1
Изобретение относится к автоматическому регулированию и может быть использовано в системах автоматической оптимизации, осуществляющих поиск экстремума функции показателя качества
Известны релейные экстремальные ререгуляторы, содержащие устройство для определения знака приращений функции показателя качества, триггер знака, триггер реверсов и интегратор, Поиск экстремума в этих регуляторах осуществляется на основе информации о знаке прираи1ения функции показателя качества (ФПК), при этом в случае поиска максимума знак скорости изменения управляемой координаты меняется при получении информации о первом отрицательном приращении ФПК которое следует после положительного С.1 .20
Недостатком такого экстремального регулятора является возможность нарушения нормального процесса поиска или слежения за экстремумом (потеря устойчивости) вследствие появления выброса помехи отрицательного знака, превышающей зону, нечувствительности блока определения знака приращений, или вследствие дрейфа экстремума ФПК.
Наиболее близким по технической сущности к предложенному является релейный экстремальный регулятор, содержащий блок определения знака приращений, триггер знака, триггер реверсов, интегратор и блок дополнительного реверса 2.
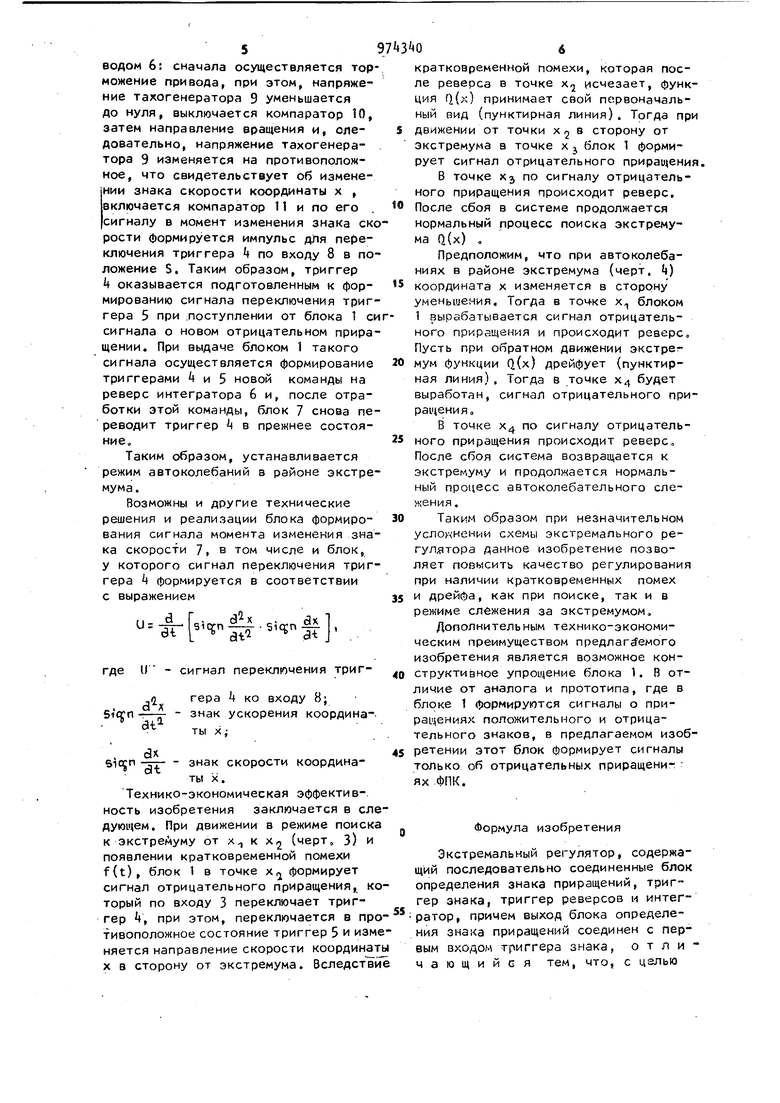
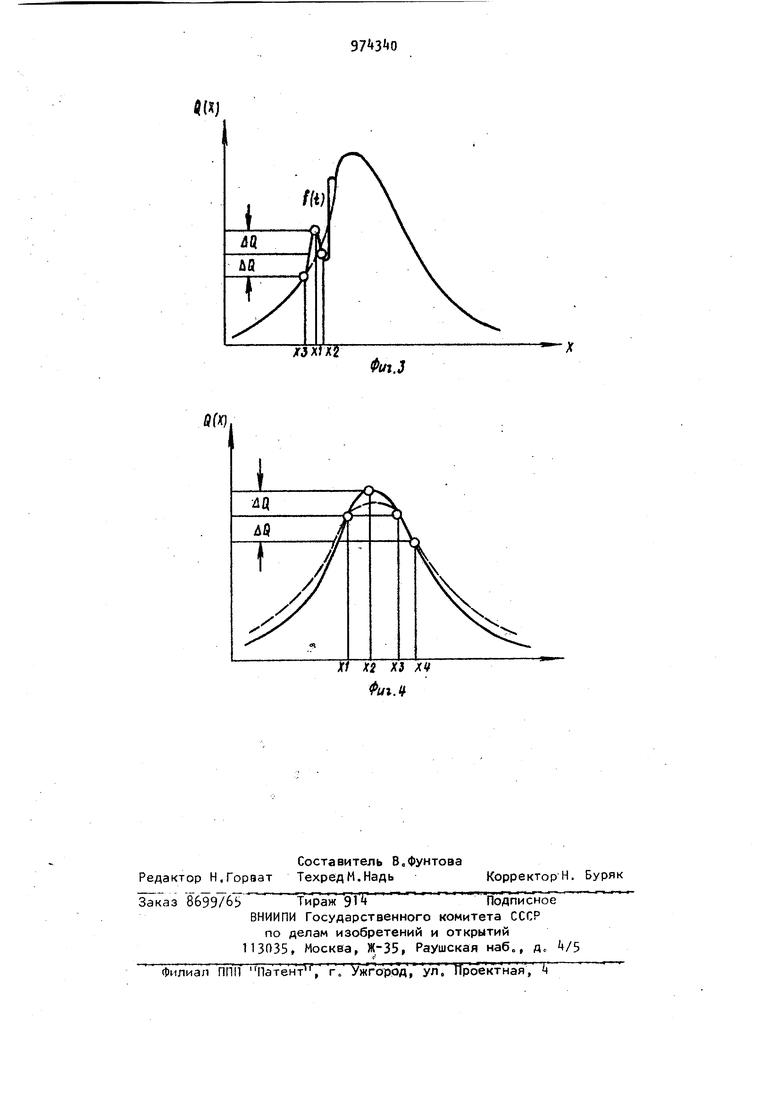
Поиск экстремума в этом регуляторе осуществляется также как и в аналоге, на основе информации о знаке приращения ФПК. В случае поиска максимума знак скорости управляемой координаты меняется при получении информации о первом отрицательном приращении ФПК, которое следует после положительного. При нарушении нормального хода процесса поиска и слеже|ния за экстремумом, т.е, при движении от экстремума, в функции заданного времени или числа отрицательных приращений блок дополнитб льного реверса осуществляет -принудительное переключение триггера реверсов. Однако для технической реализации блока дополнительного реверса необходимы априорные сведения о виде экстремальной характеристики, о динамических свойствах интегратора и объекта управления. Поэтому такое решение, обеспечивая, в принципе, при наличии этих сведений, устойчивость процессов поиска и слежения, в значительной степени увеличивает время поиска и амплитуду автоколебаний в районе экстремума, уменьшая при этом точность слежения. Целью изобретения является повышение качества регулирования путем улучшения устойчивости процессов по,иска и слежения за экстремумом. Поставленная цель достигается тем, что в экстремальный регулятор, содержащий последовательно соединенные блок одределения знака приращений, триггер знака, триггер реверсов и интегратор, причем выход блика определения знака приращений .соединен с первым входом триггера зн ка, введен блок формирования сигнала момента изменения знака скорости управляемой координаты, вход которого соединен с выходом интегратора, а выход - со вторым входом триггера знака. На фиг, 1 изображена структурная схема регулятора) на фиг. 2 - принципиальная схема возможной техничес кой реализации блока формирования си нала момента изменения знака скорости управляемой координаты; на фиг. принцип действия регулятора в переходном режиме при действии кратковременной помехи; на фиг„ 4 - принцип действия регулятора в режиме сле жения при дрейфе экстремальной харак теристики Экстремальный регулятор содержит блок 1 для определения знака приращений функции показателя качества (i(x) ; выход 2 его, на котором формируются сигналы о приращениях (l(x) отрицательного знака, присоединен ко входу 3 триггера знака k, выход которого соединен со входом счетного триггера реверсов 5 Прямой и инверсный выходы триггера 5 присоединены к соответствующим входам интегратора 6, Выход интегратора 6 подключен ко входу блока формирования сигнала момента изменения знака скорости управляемой .