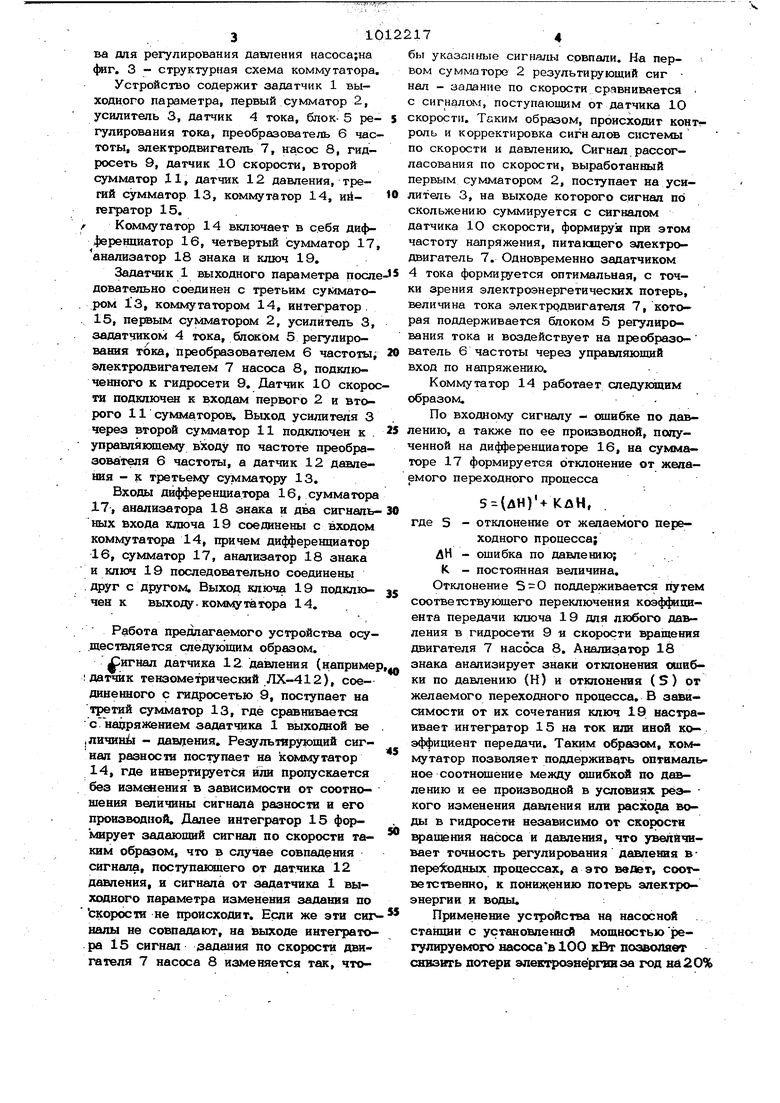
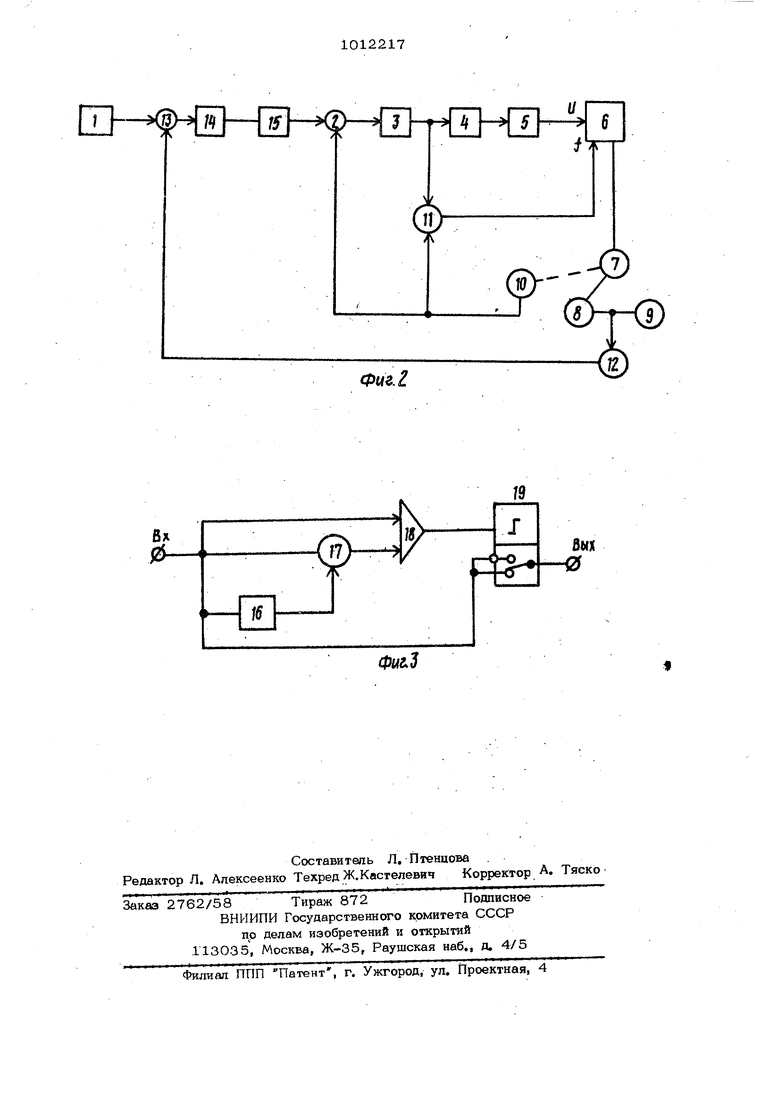
Изобретение относится к управлению .и регулированию электронасосными установками. Известно устройство для управления электронасосами, в котором для обеспечения гидравлических Характеристик и уменьшения потерь электроэнергии предлагается питать электронасос напряжением переменной частоты, при этом величина напряжения на зажимах статора зависит от частоты питапцего напряжения. Таким образом, регулирование давления осуществляется изменением частоты и на пряжения 1 3 Такое устройство не обеспечивает оптимального соотношения электрических параметров системы (напряжения, тока и частоты), поэтому давление в системе регулируется с низкой точностью, Неста&1льность давления ведет к увеличению потерь электроэнергии и воды. Наиболее близким к предлагаемому является устройство для регулирования асинхронных электроприводов, которое содержит задатчик выходного параметра ско .рости, последовательно соединенные. первый сумматор, усилитель, функциональный преобразователь, который преобразует функции задатчика тока, систему регулиро вания тока, состоящую из последовательно соединенных датчика тока, задатчика оптимального тока, сумматора, усилителя и системы управления выпрямителем. Пре образо1ватель частоты, подключенный к вы ходу системы регулирования тока, состоит из управляемого выпрямителя, дросселя, автономного инвертора, задающего генератора и системы управления инвертором. Двигатель соединен с насосом. Выход датчика скорости подключен л входам первого и второго сумматорбв, выход усилителя через второй сумматор подключен к- управляющему входу по частоте пре образователя частоты L2. Регулирование давления в этом устрой стве производится с очень низкой точностью. При одном и том же заданном сигнале задатчика выходной величины и скорости значение давления в гидросистеме отличается от расчетного в 1,5-2 раза. Использование указанного устройства приводит к большим потерям электроэнергии и воды вследствие нестабильности давления в гидросистеме. Кроме того, так как давление зависит от скорости вращения насоса нелинейно, характер его изменения при различном давлении и расходе воды разный. А именно, при малом давлении, а следовательно, и при малой скорости вращения