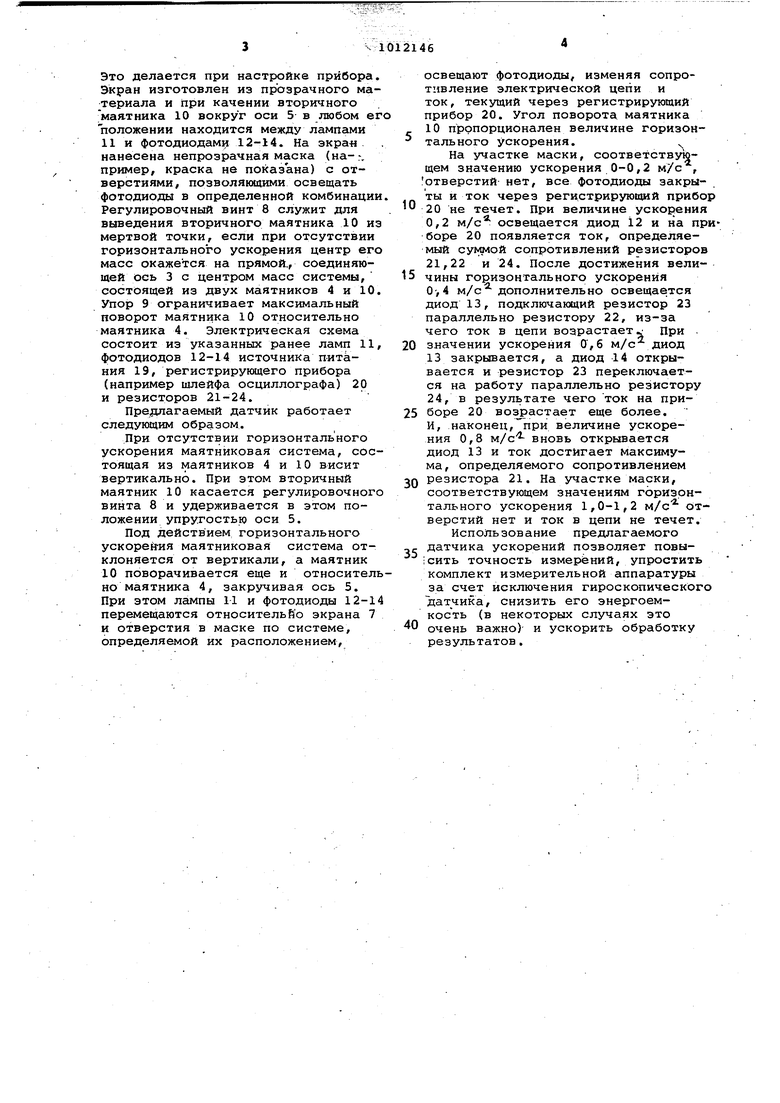
Изобретение относится я измере ниям ускорений и может быть исполь зовано при испытаниях транспортных средств. При испытаниях транспорт ных средств необходимо определять горизонтальные, ускорения, действукнц на них. Например при испытаниях автомобилей такие ускорения необходимо определять при тормозных испытаниях и прм определении управ ляемости, где горизонтальные ускорения являются основным параметром Известен датчик горизонтальных ускорений, содержащий маятник, свя занный с измерительной системой. При работе маятник отклоняется под действием горизонтального ускорени При этом угол отклонения пропорцио нален величине ускорения и служит мерой ускорения 1. Однако, использование .таких дат чиков при испытании транспортных средств, имеющих упругую подвеску не обеспечивает высокой точности измерений и требует усложнения комплекса измерительной аппаратуры. Это происходит потому, iTO такие транспортные средства, например автомобили,, при действии на них горизонтальных ускорений наклоняюгся и угол их наклона, складываясь с углом наклона маятника по отношению к геодезической вертикали, дает искаженное значени измеряемого.ускорения. При этом ош ка может достигать 12-15%, Для ком пенсации это-й погрешности в комплекс измерительной аппаратуры включают гироскопический датчик наклона и электрическую схему компенсации, либо прибегают .к ручно му пересчету при обработке резуль татов . Эти мероприятия снижают точ ность измерений, усложняют и повышают его энергоемкость, .Известен также датчик, содержащий маятник связанный с измерительным элементом, измеряющим силу, действующую, вдоль маятника. Эта сила, являясь геометрической суммой силы тяготения маятника и перпендикулярной ей силы инерции от горизонтального ускорения, возникающей при действии iоризонтального ускорения, отклоняющего маятник,не зависит от наклона испытуемого транспортного средства Однако, зависимость данной силы от измеряемого ускорения весьма нелинейна. Например, при изменении бокового ускорения от 1,0 м/с до 10 м/с , т.е, в 10 раз указанная си ла изменяется в 82 раза, но в диапазоне О - 1,0 м/с всего лишь на 0,015 от своего значения при боковом ускорении, равном 10 м/c , Сто71ь высокая нелинейность снижает точность измерений, так одной стороны, известные датчики сил не обеспечивают высокой точности измерений в столь большом диапазоне изменения силы, а,с другой стороны, необходимая для исправления нелинейности система электронного пересчета (при приемлемой для данно- . го случая ее сложности и стоимости) дополнительно примерно на 3% снижает точность измерения. Наиболее близким к изобретению по технической сущности является датчик ускорения, содержащий свободно подвешенный маятник, упруго связанный с ним дополнительный маят.ник и узел преобразования перемёще-, НИИ дополнительного маятника 3, Однако прототип также характеризуется недостаточной точностью измерения вследствие нелинейности. Целью изобретения является повышениё .точности измерения ускореЦель достигается тем, что в датчике ускорений, содержащем свободно подвешенный маятник, упруго связанный с ним дополнительный маятник и узел преобразования перемещений дополнительного маятника, ось подвеса дополнительного маятника расположена ниже оси додвеса основного маятника, а центры масс обоих маятников расположены между осями их подвесов. На фиг,1 изображен датчик, разрез А-А на фиг,2; на фиг.2 - разрез Б-Б на фиг,1; на фиг,3 - вид Г на фиг. 2; .