координаты 7, а выход блока 7 ко входу 8 триггера знака . Техническая реализация блока формирования сигнала момента изменения знака скорости управляемой координаты 7 для случая, когда в качестве блока 6 используется интегрирующий привод, может быть следующей, Выход датчика скорости - тахогенератора постоянного тока 9, присоединен к неинвертирующему входу компаратора 10 и к инвертирующему входу компаратора Il На другие входы компараторов 10 и 11 подано небольшое напряжение смещения, фиксирующее их выходы в состоянии логического нуля Выходы компараторов 10 и 11 соединены со входом логического элемента ИЛИ 12, имеющего прямой и инверсный выходы. Прямой выход элемента 12 соединен с одним из входов логического элемента И 13, к другому входу элемента 13 подключен конденсатор 14 и через резистоо 15 инвертирующий выход элемента 12. Таким образом, элементы 12-15 образуют устройство формирования импульса типа одновибратора, генерирующее на выходе элемента 13 импульс по переднему фронту уровня напряжения компараторов 10 или 11. Если при включении экстремального регулятора триггер 5 был в исходном состоянии, соответствующем положительному направлению скорости ВХОДНОЙ координаты х , то на выходе тахогенератора образуется напряжение положительного знака и компаратор 10 переключателя в состояние логической единицы На выходе логического элемента 13 при этом формируется импульс переключающий триггер k. Переключение триггера не вызывает переключение триггера 5. После прохода экстремума блок 1 вырабатывает сигнал отрицательного приращения, который по входу 3 переключает триггер k в состояние R, при этом, переключается и триггер 5, формируя команду на реверсирование скорости координаты X, которая отрабатывается интегрирующим приводом 6: сначала осуществляется тор можение привода, при этом, напряжение тахогенератора 9 уменьшается до нуля, выключается компаратор 10, затем направление вращения и, следовательно, напряжение тахогенератора 9 изменяется на противоположное, что свидетельствует об изменении знака скорости координаты х , включается компаратор 11 и по его сигналу в момент изменения знака ск рости формируется импульс дЛя переключения триггера Ц по входу 8 в по ложение S. Таким образом, триггер k оказывается подготовленным к формированию сигнала переключения триг гера 5 при .поступлении от блока 1 с сигнала о новом отрицательном прира щении. При выдаче блоком 1 такого сигнала осуществляется формирование триггерами и 5 новой команды на реверс интегратора 6 и, после отработки этой команды, блок 7 снова пе реводит триггер 4 в прежнее состояние„Таким образом, устанавливается режим автоколебаний в районе экстре мума . Возможны и другие технические решения и реализации блока формирования сигнала момента изменения зна ка скорости 7, в том числе и блок, у которого сигнал переключения три1- гера k формируется в соответствии с выражением si,n|li.5i,f . где и - сигнал переключения триггера k ко входу 8; 5,Vn АА знак ускорения координа dt j знак скорости координаты X . Технико-экономическая эффектив-. ность