Известны устройства для сортировки селеновых элементов по их электрическим параметрам с помощью накладываемых на них контактных щупов, включенных в электрическую цепь контроля и управления.
В частности, в авт. св. 90905 того же автора описано устройство для автоматической формовки селеновых элементов, в котором разбраковка элементов по их действительному состоярщю (формованные, недоформованпые и закороченные) производится с помощью указанных выше контактных щупов и рычагов, управляющих механизмом перемещения элементов вдоль контрольно-сортировочного канала.
С целью увеличения производительности подобных устройств, достигаемого путем использования времени, затрачиваемого на перемещение элементов в одном канале, для производства измерения элементов в другом канале, и наоборот, предлагается в автомате для контроля и сортировки по электрическим параметрам селеновых элементов, перемещаемых вдоль каналов, в которых: расположены периодически накладываемые на элементы контактные щупы, включенные в электрическую измерительную схему, применить переключающий механизм, выполненный в виде каретки, соверщающей возвратно-поступательные перемещения в двух взаимно перпендикулярных направлениях. При перемещении в направлении, перпендикулярном к оси Каналов, каретка в своих конечных положениях отводит контактные щупы от находящихся в соответствующем канале элементов и вводит в промежутки между ними гребенку, которая при продольном движении каретки перемещает элементы вдоль канала.
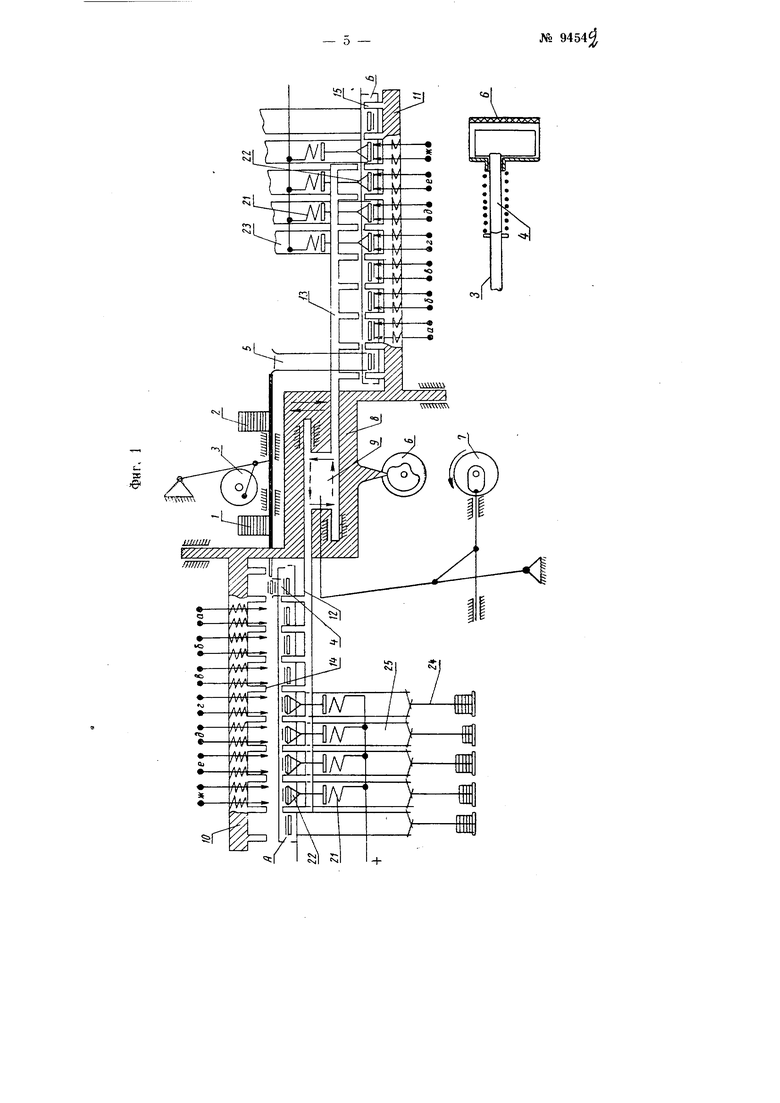
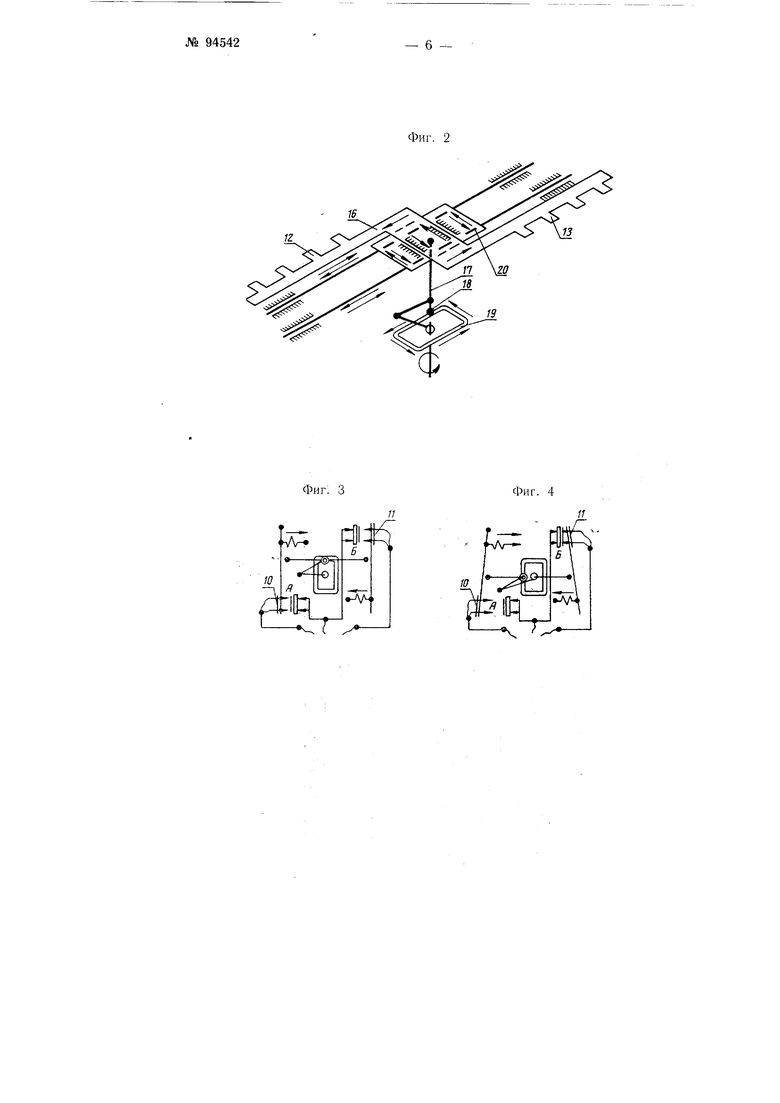
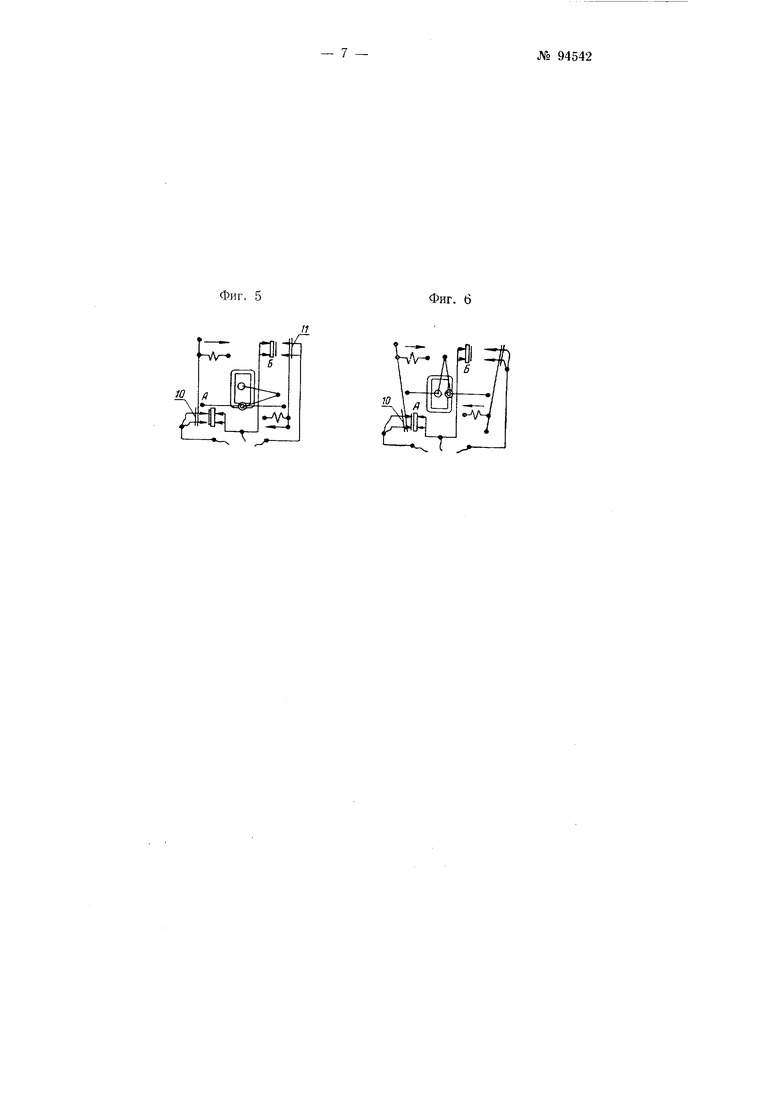
На фиг. I изображен схематически вид сверху предлагаемого устройства; на фиг. 2 - один из возможных вариантов выполнения механизма привода каретки, в перспективе; на фиг. 3-6 схематически показаны четыре положения контактных щупов, соответствующие различным положением каретки.