двигателя насоса время стабилизации давления сравнительно велико (фиг. 1а), что вызывает дополнительные потери электроэнергии и воды. При больших значениях давления и скорости вращения двигателя насоса стабилизация давления характеризуется колебательностью (фиг. 16). Такая зависимость приводит к дополнительным потерям электроЬнергии и расходу воды, которые возникают из-за повьпиенного давления гидросистемы. Таким образом, точность регулирования стабилизированного давления воды при замедленном процессе установления давления (фиг. 1а), при давлении, когда действует колебательная зависимость (фиг. 16), а также при переходных процессах, T.q. при переходе от одного заданнрго значения давления к другому, снижается, что также приводит к по-, терям электроэнергии и воды. Целью изобретения является повышение точности и экономичности устройства. Поставленная цель достигается тем, что устройство для регулирования давления насоса, содержащее задатчик выхоДгноге параметра, последовательно соеШ1ненные первый сумматор, усилитель, задатчик тока, блок регулирования тока, преобразователь частоты и электродвигатель, кинематически соединенный с насосом, связанным с гидросетью, а также установленный на электродвигателе датчик скорости, связанный выходом с одним из ВХОДОВ1 первого сумматора и через второй сумматор, второй вход которого подключен к выходу усилителя, с вторым входом преобразователя частоты, содержит связанный с гидросетью датчик давления и подключенные к его выходу и соединенные последовательно третий сумматор, вторым входом подключенный к задатчику выходного параметра, коммутатор и интегратор выходом связанный с вторым входом первого сумматора. При этом коммутатор выполнен в виде последовательно соединенных дифференциатора, четвертого сумматора, анализатора знака и ключа, причем первый и второй сигнальные входы ключа, вход дифференциатора, вторые входы сумматора и анализатора знака подключены к входу сумматора, а выход ключа к выходу коммутатора. На фиг. 1 приведена временная диаграмма регулирования давления насоса; на 4иг.. 2 - структурная схема устрсЛства для регулирования давления насоса;на 4мг. 3 - структурная схема коммутатора. Устройство содержит задатчик 1 выходного параметра, первый сумматор 2, усилитель 3, датчик 4 тока, блок- 5 регулирования тока, преобразователь 6 частоты, электродвигатель 7, насос 8, гидросеть 9, датчик 10 скорости, второй сумматор 11, датчик 12 давления, трегий сумматор 13, коммутатор 14, ийгегратор 15. Коммутатор 14 включает в с.