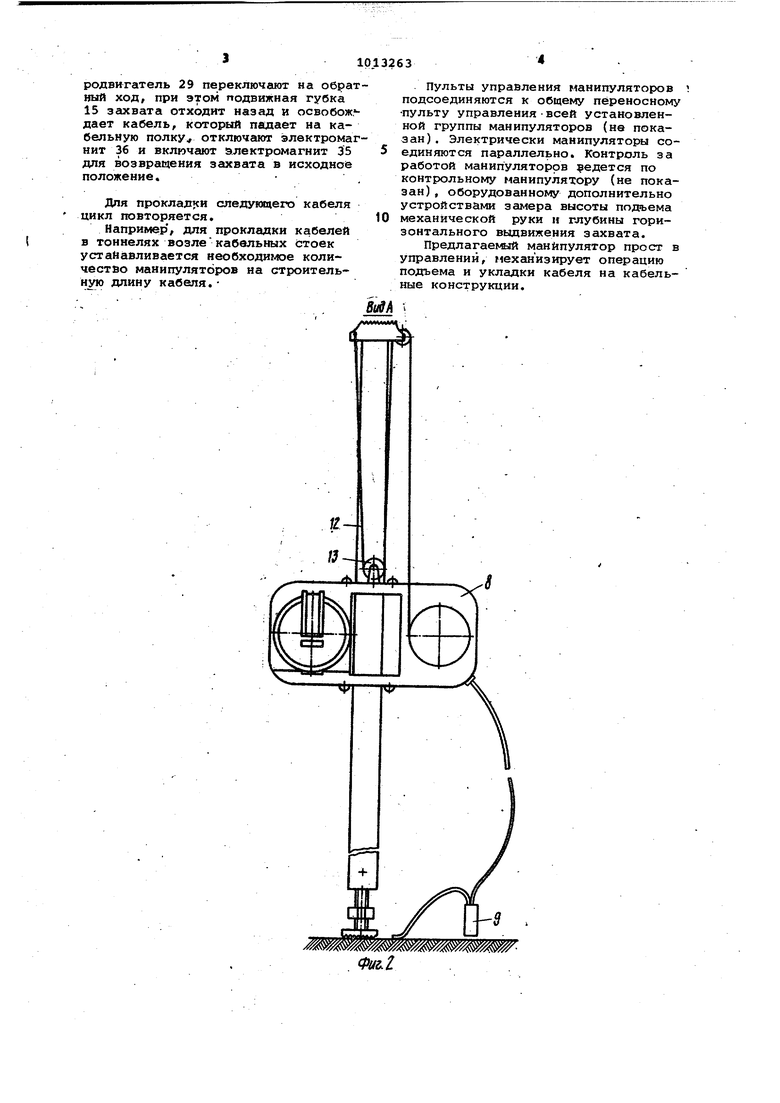
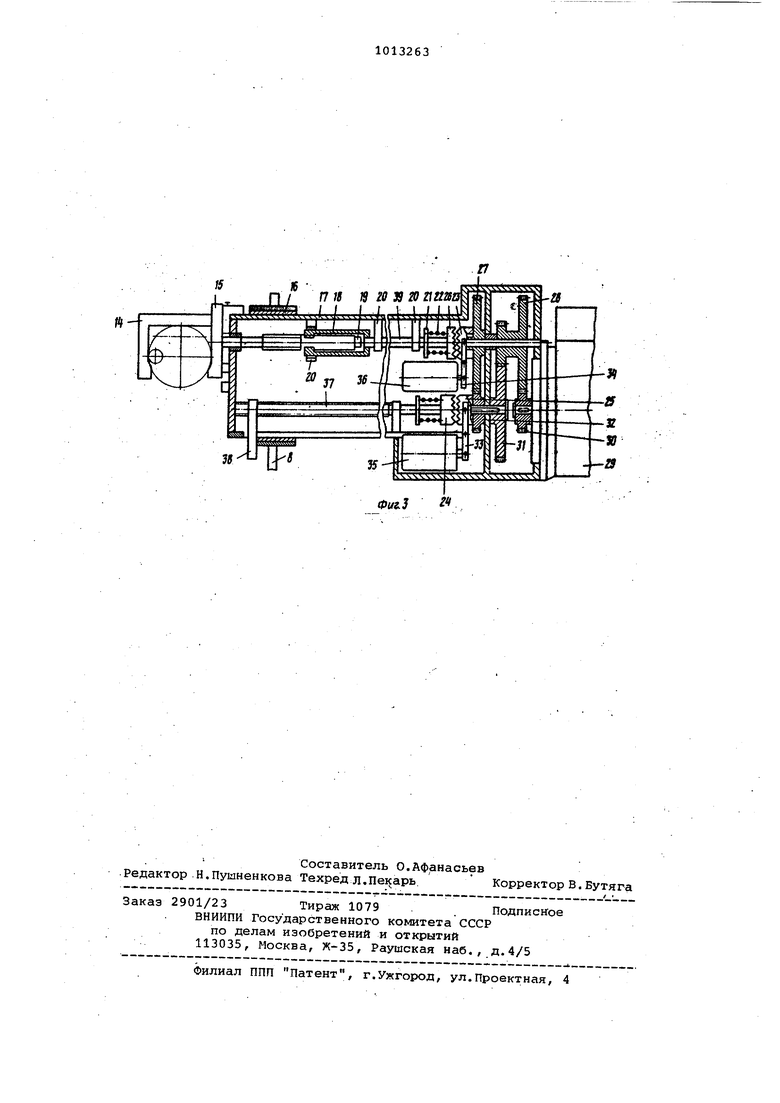
Изобретение относится к станко- строению, в частности к подъемнотранспортным средствам, используемым например, при прокладке силовых и контрольных кабелей в закрытых помещениях (тоннели, метро, промышленные цеха и галереи), а также для подъема мелких конструкций. Известен манипулятор, содержащий корпус, опорную штангу, механическую руку с приводом и механизмом вертикального перемещения, кинематически связанную с. опорной штангой, имеющую захват с механизмом его горизонтального перемещения, а также пульт управления Cl1« Недостатками известного устройства являются сложность конструкции, большой вес и размеры. Целью изобретения является упроще ние конструкции манипулятора. , Цель достигается, тем, что мьнипулятор, содержащий корпус, опорную штангу, механическую руку с приводом и механизмом вертикального перемещения, кинематически связанную с опорной штангой, имеющую захват с механи мом его горизонтального перемещения, а также пульт управления, снабжен балкой, установленной на одном конце опорной штанги, а механизм вертикаль ного перемещения механической руки выполнен в виде трособлочной системы блоки которой и один конец троса ус. тановлены на балке, а второй конец троса - .на механической руке, причем привод механической руки связан со вторым концом троса. На фиг.1 показан манипулятор, общий вид; На фиг.2 - вид А на фиг.1 на фиг.3 - конструкция механической руки манипулятора. Манипулятор содержит опорную штан ГУ 1 {фиг.1) и соединенную с ней сме ную балку 2, выполненные из гнутых .швеллеров.Сменная балка 2 может иметь разную высоту. С балкой 2 соединён верхний упор 3, на котором жестко крепится блок4. В нижней части штанги 1 расположен подпятник 5 и распорная гайка 6, а также выполнены отверстия 7 для установки кабельных роликов. По опорной штанге 1 переме-г щается механическая рука, включающая выдвижной захват с механизмом его горизонталЕного перемещения, заключенные в корпусе 8, .а также механизм вертикального перемещения руки. Оба механизма управляются с пульта 9, Механизм вертикального перемещения . включает мотор-редуктор 10 и барабан 11 троса 12, переброшенного через блоки 4 и 13 (фиг.2). Выдвижной за-: хват включает съемную 14 и поворотную 15 губки захвату (фиг.