на фиг, 4 - разрез В-В на фиг,1; на фиг.5 - электрическая схема измерительной системы. Датчик состоит из корпуса 1, закрепленного на испытуемом транспортном средстве (не показано), В корпусе на кронштейне 2 и оси 3 подвешен основной маятник 4, несущий ось 5,ее опору 6,экран 7, регулировочный винтВ и упор 9. На оси 5 установлен дополнительный маятник 10, с прикрепленными к нему лампс1ми 11 и фотодиодами 12-14, входящими в измерительную систему.,, / Ось 5 одним концом 15 неподвижно (например пайкой) соединена с маятником 10, Другой ее конец защемлен в опоре б при помощи пяти 16, винта 17, заворачиваемого в квадратную гайку18, Все остальные места контакта оси 5 с деталями устройства выполнены с зазором. Ось 5 изготовлена из упругого материала и работает как торсион. При отпущеном винте 17, он сам, пята 16 и гайка 18 могут перемещаться вдоль опоры 6, изменяя точку защемления оси -5, т,е, ее длину, что влечет изменение ее угловой жесткости.
Это делается при настройке прибора. Экран изготовлен из прозрачного материала и при качении вторичного маятника 10 вокруг оси 5 в любом ег положении находится между лампами 11 и фотодиодам 12-14. На экра« нанесена непрозрачная маска (на-г. пример, краска не показана) с отверстиями, позволяющими освещать фотодиоды в определенной комбинации Регулировочный винт 8 служит для выведения вторичного маятника 10 из мертвой точки, если при отсутствии горизонтального ускорения центр его масс окажется на прямой., соединяющей ось 3 с центром масс системы, состоящей из двух маятников 4 и 10. Упор 9 ограничивает максимальный поворот маятника 10 относительно маятника 4. Электрическая схема состоит из указанных ранее ламп 11, фотодиодов 12-14 источника питания 19, регистрирующего прибора (например шлейфа осциллографа) 20 и резисторов 21-24.
Предлагаемый датчик работает следующим образом.
При отсутствии горизонтального ускорения маятниковая система, состоящая из маятников 4 и 10 висит вертикально. При этом вторичный маятник 10 касается регулировочного винта 8 и удерживается в этом положении упругостью оси 5.
Под действием горизонтального ускорей-ия маятниковая система отклоняется от вертикали, а маятник 10 поворачивается еще и относительно маятника 4, закручивая ось 5. При этом лампы 11 и фотодиоды 12-14 перемещаются относительно экрана 7 и отверстия в маске по системе, определяемой их расположением.
освещают фотодиоды, изменяя сопротивление электрической цепи и ток, текущий через регистрирующий прибор 20. Угол поворота маятника 10 пропорционален величине горизонтального ускорения.
На участке маски, соответствующем значению ускорения 0-0,2 м/с , отверстий- нет, все фотодиоды закрыты и ток через регистрирующий прибор
20 не течет. При величине ускорения 0,2 м/с освещается диод 12 и на приборе 20 появляется ток, определяемый сукмой сопротивлений резисторов 21,22 и 24. После достижения величины горизонтального ускорения м/с дополнительно освещается диод 13, подключающий резистор 23 параллельно резистору 22, из-за чего ток в цепи возрастает При .
значении ускорения О , б м/с диод 13 закрывается, а диод 14 открывается и резистор 23 переключается на работу параллельно резистору 24, в результате чего ток на приборе 20 возрастает еще более. И, наконец, при величине ускорения 0,8 м/с вновь открывается диод 13 и ток достигает максимума, определяемого сопротивлением
резистора 21. На участке маски, соответствующем значениям горизонтального ускорения 1,0-1,2 м/с отверстий нет и ток в цепи не течет.
Использование предлагаемого датчика ускорений позволяет повысить точность измерений, упростить комплект измерительной аппаратуры за счет исключения гироскопического датчика, снизить его энергоемкость (в некоторых случаях это
очень важно)- и ускорить обработку результатов.
fcjg
ff 23
/ /
nm -/4,/
ю
7Г
iPus.