ебя дифференциатор 16, четвертый сумматор 17, анализатор 18 знака и ключ 19. Задатчик 1 выходного параметра nocne довательно соединен с третьим сумматором 13, коммутатором 14, интегратор. 15,первым сумматором 2, усилитель 3, задатчиком 4 тока, 5 регулирования тока, преобразователем 6 частоты электродвигателем 7 насоса 8, подключенного к гидросети 9. Датчик 1О скорос ти подключен к входам первого 2 и второго 11 сумматоров. Выход усилителя 3 через второй сумматор 11 подключен к . управляющему входу по частоте преобразователя 6 частоты, а датчик 12 давления - к третьему сумматору 13. Входы дифференциатора 16, сумматора 17, анализатора 18 знака и два сигналь ных входа ключа 19 соединены с входом коммутатора 14, причем дифференциатор 16,сумматор 17, анализатор 18 знака и ключ 19 последовательно соединены .друг с другом. Выход ключа 19 подключен к выхо; -комму та тора 14. Работа предлагаемого устройства осу.шеспвляется следующим образом. Сигнал датчика 12 давления (наприме : датчик тензометрический ЛХ-412), соединенного с гидросетью 9, поступает на третий сумматор 13, где сравнивается с. напряжением задатчика 1 выходной ве ,личин | - давления. Результирующий сигнал разности поступает на коммутатор 14, где инверти1 ется или пропускается без изменения в зависимости от соотношения величины сигнала разности и его производной. Далее интегратор 15 формирует задающий сигнал по скорости таким образом, что в случае совпадения сигнала, поступающего от датчика 12 давления, н сигнала от задатчика 1 выходного параметра изменения задания по скорости не происходит. Если же эти сиг налы не совпадают, на выходе интеграто ра 15 сигнал задания по скорости дви га теля 7 насоса 8 изменяется так, что10174 бы указанные сигналы совпали. На первом сумматоре 2 результирующий сиг нал - задание по скорости сравнивается . с сигналом, поступающим от датчика 10 скорости. Таким образом, происходит конт рояь и корректировка сигналов системы по скорости и давлению. Сигнал рассогласования по скорости, вьфаботанный первым