Изобретение относится к системам автоматического управления, предназначенным для управления автоматизированными электроприводами постоянного тока, и может быть использовано в системах подач станков с устройством числового программного управления
Целью изобретения является повышение динамической точности системы при малых сигналах задания. - . На чертеже приведена функциональная схема самонастраивающейся системы регулирования скорости.
Самонастраивающаяся система содержит сз мматор 1, дифферен1шатор 2, усилитель 3 с регулируемым уоилением выпрямитель 4, задатчик 5 скорости, сзгмматор 6, регулирующий блок 7, объект 8 регулирования, модель 9 системы, делитель 10 напряжения, вьшря митель 11, ключ 12, компараторы 13, 14, элемент ИСКЛОЧА10ЩЕЕ ИЛИ 15.
Регулирующий блок 7 содержит регулятор 16 скорости, сумматор 17, регулятор 18 тока, тиристорный преобразователь 19 и датчик 20 тока с шунтом 21.
Объект 8 регулирования содержит двигатель 22 и датчик 23 скорости.
Самонастраивающаяся система регулирования скорости работает следующим образом.
Самонастраивающаяся система регулирования скор ости с одержит блок само настройки, который включает в себя модель 9 системы, сзлиматор 1, выпря мители 4, 11, делитель 10 напряжения компараторы 13, 14, элемент ИСКЛЮЧАЮЩЕЕ ИЛИ 15 и последовательно вклю- :Ченные дифференциатор 2, усилитель 3 с регулируемь М усилением и ключ 12. Вход модели 9 под1шючен к выходу за- датчика 5 скорости и моделирует пе™ реходную характеристику R системе ре гулирования скорости (скорость вращения электродвигателя) , Опре,целение ошибки регулирования осуществляется на сумматоре 1,:на входы которого поступают сигналы с выхода модели 9 системы и с выхода датчика 23 скорости. Опшбка регулирования о выходе сумматора 1 подается на вьшрямитель 4, предназначенный Для получения модуля ошибки регулирования, а также на вход компаратора 13, предназ на- ченного для определения знака ошибки. Выходной сигнал выпрямителя 4 поступает на вход делимого делителя
0
5
0
5
з 0 5 -
0
10 напряжения, на вход делителя которого поступает сигнал с выхода выпрямителя 11, входом подключенного к выходу модели 9 системы и осуществляющего получение модуля сигнала выходного сигнала модели 9. Делитель 10 напряжения осуществляет деление сигналов модуля ошибки регулирования (сигнал Q выхода вьшрямителя 4) на модуль выходного сигнала модели 9 системы. Выходной сигнал делителя напряжения представляет собой относительную величину ошибки регулирования. Выходной сигнал делителя 10 напряжения поступает на управляющий вход усилителя 3 с регулируемым усилением. Регулирование величины производной, получаемой дифференциато-. ром 2, ocyT4ecfвляется на усилителе 3 с регулируемым усилием в функции относительной ошибки регулирования по линейному закону. Выходной сигнал усилителя 3 с регулируемым усилением через ключ 12 подается на вход сумматора 17. Причем в зависимости от выходного сигнала элемента ИСКЛЮЧАЮЩЕЕ ИШ 15 ключ 12 может быть замкнут или разомкнут и сигнал по производной может или не может поступать на вход регулятора тока как положительная параллельная связь.
При несоответствии заданной динамической характеристики системы (сигнал на выходе модели 9 системы) и динамической характеристики системы (сигнал на выходе датчика 23 скорости вращения) появляется ошибка регулирования на выходе сумматора 1. Причем в зависимости от знаков ошибки .регулирования (сигнал на выходе су 5матора 1) и выходного сигнала эталонной модели 9 пpQиcxoдят переключения ключа 12. Компаратор 14 определяет знак эталонного задающего сигнала. Когда эталонный сигнал положительный, на выходе компаратора сигнал +1 , а если задающий сигнал отрицательный, на выходе сигнал О. Компаратор 13 определяет знак ошибки по скорости вращения, причем, если ошибка по скорости положительная, то на выходе компаратора сигнал +1, а если ошибка по скорости отрицатель ная, то на выходе компаратора сигнал О.
Если в динамических режимах в электроприводе действительная скорость вращения меньше чем эталонная скорость вращения (происходит отставание действительной скорости вращения по сравнению с эталонной), то знаки эталонной скорости вращения (на выходе компаратора 13) совпадают При этом для улучшения динамических характеристик вводится производная по задающему сигналу, В этом случае сигналы на вькоде компаратора 13 и 1А - 1 или О, на выходе элемента ИСКЛОЧАМЩЕ ИЛИ сигнал 1 и ключ 12 замкнут и сигнал по производной от задающего сигнала поступает на вход сумматора 17.
