов 5,6с частотой, пропорциональной S и К, что и обесTjaonnnT nft TmnrrnriTTH-nwATruwntt л w и. итп w пп(г печивает нужный режим движения резца. Счетчики 10, 14 определяют момент окончания нарезания резьбы и закрывают лемент И 18 по цепи элементов 27, 28. Это достигается бпагодаря занесению в них дополнительного кода длины резьбы L и ко нечного значения высоты подъема резьбы Н В третьем режиме интерполятор предста ляет собой комбинацию линейного двухкоор динатного интерполятора и устройства управления прямолинейными перемещениями, которые работают совершенно независимо. Для организации такой структуры в интерполятор вводится управляющий потенциал третьего режима РЗ, который открывает элементы И 16, 21, 31, 33 и посту пает на второй вход элемента И 27. Благодаря этому организуется связь первого блока задания скорости 15 через элементы И 16, ИЛИ 17, И 18, 21 и ИЛИ 9 с выходом счетчика 10, а также связь второго блока задания скорости 34 через элемент И 33 - с третьим выходом устройства и через элемент ИЛИ 13 - со вхо дом счетчика 14. Линейный интерполятор работает следующим образом. Величины перемещений дХ и лУ заносятг ся в счетчики 1 и 2. Счетчик 10, период которого равен объему сумматора 5 (б), устанавливается в состояние цуля. Импульсы с выхода блока 15 по цепи элементов 16, 17, 18, 29, 20 поступают на управляющие входы блоков ключей 3, 4 и, одновременно, через элементы И 21 и ИЛИ 9 на вход счетчика 1О. При этом коды приращений суммируются в сумматорах 5, 6, а импульсы переполнения сумматоров являются унитарными кодами, поступающими на выходы. Особенностями линейного интерполятора по сравнению с другими линейнъ1ми интерполяторами, построенными на принципе ЦДЛ (цифро-дифференциального анализатора)является способ определения момента окончания отработки участка, основанный не на подсчете количества выходных импул сов на выходе каждой координаты, а на подсчете количества суммирований величин АХ и лУ которое должно быть равно объ ему сумматора. Действительно можно записать:,,.., лХРг .. .,, ДУ где Р - объем сумматора. Следовательно, когда на элемент И 27 поступит с выхода счетчика 1О сигнал, закрывающий элемент И 18, с первого и второго выходов интерполятора уйдет количество импульсов, точно равное ДХ и Устройство управления линейными перемещениями работает следующим образом. Величина перемещения в дополнительном коде заносится в счетчик 14, Импульсы частоты, определяющей скорость подачи с выхода второго блока задания скорости 34, через элемент И 33 поступают на третий выход устройства и через элемент ИЛИ 13на вход счетчика 14. Сигнал переполнения счетчика 14 по цепи элементов 31, 32 закръюает элемент И 33. Отработка линейного участка заканчивается. В четвертом режиме интерполятор работает как два совершено независимых устройства управления нарезанием цилиндрической резьбой. Для этого в интерполятор вводится управляющий потенциал четвертого режима Р4, который открывает элементы И 8, 12, 23, 24, 29. Величина щагов нарезаемых резьб 6.J И j заносится в реверсивные счетчики 1, 2, длины нарезаемых резьб LjjHLg- в счетчики 10, 14. Нарезание резьбы осуществляется за счет поступления импульсов с выхода датчика 22 через элементы И 23, 24 на управляющие входы блоков ключей 3, 4. Благодаря этому кодъ1 резьб суммируются в сумматорах 5, 6 и импульсы переполнения сумматоров являются выходными унитарными кодами. Выходные импульсы подсчитьюаются счегчиками 10, 14, а сигналы переполнения этих счетчиков закрывают через элементы НЕ 26 или 30 элементы И 23 или 24, соответственно, при этом нарезание соответствующей резьбы заканчивается. Так как менее 5% деталей содержат сферические поверхности и менее 1% - конические резьбы, то основными режимами работы интерполятора являются третий я четвертый режимы, использование которых позволяет осуществлять одновременное управление работой двух инструментов фактически одним интерполятором и делает применение второго интерполятора не «ужным, что обеспечивает значительное снижение стоимости системы. Формула изобретения Линейно-круговой интерполятор, содержащий первый блок задания скорости, импульсный датчик и по каждой координате счегчик импульсов и последовательно соединенные управляющий ключ, реверсивный счетчик, блок ключей и сумматор, выход которого подключен к управляющему ключу другой координаты, отличающийся тем, что, с целью расширения функциональных возможностей, в него введены второй блок задания скорости, первые элементы
И, НЕ, ИЛИ, BTopoifH третий элементы И, последовательно соециненные четвертый и пятый элементы И, второй элемент НЕ и шестой элемент И и по каждой координате седьмой и восьмой элементы И, второй элемент
ИЛИ и последс ательно соединенные третий элемент НЕ, девятый элемент И и третий элемент ИЛИ, причем выходы седьмого и восьмого элементов И каждой координаты через втqpoй элементИЛИ подключены ко входу счетчика импульсов данной координаты, выход счетчика импульсов первой координаты через четвертый элемент И подключен ко входу третьего элемента НЕ данной координаты и через последовательно соединенные первые элементы И и НЕ - к одному из входов восьмого элемента И данной координаты, соединенного со вторым блоком задания скорости, выход счетчика импульсов второй координаты подключен ко входу третьего элемента НЕ данной координаты и к одному из входов пятого элемента И, выход первого блока задания скорости соединен через второй элемент И со входом первого элемента ИЛИ, импульсный
датчик подключен ко входам девятых элементов И и через третий элемент И к другому входу первого элемента ИЛИ, выход которого через шестой элемент И подсоединен ко входу эосьмого элемента И второй координаты и к одним из входов третьих элементов ИЛИ, выходы которых соединены с управляющими входами блоков ключей соответствующих координат, выходы сумматоров подключены ко входам седьмых элементов И обеих координат, причем выходы сумматоров и выход восьмого элемента И первой координаты являются выходами интерполятора.
Источники информации, принятые во внимание при экспертизе:
1.Авторское 9ридетельство СССР № 260973 М. K;f G 06 Q- 7/30 от 26.08.68 г.
2.Авторское свидетельство СССР NS 503211, М. Кл. G 05 В 19/18 от 03.09.73 г.
3.Дригваль П. П. Цифровые дифференциальные анализаторы . М., Советское радио , 1970 г. стр 7-8, 395.
Выход J Выход2 ВыходЗ
1
J
Т
Фи2.2
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для программного управления | 1986 |
|
SU1376065A1 |
| Цифровой интерполятор | 1986 |
|
SU1310778A1 |
| Устройство для двухкоординатного программного управления | 1981 |
|
SU962857A1 |
| Устройство для программного управления | 1984 |
|
SU1193643A1 |
| Интерполятор | 1978 |
|
SU813365A1 |
| Устройство для программного управления | 1986 |
|
SU1397878A1 |
| Система программного управления станками | 1973 |
|
SU503211A1 |
| Линейно-круговой интерполятор | 1978 |
|
SU746431A1 |
| Устройство для программного управления станком | 1980 |
|
SU920641A1 |
| Устройство для программного управления | 1986 |
|
SU1317399A1 |