(54) РЕЛЕЙНЫЙ РЕГУЛЯТОР
| название | год | авторы | номер документа |
|---|---|---|---|
| Релейный регулятор | 1980 |
|
SU900258A1 |
| Релейный регулятор | 1980 |
|
SU900257A1 |
| АДАПТИВНЫЙ РЕЛЕЙНЫЙ РЕГУЛЯТОР | 2013 |
|
RU2531865C1 |
| Релейный регулятор | 1981 |
|
SU1029139A1 |
| АДАПТИВНЫЙ РЕЛЕЙНЫЙ РЕГУЛЯТОР | 2011 |
|
RU2462744C1 |
| Релейный регулятор | 1979 |
|
SU857929A1 |
| Релейный регулятор | 1978 |
|
SU765782A1 |
| АДАПТИВНЫЙ РЕЛЕЙНЫЙ РЕГУЛЯТОР | 2008 |
|
RU2369893C1 |
| РЕГУЛЯТОР С РЕЛЕЙНОЙ ХАРАКТЕРИСТИКОЙ | 2005 |
|
RU2302029C1 |
| АДАПТИВНЫЙ РЕЛЕЙНЫЙ РЕГУЛЯТОР | 2008 |
|
RU2391691C1 |
I
Изобретение относится к регулирующим устройствам автоматики, оптимальным репейным системам управления,. к регуляторам замкнутых систем с кусочно-постоянным управлением, обеспечивающим изменения знака управляющего воздействия при состояниях системы, определяемых гиперповерхностями оптимального переключения.
Известен релейный оптимальный регулятор для объекта Y -то порядка, содержащий Y датчиков информащш и И преобразователей переменных состояния, координатный функциональный преобразователь и двухвходовой компаратор, причем выходы всех датчиков соединены со входами всех преобразователей переменных состояния, выходы которых первого напрямую, а последующие через функциональный преобразователь, связаны со входами компаратора 1.
Наиболее близким к предлагаемому является релейный оптимальный регулятор, содержащий последовательно соединенные датчик переменной состояния, устройство определения знака, устройство перемножения знаков
релейных сигналов и исполнительное устройство, выход датчика состояния связан через устройство выделения модуля с первым входом устройства запоминания экстремума, выход которого соединен со входами первых функциональных преобразователей, причем выход устройства определения знака через дифференцируклцее устройство связан со вторым входом устройства запоминания зкстремума 2.
10
Недостатком известного регулятора явллется наличие методической погреншости .при определении моментов переключения для объектов, передаточная функция которых выше второго порядка. При определении момеи15тов переключения используется точка зкстремума измеряемой переменной в пространстве состояний, для которой известны только величина зкстремума переменной состояния и скорость ее изменения, равная нулю.
20 Погрещность в таких системах вызвана отсутствием информации об ускорении и последующих производных в момент зкстрел ума измеряемой переменной состояния.
Цель изоброгения - повышение точности регулятора.
Поставленная цель достигается тем, что в регулятор дополнительно введе11ы селектор положительных сигналов, интегратор, вторые функциональные преобразователи и компара-, торы, выходы устройства выделения модуля и устройства запоминания экстремума связаны соответствующими входами первого
компаратора, выход которого через последовательно соединенные селектор положительных
сигналов и интегратор связан с первыми входами вторых функциональных преобразователей, второй вход которых соединен с выходом устройства запоминания экстремума, а выход подключен к первому входу соответствующего второго компаратора, второй вход каждого из которых подключен к выходу соответствующего первого функционального преобразователя, а третьи входы вторых компараторов подключены к выходу устройства выделения модуля, выходы вторых компараторов соединены с соответствующими входами устройства перемножения знаков, а выход дифференцирующего устройства соединен со входом обнуления интегратора.