Предлагаемый автомат имеет Лва контрольно-сортировочных канала А и Б (фиг. 1), снабженные каждый отдельными загрузочными и приемными бункерами. Для нодачи селеновых элементов, загруженных в бункеры 7 и 2, в каналы А и Б служит толкатель, приводимый в возвратно-поступательное движение с помощью кривошипного механизма 3, насаженного на непрерывно вращающийся вал. За каждый оборот вала из загрузочных бункеров ) и 2 поочередно подаются селеновые элементы, которые по направляющим лоткам 4 к 5 поступают в контрольно-сортировочные каналы Л и б.
На одном валу с диском кривощнпного механизма 3 закреплены эксцентрики 6 и 7, управляющ,ие движением каретки, совершающей возвратно-поступательные перемещения в двух взаимно перпендикулярных направлениях. Каретка состоит нз двух подвижных один относительно другого мостиков 8 и 9. Мостик 8 (для ясности на фиг. 1 показан заштрихованным), управляемый эксцентриком 6, перемещается вместе со вторым мостиком 9 в поперечном к оси каналов Л и направлении (показанном сплошными стрелками). Мостик 9 управляется эксцентриком 7 и перемещается в направляющих, закрепленных на мостике 8, в направлении, параллельном продольной оси каналов А к Б (показанном пунктирными стрелками).
С мостиком 8 жестко или с помощью передачи связаны колодки 10 и //, несущие контактные щупы, включенные в электрическую измерительную схему. К мостику 9 прикреплены гребенки 12 и 13, служащие для перемещения селеновых элементов вдоль контрольно-сортировочных каналов. Для фиксации селеновых элементов во время измерения колодки со щупами могут быть снабжены гребенками, фиксирующие зубья 14 VI 15 которых удерживают элементы в процессе измерения.
В показанном на фиг. 2 варианте выполнения каретки к верхнему мостику 16 нрсущему гребенки 12 и 13, снизу прикреплен стержень 17, снабженный на нижнем конце роликом 18, перемещающимся в направляющей канавке 19, образующей замкнутый прямоугольный контур. Стержень 17 получает движение посредством поводка и тяги от непрерывно вращающегося вала. Мостик 20 связан с колодками 10 и 11 (не показанными на фиг. 2) и имеет возможность перемещения только в направлении, перпендикулярном оси каналов Л и Б.
Диск кривошипного механизма 3 и эксцентрики 5 и 7 закреплены на общем валу таким образом, что за время подачи в каналы А и Б селеновых элементов из бункеров 1 и 2 толкателем, управляемым кривошипным механизмом 3, эксцентрик б, взаимодействуя с упором на мостике 8, перемещает каретку вместе с мостиком 9 в направлении, перпендикулярном к оси каналов, из одного крайнего положения в другое.
Это соответствует на фиг. 2 перемещению ролика 18 вдоль короткой (верхней) ветвн направляющей канавки 19 и движению каретки (обоих мостиков 16и 20) в направлении, перпендикулярном оси каналов.
При этом щупы, монтированные на колодке //, накладываются на находящиеся в канале Б элементы и таким образом включаются в электрическую схему, а соответствующая гребенка 13 выходит из зацепления с этими элементами.
В то же время в канале Л колодка 10 с контактными щупами отводится от находящихся в этом канале элементов, а гребенка 12 своими зубьями входит в пространство между ними.