сумматором 2, поступает на усилитель 3, на выходе которого сигнал по скольжению суммируется с сигналом датчика 1О скорости, формируя при этом частоту напряжения, питаюцего электродвигатель 7. Одновременно задатчиком тока формируется оптимальная, с точи зрения электроэнергетических потерь, еличина тока электродвигателя 7, котоая поддерживается блоком 5 регулироания тока и воздействует на преобразоатель 6 частоты через управляющий ход по напряжению. Коммутатор 14 работает следукяцим бразом. По входному сигналу - ощибке по давению, а также по ее производной, полуенной на дифференциаторе 16, на суммаоре 17 формируется отклонение от желамого переходного процесса )+КДН, , где 5 - отклонение от желаемого переходного процесса; йН - ощибка по давлению; К - постоянная величина. Отклонение 5 0 поддерживается путем соответствующего переключения коэффициента передачи ключа 19 для любого давления в гидросети 9 и скорости вращения двигателя 7 насоса 8. Анализатор 18 знака анализирует знаки отклонения ошибки по давлению (Н) и отклонения { S ) от желаемого переходного процесса. В зависимости от их сочетания ключ 19 настраивает интегратор 15 на ток или иной ко-. эффициент передачи. Таким образам, коммутатор позволяет поддерживать оптимальное соотнсяыение между ошибкой по давлению и ее производной в условиях рёэ- кого изменения давления или расход воды в гидросети независимо от скорости вращения насоса и давления, что увеличивает точность регулирования давления впереходных процессах, а это ведет, соогветсгвенно, к пония ению потерь электроэнергии и воды. Применение устройства н насосной станции с установленнсй мощностью регулируемого насосав 1ОО кВт позволяет снизить потерн элекпроэнерх ввза год на 20% Фиг. I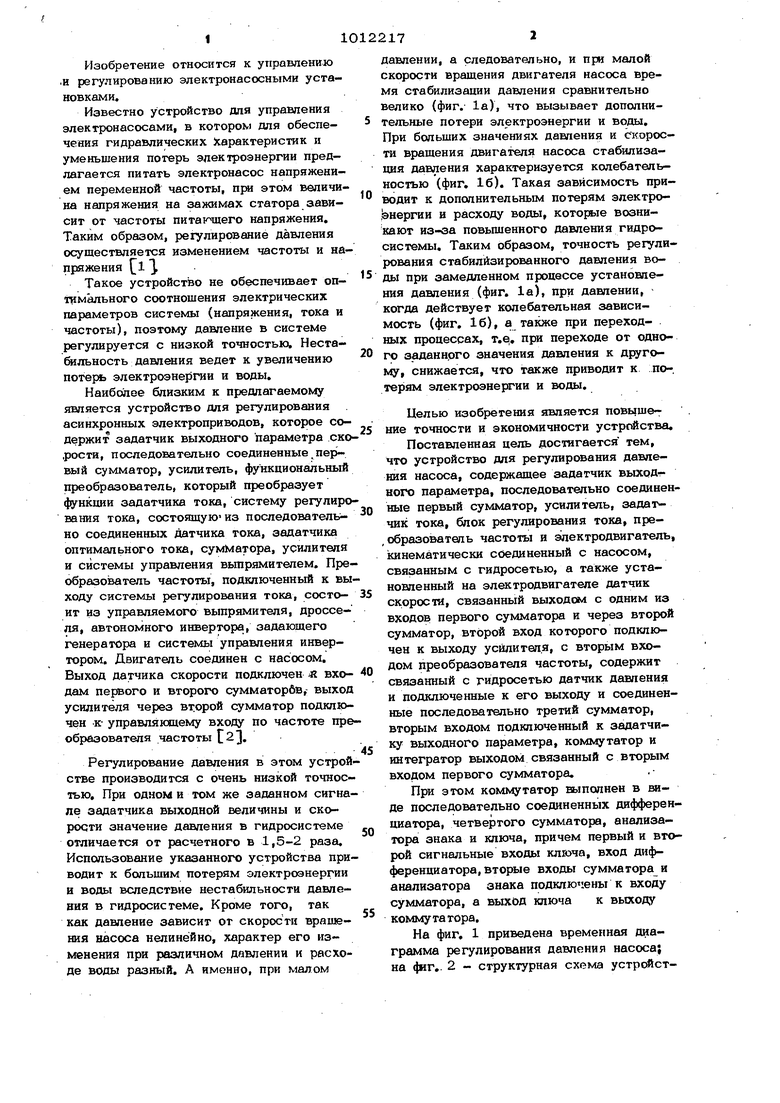
| название | год | авторы | номер документа |
|---|---|---|---|
| Электропривод постоянного тока | 1990 |
|
SU1767680A1 |
| Устройство для регулирования скорости лентопротяжного механизма | 1988 |
|
SU1501002A1 |
| ЧАСТОТНО-РЕГУЛИРУЕМЫЙ АСИНХРОННЫЙ ЭЛЕКТРОПРИВОД | 2008 |
|
RU2401502C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ТЕХНИЧЕСКОГО СОСТОЯНИЯ ДВИГАТЕЛЕЙ ВНУТРЕННЕГО СГОРАНИЯ И ЭКСПЕРТНАЯ СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1999 |
|
RU2175120C2 |