изобретения заключается в сл дующем. При движении в режиме поиск к экстремуму от х к х. (черт, З) и появлении кратковременной помехи f(t), блок 1 в точке x,j формирует сигнал отрицательного приращения, к торый по входу 3 переключает триггер k, при этом, переключается в пр тивоположное состояние триггер 5 и изм няется направление скорости координа X в сторону от экстремума. Вследств кратковременной помехи, которая после реверса в точке Xrj исчезает, функция Q(X) принимает свой первоначальный вид (пунктирная линия) . Тогда при движении от точки сторону от экстремума в точке х j блок 1 формирует сигнал отрицательного приращения, В точке Xj по сигналу отрицательного приращения происходит реверс. После сбоя в системе продолжается нормальный процесс поиска экстремума (1(х) , Предположим, что при автоколебаниях в районе экстремума (черт. Ц) координата х изменяется в сторону уменьшения. Тогда в точке х-, блоком 1 вырабатывается сигнал отрицательного приращения и происходит реверс. Пусть при обратном движении экстрег мум функции Q(X} дрейфует (пунктирная линия). Тогда в точке Х4 будет выработан, сигнал отрицательного приращения, В точке х по сигналу отрицательного приращения происходит реверс,, После сбоя система возвращается к экстремуму и продолжается нормальный процесс автоколебательного слежения. Таким образом при незначительном усло«нении схемы экстремального регулятора Данное изобретение позволяет повысить качество регулирования при наличии кратковременных помех и дрейфа, как при поиске, так и в режиме слежения за экстремумом. Дополнительным технико-экономическим преимуществом предлаггГемого изобретения является возможное конструктивное упрощение блока 1. В отличие от аналога и прототипа, где в блоке 1 формируются сигналы о приращениях положительного и отрицательного знаков, в предлагаемом изобретении этот блок формирует сигналы только об отрицательных приращени-. ях-ФПК. Формула изобретения Экстремальный регулятор, содержащий последовательно соединенные блок определения знака приращений, триггер знака, триггер реверсов и интегРатор, причем выход блока определения знака приращений соединен с первым входом триггера знака, отличающийся тем, что, с целью
повышения качества регулирования, он содержит блок формирования сигнала момента изменения знака скорости управляемой координаты, вход которого соединен с выходом интегратора, а выход - со вторым входом триггера знака.
Источники информации, принятые во внимание при экспертизе
1.Авторское свидетельство СССР № 470790, кл. G 05 В 13/02, 1975.
2,Моросанов И,С о Релейные экстремальные системы, М., Наука, 19б с. 56-59 (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| Экстремальный регулятор | 1976 |
|
SU634233A1 |
| Система экстремального регулирования квадрупольного масс-спектрометра | 1989 |
|
SU1795419A1 |
| Экстремальный регулятор с квазиоптимальным быстродействием | 1974 |
|
SU470790A1 |
| Система экстремального регулирования | 1981 |
|
SU1056132A1 |
| Способ управления в пьезополупроводниковых преобразователях и устройство для его осуществления | 1977 |
|
SU739500A1 |
| Релейный регулятор | 1980 |
|
SU885971A1 |
| Система управления | 1983 |
|
SU1168896A1 |
| Экстремальный регулятор режима обработки на металлорежущих станках | 1980 |
|
SU1015338A1 |
| Система экстремального регулирования | 1985 |
|
SU1290254A1 |
| Идентификатор многомерных объектов | 1984 |
|
SU1215086A1 |
XI Xi xs /v A/.