З), подшипник 16, скользящий по каркасу 17, а также фасонную гайку 18 и винт 19 поворотной губки 15, подшипники 20, закрепленные на каркасе 17, упор 21 и пружину 22, зубчатые полумуфты 23, 24, -25 и 26, шестерни 27, блок 28 шестерен, электродвигатель 29, ПРИВОДЯЩИЙ во вращение последовательно шестерни 30, 28, 31, 32 и 27, рычаги 33 и 34 переключения полумуфт и электромагниты 35 и 36, передающие поочередно вращательное движение вицту 37 горизонтального.перемещения механической руки, работающему совместно с гайкой 38, жестко закрепленной на корпусе 8 или винту .39 с гайкой 18, приводящему в горизонтальное перемещение винт 19 с губкой 15 с целью зажатия груза. Манипулятор работает следукяцим образом. Внизу на штанге в отверстиях 7 крепится кабельный ролик, по которому обычными методами протягивается кабель. Включается мотор-редуктор 10, опускается и устанавливается механическая рука в зависании над кабелем так, чтобы губки захвата 14 и 15 расположились по обе стороны кабеля. Для этого включают (фиг.3).электромагнит 35, который передвигает полумуфту 25 через рычаг 33 до зацепления С полумуфтой 24, после чего включается электродвигатель 29. Вращение передается на винт 37, )аращающийся в гайке 38, которая жестко скреплена с корпусом 8, вследствие чего каркас 17 с раздвинутыми губками 14 и 15 захвата передвигается горизонтально до тех пор, пока кабель не расположит.ся между губками и ниже их . Двигатель 29 и электромагнит 35 включают с пульт а 9. Включив мотор-редуктор 10, опускают захват ниже до тех пор, пока кабель не войдет в полость между губками 14 и 15. Выключают мотор-редуктор 10. Вклю.чают электромагнит 36, при этом полумуфта.23 сцепляется с полумуфтой 26 и при включении электродвигателя 29 винт 39 вращает гайку 18. При вращении гайки 18 передвигается винт 19 с губкой 15 и прижимает кабель к губке 14. Включают мотор-редуктор 10, при этом на барабан 11 наматывается трос 12, механическая рука поднимается с зажатым кабелем на-уровень между кабельной полкой, на которую необходимо уложить кабель, и вышестоящей полкой, затем мотор-редуктор 10 отключают. Для подачи кабеля вглубь кабельной полки включают электромагнит 35 и электродвигателЬ 29, вследствие чего каркас 17 захвата подается вперед на нужное расстояние по горизонтали. Отключают электромагнит 35 и включают электромагнит 36, а электродвигатель 29 переключают на обратный ход, при этом подвижная губка 15 захвата отходит назад и освобожг дает кабель, который падает на кабельную полку, отключают электромагнит 36 и включают электромагнит 35 для возвращения захвата в исходное положение. .
