Предлагаемый автомат для контроля и сортировки твердых выпрямительных элементов по электрическим параметрам принадлежит к типу автоматов того же назначения, имеющих два одинаковых испытательно-сортировочных канала, снабженных контактными щупами, и переключающий механизм, позволяющий использовать время, затрачиваемое на перемещение элементов в одном канале, для производства их измерения в другом канале, и наоборот.
Особенностью предлагаемого автомата, обеспечиваюп1ей возможность сортировки мелких выпрямительных элементов, яв тяется выполнение каналов в виде поворотных транспортерных дисков, снабженных гнездами ДЛЯ испытуемых элементов п получающих HiaroBbie перемещения от переключающего механизма. В качестве последнего применена движущаяся возвратно-поступательно каретка, связанная реечно-шестеренчатой передачей с валиком, несупщм эксцентрики, периодически прижимаюп1ие П1упы к элементам в периоды остановки транспортерных дисков.
Особенностью автомата является также выполнение транспортирующих дисков с двумя рядами гнезд, в которые элементы поступают в зависимости от их полярности, благодаря чему исключается ручная ориентация полярностн элементов и тем самым обеспечивается noBbuneinie производительности автомата.
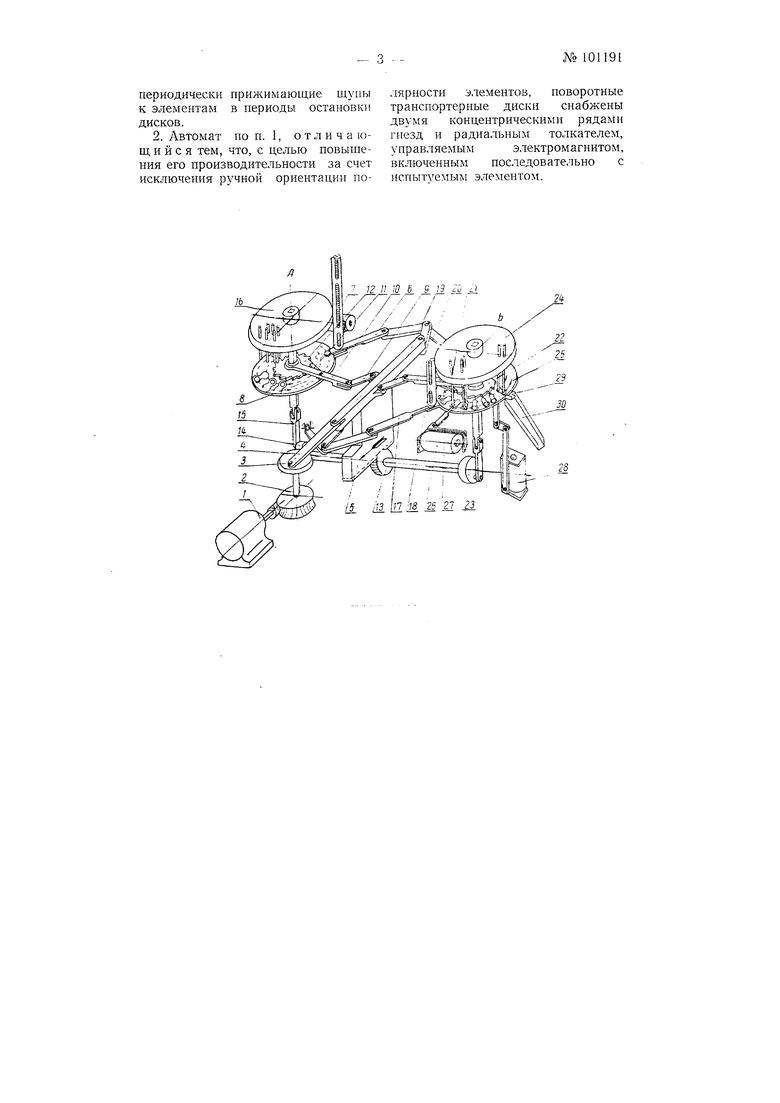
Кинематическая схема предлагаемого автомата представлепа па чертеже, на котором буквами А и Б обозначены два одинаковых испытательно-сортировочных канала.