| Способ управления электродвигателем скребкового конвейера и электропривод для его осуществления | 1988 |
|
SU1647839A1 |
| Самонастраивающаяся система регулирования скорости | 1987 |
|
SU1462243A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ТЕХНИЧЕСКОГО СОСТОЯНИЯ ДВИГАТЕЛЯ ВНУТРЕННЕГО СГОРАНИЯ И ЭКСПЕРТНАЯ СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2005 |
|
RU2293962C1 |
| Реверсивный вентильный электродвигатель | 1987 |
|
SU1431015A1 |
| Измеритель сопротивления кондуктометрического датчика | 1980 |
|
SU898342A1 |
| Стенд для испытания электрических исполнительных механизмов | 1987 |
|
SU1499141A1 |
1. УСЛРОЙСТВО ДЛЯ РЕГУЛИРОВАНИЯ ДАВЛЕНИЯ НАСОСА, содержащее задатчик выходного параметра, последовательно соединенные первый сумматор, усилитель, задатчик тока, блок регулирования тока, преобразователь частоты и электродвигатель, кинематически .соединенный с насосом, связанным с гидросет ю, а также установленный на электродвигателе датчик скоросго, выходом связанный с одним из входов первого сумматора н через второй сумматор, второй вход которого подключен к выходу усилителя, с вторым входом преобразователя частоты, о тличающееся тем, что, с цеаью повышения точности и экономичности устройства, оно содержит связанный с гидросетью датчик давления и подключенные к его выходу н соединенные ; последовательно третий сумматор, вторым входом подключенный к задатчику выходного параметра, коммутатор и вн1«гратор, выходом связанный со BTOjajM входом первого сумматора, S 2. Устройство по п. 1, о т л н ч & ю щ е е с я тем, что коммутатор вы полней в виде последовательно соединенных дифференциатора, четвертого сумматора, анализатора знака и ключа, цричем первый и второй сигнальные входы кл10ча, вход дифферешшатора, вторые входы сумматора и анализатора знака подкдючены к входу коммутатора, а выход ключа - к выходу коммутатора. н 0Ut.1
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Регулятор давления жидкости для насосной станции | 1974 |
|
SU526863A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Дадковский М | |||
| X | |||
| н др | |||
| Принципы построения систем регулирования асинхронных электроприводов с инвёрторными преобразоватеяями частоты | |||
| - Электротехническая промышленность , Эпек- | |||
| троправод, 1974, № 5 | |||