Если в динамических режимах в самонастраивающейся системе регулирования скорости действительная скорость вращения больше, чем эталонная скорость вращения (происходит опережение действительной скорости по сравнению с эталонной)., то знаки эталонной скорости вращения (на выпри малых заданиях на скорость вращения ,
Самонастраивающаяся система ре-
.. гулирования скорости позволяет улуч- 5
шить динамические характеристики по
управляющему воздействию, а именно повысить динамическую точность системы при малых ампш{тудах задающего
10 сигнала за счет введения производной по заданию на вход регулятора тока в функции относительньгх ощибок регулирования и в функции знаков ошибки регулирования и эталонного задающего
15 сигнала.
Формула изобретения
Самонастраивающаяся система регулирования . скорости, содержащая
20 задатчик скорости, выход которого соединен с входом дифференциатора и с входом модели системы, выход которой подключен к первому входу первого сумматора, второй вход которого ходе компаратора 14) и ощибки по ско- 25 соединен с первым входом второго сум- рости вращения (на выходе компарато-матера и с выходом объекта регулиро62243
при малых заданиях на скорость вращения ,
Самонастраивающаяся система ре-
.. гулирования скорости позволяет улуч- 5
шить динамические характеристики по
управляющему воздействию, а именно повысить динамическую точность системы при малых ампш{тудах задающего
10 сигнала за счет введения производной по заданию на вход регулятора тока в функции относительньгх ощибок регулирования и в функции знаков ошибки регулирования и эталонного задающего
15 сигнала.
Формула изобретения
Самонастраивающаяся система регулирования . скорости, содержащая

| название | год | авторы | номер документа |
|---|---|---|---|
| Самонастраивающаяся система регулирования скорости | 1981 |
|
SU1007083A1 |
| Самонастраивающийся регулятор | 1981 |
|
SU960731A1 |
| ЭЛЕКТРОПРИВОД ПОСТОЯННОГО ТОКА | 1990 |
|
RU2011286C1 |
| Самонастраивающаяся система регулирования скорости | 1984 |
|
SU1180844A2 |
| Самонастраивающаяся система управления | 1985 |
|
SU1249478A1 |
| Электропривод постоянного тока | 1990 |
|
SU1767680A1 |
| Система автоматического регулирования | 1978 |
|
SU752221A1 |
| Устройство улучшения коммутации коллекторных электрических машин постоянного тока | 1984 |
|
SU1192047A1 |
| Адаптивная система управления для объектов с изменяющимся запаздыванием | 1986 |
|
SU1383292A1 |
| Способ адаптивного управления исполнительным механизмом | 2023 |
|
RU2821298C1 |
Изобретение относится к системам автоматического управления, предназначенным для управления автоматизированными электроприводами постоянного тока, и может быть использовано ков с устройством числового программного управления. Целью изобретения является повышение динамической точности системы при малых сигналах задания. Самонастраивающаяся система регулирования скорости содержит сумматоры 1 и 6, дифференциатор 2, усилитель 3 с регулируемым усилением, выпрямители 4 и 11, задатчик 5 скорости, регулирующий блок 7, объект 8 регулирования, Модель 9 системы, делитель 10 напряжения, компараторы 13 и 14 и элемент ИСКЛЮЧАЩЕЕ ИЛИ. Улз Ч шение динамических характеристик по управляющему воздействию в самонастраивающейся системе осуществляет- ся за счет введения производной по задающему сигналу на вход репулир:5то- щего устройства в функции относительной величины динамической ошибки и в функции знаков ошибки и эталонного задающего сигнала 1 ил.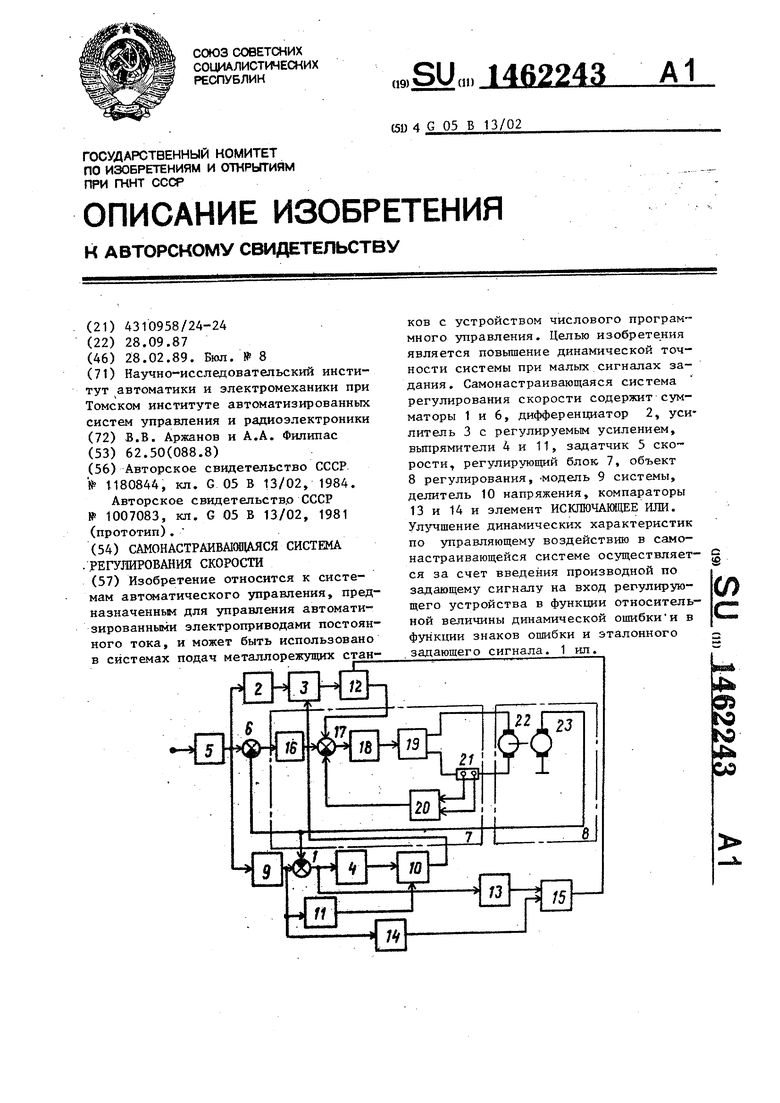