Вслед за этим при неподвижном мостике 8 нод действием эксцентрика 7 приходит в движение мостик 9 в направлении, параллельном оси каналов (справа налево), что влечет за собой перемещение гребенок 12 и 13 вдоль каналов. При этом сцепленная с селеновыми элементами гребенка 12 в канале Л перемещает эти элементы на следующую позицию. В варианте по фиг. 2 соответствующее перемещение мостика 16 осуществляется в результате движения ролика 18 вдоль длинной (левой) ветви направляющей канавки 19. При этом контактные щупы, монтированные на кололке 11, из нейтрального положения, показанного на фиг. 3, переходят в положение, показанное на фиг. 4. В этом положении селеновые элементы, находящиеся в канале Б, включены в электрическую схему, а элементы, находящиеся в канале Л, от нее отключены. Вслед за тем мостик 8 (вместе с мостиком 9 вновь перемещается в направлении, перпендикулярном осн каналов Л и 5, и переходит в положение, противоположное показанному на фиг. 1. Это движение в варианте по фиг. 2 осуществляется при перемещении ролика 18 вдоль короткой (нижней) ветви направляющей канавки. На фиг. 5 показано промежуточное положение - колодка // отходит от элементов, находящихся в канале Б, а колодка 10 приближается к элементам, находящимся в канале Д. Мостик 9, перемещаясь вместе с мостиком 8, выводит зубья гребенки 12 из зацепления с находящимисяВ канале А селеновыми элементами и вводит гребенку 13 в канал , где она сцепляется с находящимися в этом канале элементами. Затем мостик 9 перемещается под действием эксцентрика 7 из крайнего левого в крайнее правое положение, что влечет за собой перемещение селеновых элементов в канале Б гребенкой 13 на следующую измерительную позицию. В варианте по фиг. 2 это соответствует перемещению ролика 18 вдоль длинной (правой) ветви направляющей канавки 19. При этом, как показано на фиг. б, колодка 10 с контактными щупами взаимодействует с селеновыми элементами, находящимися в канале А, а селеновые элементы в канале Б отключены и переходят на следующую измерительную позицию. Таким образом при непрерывном вращении ведущего вала мостик 8 (16 на фиг. 2) соверщает возвратнопоступательные перемещения в направлении, . перпендикулярном оси каналов Л и Б, производя при этом поочередное включение селеновых элементов, находящихся в этих каналах, в измерительную схе.му. Связанный с мостиком 8 мостик 9 (20 на фиг. 2), перемещаясь вместе с мостиком 8, поочередно вводит в каналы Л и гребенки 12 и /. Мостик 9 в промежутках между перемещениями мостика 8 соверщает возвратно-поступательные перемещения в направляющих, закрепленных на мостике 8, в направлении, нараллельпом оси каналов Л и Б, и производит периодическое перемещение селеновых элементов в этих каналах на следующую нознцню измерения. Так как Щ)ны обеих колодок 10 и 11, расположенных в каналах А к Б. поочередно приходят во взаимодействие с селеновыми элементами и. следовательно, поочередно включаются в электрическую измерительную схему, то это дает воз.можность иметь одну общую из.мерительную схему на оба канала. Щупы колодок 10 и 11 включены в эту схему параллельно, как это показано на фиг. 3-6. В измерительную схему включеньгисполнительные электромагниты 21, управляющие соответствующими заслонками 22. Срабатывание того или иного электромагнита 21 вызывает открытие соответствующей ему заслонки 22, через которую селеновьп элемент, находящийся в это время в контрольно-сортировочном канале., попадает в лоток 23. Из лотка 2о селеновый элемент поступает на приемную щпильку 24. Цифрой 25 обозначено устройство, центрирующее щпильку 24. Сортировка селеновы.х элементов в результате их перемещения и измерения происходит следующим образом. Если селеновый элемент, измеряемый на первой позиции измерения, соответствует параметрам, присвоенным этой позиции, то исполнительный электромагнит 21 срабатывает и открывает соответствующую ему заслонку 22. При этом селеновый элемент поступает на приемную щпильку 24 данной позиции. Если селеновый элемент по своим параметрам этой позиции не соответствует, он перемещается на следующую, на которой так же подвергается измерению, и т. д. Так как селеновые элементы в процессе измерения по их параметрам требуют определенной выдержки времени под током измерения, то с целью сокращения времени измерения могут быть предусмотрены отдельные позиции, расположенные в контрольно-измерительных каналах перед позициями измерения. На фиг. 1 на позициях а, б и в производится необходимая выдержка селеновых элементов под током измерения, а на позициях г, д, е, ж - измерение, т. е. измерение начинается с четвертой позиции.
Количество позиций на фиг. 1 показано условно и выбирается в соответствии с требованиями, предъявляемыми к сортировке.
Устройство может быть снабжено предупредительной и исполнительной сигнализацией.
При недостаточной загрузке селеновыми элементами бункеров 1 н 2, перегрузке приемников и прочих неисправностях подается сигнал, требующий вмешательства оператора, или сигнал остановки.
Предмет изобретения Автомат для контроля и сортировки по электрическим параметрам селеновых элементов, перемещаемых поступательно по двум каналам, в которых расположены периодически накладываемые на них контактные щупы, включенные в электрическую измерительную схему, отличающийся тем, что, с целью увеличения производительности автомата, применен переключающий механизм, выполненный в виде совершающей возвратно-поступательные перемещения в двух взаимно перпендикулярных направлениях каретки, отводящей в конечных положениях при ее перемещениях в направлении, перпендикулярном оси каналов, контактные щупы от находящихся в соответствующем канале элементов, и снабженной гребенками, входящими при этом в промежутки между элементами и служащими для перемещения элементов вдоль каждого канала при движении каретки в направлении, параллельном оси каналов.
ж
H:iAr: J
&
т
1ЛГ }-/w
-Av
Фиг. 2