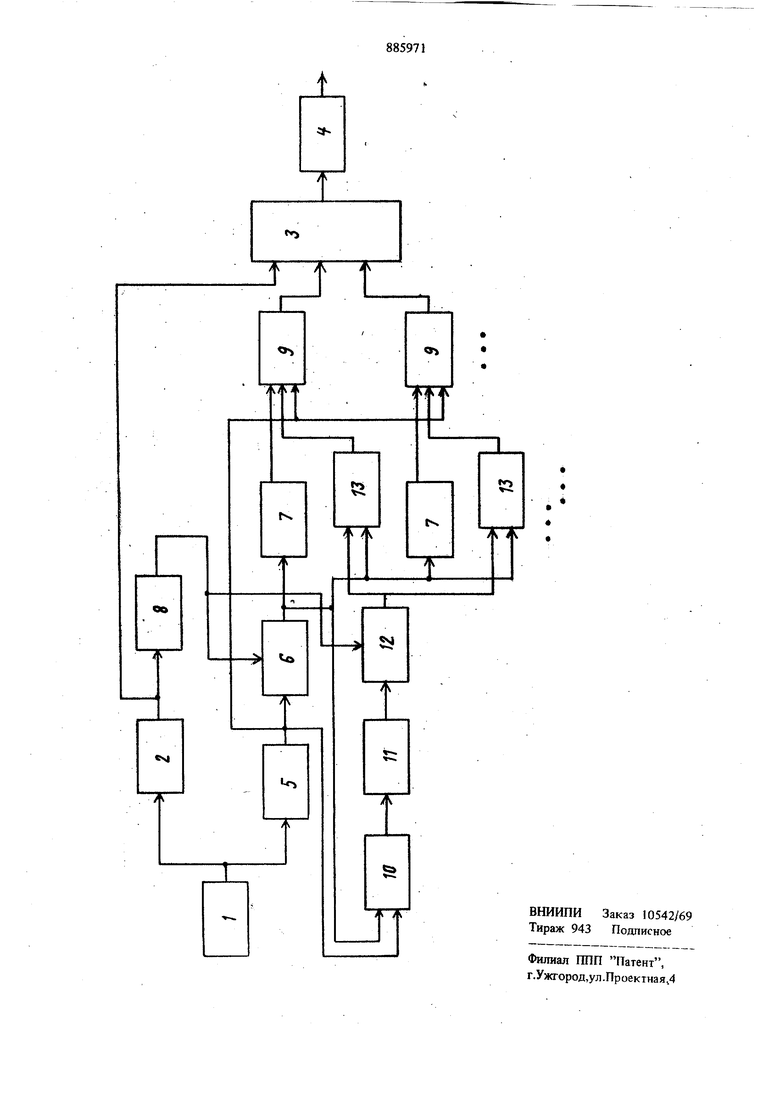
На чертеже изображена блок-схема регулятора.
Регулятор включает в себя датчик 1 переменной состояния, устройство 2 определения знака, устройство 3 перемножения знаков релейных сигналов, исполнительное устройство 4, устройство 5 выделения модуля, устройство 6 запоминания экстремума, первые функциональные преобразователи 7, дифференцирующее устройство 8, вторые компараторы 9, первый компаратор 10, селектор 11 положительных сигналов, интегратор 12, вторые функциональные преобразователи 13. Выход датчика 1 подключен к последовательно соедине 1ным устройствам определения знака 2, перемножения знаков 3 и исполнительному 4, а также последовательно соединеннъпм устройствам выделения модуля 5 и запоминания экстремума 6. Выход устройства 6 соединен с первым входом компаратора 10, входами всех функциональных преобразователей 7 и первыми входами всех функциональных преобразователей 13. Выход устройства 5 подключен ко второму входу компаратора 10 и третьим входам всех компараторов 9. Выход компаратора 10 соединен со вторыми входами всех вторых функциональных преобразователей 13 через последовательно соединенные селектор положительных сигналов И и интегратор 12. Выходы соответствующих функционального преобразователя 7 и функционального преобразователя 13 подключены к первым двум входам
соответствующего компаратора 9, а выход -i -го компаратора 9 подключен к -f +1 входу устройства перемножения 3. Выход устройства 2 определения знака через дифференцирующее устройство 8 подключен ко входам обнуления интегратора 12 и устройства 6 запоминания экстремума.
Устройство реализует следующий алгоритм и - sign хГ1 sign |х| TL; - f;
(t3,|xlmax)b где X - изменяемая переменная состояния
.или сигнал, поступающий с датчика 1; Xi - координата переключения при ускоре. НИИ и дальнейщих производных равным нулю, зависящая от |х| rnaxj t3 - время; отсчитываемое от момента
экстремума;
I lmax- экстремальное отклонение сигнала х, снимаемое -с устройства 6, реализующего зависимость
Гх 1,11/30. eig-vi X - sig х ;
Kaxi niax,. , t dSigviX/dt O.
Сигнал sign x снимается с устройства определения знака, а сигнал sign (1х|-Х| - f j х Чэ I Vsx) J- с соответствующих вторых компараторов. Сигнал 1э IB регуляторе формируется интегратором 12 в соответствии со следующей зависимостью;
dsig-hX Ф
Jsig nC/X/rMa7i )/)dt -и/лх.
0,dt
0, щ Vo.