ВиОГ
PU8.3
| название | год | авторы | номер документа |
|---|---|---|---|
| ЛИНЕЙНЫЙ МИКРОАКСЕЛЕРОМЕТР | 2016 |
|
RU2629654C1 |
| Акселерометр космический | 2019 |
|
RU2721589C1 |
| УСТРОЙСТВО ДЛЯ ИЗУЧЕНИЯ ЗАКОНОВ ВРАЩАТЕЛЬНОГО ДВИЖЕНИЯ | 2006 |
|
RU2309462C1 |
| Наклономер | 1990 |
|
SU1812427A1 |
| Устройство для установки датчика ускорений | 1981 |
|
SU1025717A1 |
| Компенсационный маятниковый акселерометр | 1985 |
|
SU1286902A1 |
| ИНТЕГРАЛЬНЫЙ ЧУВСТВИТЕЛЬНЫЙ ЭЛЕМЕНТ АКСЕЛЕРОМЕТРА | 2010 |
|
RU2431850C1 |
| Компенсационный акселерометр | 2017 |
|
RU2690708C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ ПРЕЦИЗИОННОГО КВАРЦЕВОГО МАЯТНИКОВОГО АКСЕЛЕРОМЕТРА | 2013 |
|
RU2533752C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ВЕЛИЧИНЫ НЕЛИНЕЙНОСТИ ХАРАКТЕРИСТИКИ КОМПЕНСАЦИОННЫХ АКСЕЛЕРОМЕТРОВ С МАГНИТОЭЛЕКТРИЧЕСКИМ ОБРАТНЫМ ПРЕОБРАЗОВАТЕЛЕМ | 1985 |
|
SU1344052A1 |
УСКОРЕНИЙ, содержащий свободно подвешенный маятник, упруго связанный с ним дополнительный маятник и узел преобразования iперемещений- дополнительного маятника, отличающийся тем, что, с целью повьраения точности измерения ускорений ось подвеса дополнительного маятника расположена ниже оси подвеса основного маятника, а центры масс обоих маятников расположены между осями их подвесов. (Л to 4;: 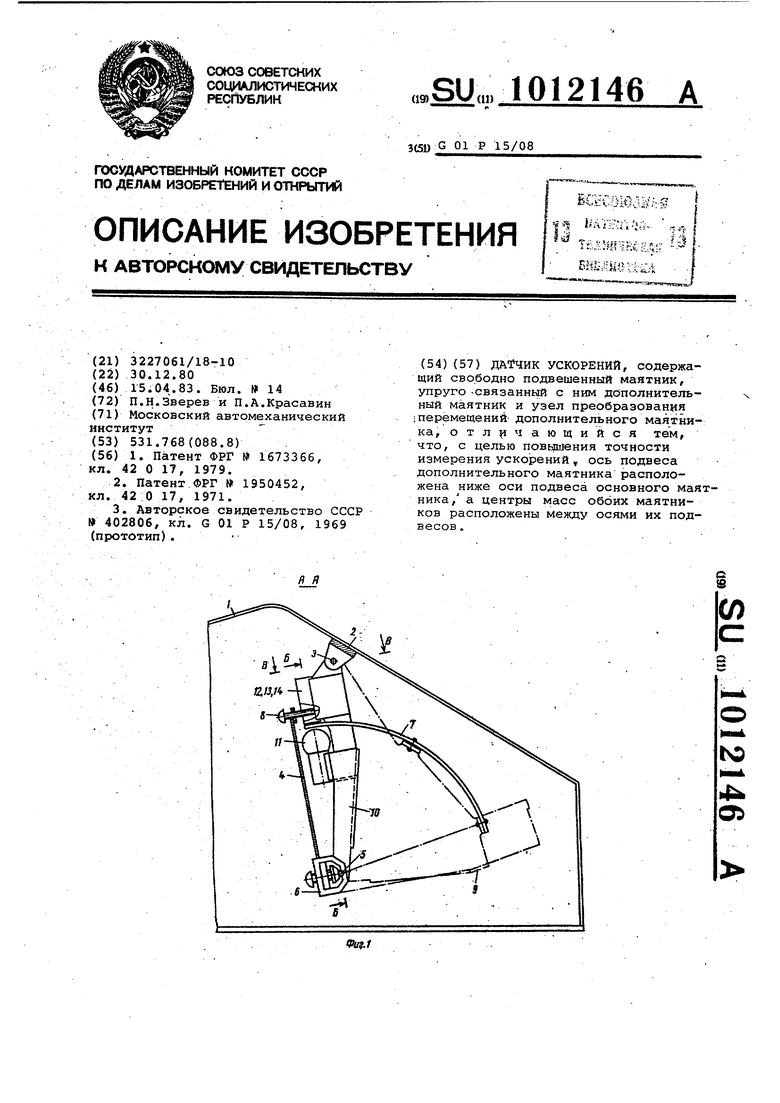
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Зажимное устройство | 1989 |
|
SU1673366A1 |
| Устройство для усиления микрофонного тока с применением самоиндукции | 1920 |
|
SU42A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Устройство для усиления микрофонного тока с применением самоиндукции | 1920 |
|
SU42A1 |
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