ра 13) не совпадают. В этом режиме сигналы на входах элемента ИСКЛЮЧАЮЩЕЕ ИЛИ - 15 имеют разные знаки и сигнал на выходе элемента t5 имеет О. При этом ключ 12 разомкнут и сигнал по производной от задающего сигнала на вход сумматора 17 не поступает. При малых заданиях на скорость .вращения ощибка на выходе первого сумматора 1 мала по величине и выходвания, вход которого соединен с выходом регулирующего блока, подключенного первым входом к выходу вто- 30 рого сумматора, второй вход которого соединен с входом дифференциатора, выход которого подключен к информационному входу усилителя с регулируемым усилением, прячем выход первого c; iмaтopa соединен с входом первого
35
выпрямителя.
отличающаяся
ной сигнал выпрямителя 4 мал. В электроприводе прототипа коэффи1щент усиления усилителя с регулируемым усилением был близок к нулю и произ- 40 водная по заданию на вход регулирующего блока не поступала бы и динамические характеристики не улучшились. В системе в этом-режиме определяется относительная величина ошибки на д вход которого соединен с выходом де- делителе 10 напряжения, которая будет лителя напряжения, подключенного вхотем, что, с целью повышения динамической точности системы при малых системах задания, в нее введены делитель напряжения, второй выпрямитель, два компаратора, элемент ИСКЛЮЧАЮЩЕЕ ИЛИ и ключ, информационный вход которого соединен с выходом усилителя с регулируемым усилением, управляющий
иметь в этом режиме значительную ве- |личину, и коэффициент усиления усилителя 3 с регулируемым усилением будет большим, а следовательно, сигнал на выходе усилителя 3 будет значительным. Это приводит к повышению чувствительности контура самонастройки на малых скоростях вращения, и происходит форсировка динамических процессов в системе, что приведет к улучшению динамических характеристик по управляющему возчействию, а именно к расширению полосы пропускания частот
вания, вход которого соединен с выходом регулирующего блока, подключенного первым входом к выходу вто- 30 рого сумматора, второй вход которого соединен с входом дифференциатора, выход которого подключен к информационному входу усилителя с регулируемым усилением, прячем выход первого c; iмaтopa соединен с входом первого
35
выпрямителя.
отличающаяс
вход которого соединен с выходом де- лителя напряжения, подключенного вхотем, что, с целью повышения динамической точности системы при малых системах задания, в нее введены делитель напряжения, второй выпрямитель, два компаратора, элемент ИСКЛЮЧАЮЩЕЕ ИЛИ и ключ, информационный вход которого соединен с выходом усилителя с регулируемым усилением, управляющий
0
5
дом делимого к выходу первого выпрямителя, подключенного входом к входу первого компаратора, выход которого соединен с первым входом элемента ИСКЛЮЧАЮЩЕЕ ИЛИ, выход которого подключен к управляющему входу ключа, а второй вход - к выходу второго компаратора, вход которого соединен с выходом модели системы и с входом второго вьшрямителя, подключенного выходом к входу делителя напряжения, выход ключа соединен с вторым входом регулирующего блока.
| Самонастраивающаяся система регулирования скорости | 1984 |
|
SU1180844A2 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Самонастраивающаяся система регулирования скорости | 1981 |
|
SU1007083A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