Характеристика компаратора 10 - трехпозиционная с зоной нечувствительности, так как на него пост пают равные 5игналы|х| max
при sign X sign х или разныеfj max /( при sign X - sign х. Селектор 11 положительных сигналов (может быть реализован диодом) устраняет сбои в работе интегратора 12 при наличии помех на выходе устройства 5.
Функции XL закладываемые в функциональш к преобразователи 7 и fi(t3,(x|max) закладываемые в преобразователи 13 определяются по следующей методике.
Если экстремум не является гра1шчным,
т.е. в момент экстремума , то изображающая точка в момент экстремума в п-мерном пространства состояний находится в п-2 -мерной области, для которой определены X «max и О, а последующие производные
могут быть произвольными. В области фиксируемого .экстремума выделяют одномерное многообразие по параметру х и находят семейство оптимальных переходных процессов при фиксированном Одномерное многообрази начальных условий дает п-1 кривую совокугенести точек для каждого переключения в п-мер ном пространстве состояний. Дополняя п-мерное пространство состояний до п+1-мерного координатой времени, отсчитываемого от момента экстремума или от момента времени начала процесса в расчете, проектируют полученные кривые на плоскость х, t. Расчет повторяют для разных значений Хщах- Полученную функцию проекций кривой для i-ro переключения и для определенного значения Хтах разбивают на две части Xi и fi(t3, х max), где Xi - величина координаты переключения по координате X, при X О, а fKtg, )xlmax)- приращение -ЭТОЙ координаты при изменении х. Величины Xi для i-ro переключения объединяют в функциональную зависимость Xi f(Xfnax) И закладывают в i-ый функциональный преобразователь 7, а приращения fi(t3, Ixfrnax) в i-ый двухкоординатный функциональный преобразователь 13. Управляющее воздействие на первом интервале определяется устройством определения знака согласно выражения U -sign х при этом на второй и последующие входы устройства 3 подаются сигналы -Не компараторов 9. Момент экстремума определяется компаратором 10, сигнал с которого в этот момент становится +1 и интегрируется интегратором 12. Совокупность сигналов с двух i-ых преобразователей 7 и 13 определяет значение i-ой координаты переключения, равное сумме Xi+fi(t3 X. rnax)- Компараторы 9 переключаются последовательно в момеит равенства модуля измеряемого сигнала координате переключения по мере уменьшения измеряемого сигнала и реализуют с помощью устройства 3 п-1 переключение управляющего воздействия. При отработке рассогласования в момент х О схема приходит в исходное состояние за счет обнуления устройства запоминания экстремума 6 и интегратора 12. Регулятор исключает ощибки при определении моментов переключения для объектов, передаточная функция которых выше второго порядка, так как учитывает для определения моментов переключения значения переменных: измеряемую переменную и ее скорость, равную нулю, отнесенные к моменту не граничного экстремума и ускорение в момент экстремума за счет введения в регулятор времени. Использование времени, отсчитываемою от момента 714 экстремума, устраняет методическую погрещность в определении координаты переключения, равную величине fi(t3, |x/max)Повышение точности распшряет класс объектов, для которых предлагаемый регулятор дает квазиоптимальное рещение. Формула изобретения Релейный регулятор, содержащий последовательно соединенные датчик переменной состояния, устройство определения знака, устройство перемножения знаков релейных сигналов и исполнительное устройство, выход датчика состояния связан через устройство выделения модуля с первым входом устройства запоминания экстремума, вьтход которого соединен со входами первых функциональных преобразователей, а выход устройства определения знака через дифференцирующее устройство связан со вторым входом устройства запоминания экстремума, отличающийс я тем, что, с целью повыщения точности, он содержит селектор положительных снгналов, HHTerjDaTop, вторые функциональные преобразователи и компараторы, выходы устройства выделения модуля и устройства запоминания экстремума связаны с соответствующими входами первого компаратора, выход которого через последовательно соединенные селектор положительных сигналов ,и интегратор связан с первыми входами вторых функциональных, преобразователей, второй вход которых соединен с выходом устройства запоминания экстремума, а выход подключен к первому входу соответствующего второго компаратора, второй вход каждого из которых подключен к выходу соответствующего первого функционального преобразователя, а третьи входы вторых компараторов подключены к выходу устройства выделения модуля, выходы вторых компараторов соединены с соответствующими входами устройства перемножения знаков, а выход дифференцирующего устройства соединен со входом обнуления интегратора. Источники информации, принятые во внимание при экспертизе 1.Павлов А. А. Синтез релейных систем, оптимальных по быстродействию. Наука, 1966, с. 209-219. 2.Авторское свидетельство СССР № 283354, кл. G 05 В 17/00, 1974 (прототип).