Вращение от электродвигателя / через понижающий редуктор 2 передается эксцентрику 5, который при помощи тяги 4 сообщает возвратиопоступательиое движение ведущей каретке 5. Каретка при движенщт в направлении, показанном стрелкой, через рычажную передачу перемещает в канале А пшберную рейку (J, которая, выбирая очередной элемент из загрузочной трубки 7, подает его в гнездо внешнего концентрического ряда гнезд в транспортерном диске
8. От каретки 5 гюлзчает движение также и тяга 9, которая поводком 10 заводит зуб 11 за очередной зуб храповика 12. Шестеренка 13, сцепленная с зубчатой рейкой каретки 5, поворачивает эксцептрик 14, который при помощи тяги 15 поднимает колодку 16 со щупами.
В это время в канале Б щиберная рейка 17 переходит в положение подготовки подачи элемента из загрузочной трубки 18. Тяга 19 поводком 20 переводит за зуб 21 на очередной щаг храповнк 22; эксцентрик 23, насаженный на общий с нгестеренкой 13 валнк, переводит колодку 24 со щупами в крайнее нижнее положение. В этом положении щупы подключают измеряемые элементы, паходяп1,иеся в обоих рядах транснортерного диска 25. к электроизмерительной схеме.
Таким образом, в то время, когда в канале А производится перемещение измеряемых элементов, в канале Б производится измерение, и наоборот. Так 1сак щупы включены параллельно, то измерительная схема автомата оказывается загруженной непрерывно.
Для пояснения процесса измерения элементов ниже рассматривается порядок измерения их в канале Б (так как оба канала совершенно одинаковы, то измерение в канале А ничем не отличается от измерения в канале Б).
Шиберная рейка 17, выбирая нз загрузочной трубки 18 очередной элемент, подает его в гнездо внещнего ряда гнезд транспортерпого новоротного диска 25. При перемещении этого элемента диском 25 на очередную позицию па этот элемент включается щуп для определения полярности элемента. Для определения полярности используются выпрямительные свойства самого элемента. Еслн через элемент проходнт ток (в прямом нанравленин), то срабатывает механизм определения полярности, состоящий из электромагнита 26 с радиальным то.1кателем 27, включенного в цепь последовательно с испытуемым элементом. При освобождении элемента и;ч-г;од щупа прп
движении колодки 24 вверх толкатель 27 переводит элемент в гпездо внутреннего ряда гнезд. Прп обратном полол енни элемента механизм определения полярпости не срабатывает, и элемент остается во внешнем гнезде. Таким образом, щуп и механизм определения полярности направляют поступающие элементы, в зависимости от их полярности, в гнезда того или иного ряда. Измерительные щупы колодки 24 расположены то же в два ряда и включены в измерительную схему в соответствии полярностью обоих рядов.
Последуклпие измерения осуществляются электроизмерительной схемой, не показанной на чертеже.
Сортировка элементов по результатам измерения производится при помощи исполнительных электромагнитов. Заправляющих заслонками, через которые элементы поступают в соответствующие лоткп и далее в соответствующие приемники классов и групп.
Па чертеже показан один из таких электромагнитов 28, управляющий заслонкой 29, через которую элемент поступае-1 на лоток 30.
Предмет изобретения
1. Автомат для контроля и сортировки твердых выпрямительных элементов но электрическим параметрам, имеющий два одинаковых испытательно-сортировочных канала, набженных контактными щупами, и переключающий механизм, позволяющий использовать время, затрачиваемое на неремещение элементов в одном канале, для производства их измерения в другом канале и наоборот, отличающийся тем, что, с целью возможности применения автомата для сортировки мелких выпрямительных элемептов, каналы представляют собой поворотные ранспортерные диски с гнездами ля испытуемых элементов, получающие щаговые перемещения от переключающего механизма, выполенного в виде движущейся возврато-поступательно каретки, связанной реечно-шестеренчатой передачей валиком, песущим .ентрики.
периодически прил :имаюш,ие щупы к элементам в периоды остановки дисков.
2. Автомат по п. 1, отличающийся тем, что, с целью повышеПИЯ его производительпости за счет исключения ручной ориентации полярности элементов, поворотные транспортерные диски снабжены двумя концентрическими рядами 1незд и радиальпым толкателем, управляемымэлектромагнитом,
включенным последовательно с испытуемым элемептом.