Для проклад си следующего кабеля цикл повторяется.
Например , для прокладки кабелей в тоннелях возлекабельных стоек устайавливается необходшлэе количество манипуляторов на строительную длину кабеля.
Пульты управления манипуляторов подсоединяются к общему переносному пульту управления всей установленной группы манипуляторов (не показан). Электрически манипуляторы соединяются параллельно. Контроль за работой манипуляторов едется по контрольному манипулятору (не показан) , оборудованному дополнительно устройствами замера высоты подъема механической руки и глубины горизонтального выдвижения захвата.
Предлагаемый манипулятор прост в управлении, механизирует операцию подъема и укладки кабеля на кабельные конструкции.
П
Фиг.З 1
| название | год | авторы | номер документа |
|---|---|---|---|
| Манипулятор | 1979 |
|
SU814721A1 |
| СПОСОБ ИЗГОТОВЛЕНИЯ МЕТАЛЛОДЕРЕВЯННЫХ БАЛОК ИЗ МЕТАЛЛИЧЕСКОГО СЕРДЕЧНИКА И ДВУХ ДЕРЕВЯННЫХ ОБКЛАДОК И ПРОИЗВОДСТВЕННЫЙ МОДУЛЬ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2006 |
|
RU2354790C2 |
| Машина самоходная гусеничная малогабаритная для подъема и установки бордюрного камня. | 2022 |
|
RU2785102C1 |
| Разгрузочно-погрузочный манипулятор-тренажёр с параллельным тросовым приводом | 2023 |
|
RU2835999C1 |
| Устройство для монтажа и демонтажа колес автомобилей | 1983 |
|
SU1232530A1 |
| УСТРОЙСТВО ДЛЯ ТРЕНИРОВКИ СПОРТСМЕНОВ | 2014 |
|
RU2556540C1 |
| ПОДЪЕМНОЕ УСТРОЙСТВО | 2024 |
|
RU2835700C1 |
| Захват манипулятора | 1984 |
|
SU1333573A1 |
| СПОСОБ ПРЕОБРАЗОВАНИЯ КИНЕТИЧЕСКОЙ ЭНЕРГИИ ВЕТРА НА ЛЕТАЮЩЕЙ ВЕТРОЭНЕРГЕТИЧЕСКОЙ УСТАНОВКЕ | 2018 |
|
RU2697075C1 |
| РОБОТИЗИРОВАННЫЙ КОМПЛЕКС ДЛЯ СБОРА, РАЗДЕЛЕНИЯ, НАКОПЛЕНИЯ И УТИЛИЗАЦИИ ДОННЫХ ЗАГРЯЗНЕНИЙ | 2023 |
|
RU2815037C1 |
. МАНИПУЛЯТОР, содержащий корпус, опорную штангу, механическую руку с приводом и механизмом вертикального перемещения, кинематически ;.,..Х. V LiTjrOсвязанную с опорной штангой, нмеюиук захват с механизмом его горизонтального перемещения , а также пульт уп- равления, о т л и ч и и и с я тем, что, с целью упрощения конструкции, он снабжен балкой, установленной на одном конце опорной штанги, а механизм вертикального перемещения механической руки выполнен в виде трособлочной системы, блоки которой и один конец троса установлены на балке, а второй конец троса - на механической руке, причем привод механической руки связан с вторым концом троса. г 00 ю Од СО
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Патент CltlA № 3888360, кл | |||
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
| Сплав для отливки колец для сальниковых набивок | 1922 |
|
SU1975A1 |
