Изобретение относится к машиностроению, в частности к захватам манипуляторов для механизации и автоматизации технологических процессов.
Цель изобретения - повышение надежности захвата.
На фиг.1 изображен захват с разведенными зажимами губками, обпщй вид;
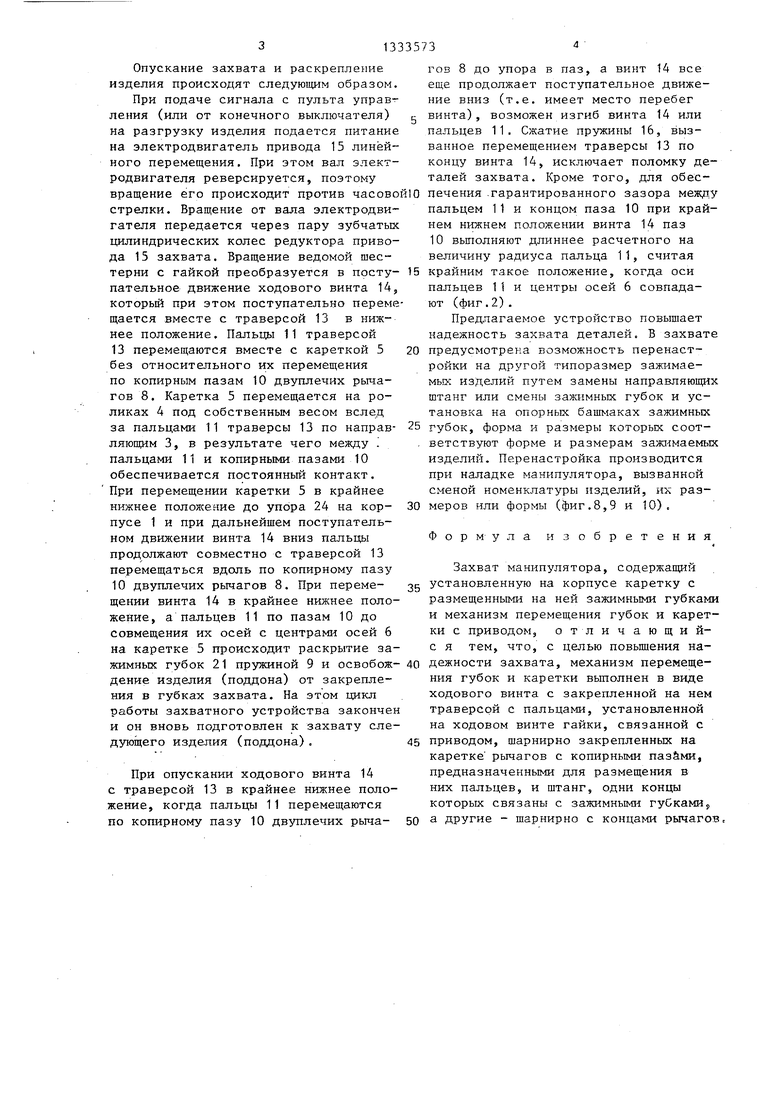
на фиг.2 - вид А на фиг.1; на фиг.З - ю ния. Вращение вала электродвигателя
разрез Б-Б на фиг.2.
Захват манипулятора размещен на корпусе 1, установленном, на продольных направляющих 2 с возможностью перемещения. На корпусе 1 расположены две направляющие штанги 3, на которых на роликах 4 установлена каретка 5, В нижней части каретки 5 с возможностью поворота на осях 6 установлены на опорных втулках 7 двуплечие рычаги 8, Двуплечие рычаги 8 подпружинены между собой прз жиной 9, закрепленной на проушинах, установленных в планках опорных втулок 7, и снабжены копир- ным пазом 10, в котором-размещен ПЕ;- лец 11 с втулкой 12, Пальцы 11 закреплены на траверсе 13, размещенной на нижнем конце винта 14 с возможностью перемещения. Винт 14 снабжен трапецеидальной резьбой и установлен в корпусе привода 15 с возможностью возвратно-поступательного движения вдоль своей оси. На нижнем конце винта выполнен упорный бурт, при этом между торцом бурта и траверсой 13 размещена амортизагщонная пружина 16, обеспечивающая безударное взаимодействие винта 14 с кареткой 5,
На траверсе 13 закреплена планка
17со штифтом, который установлен в
шпоночном пазу, выполненным на нижнем конце винта 14 под траверсой 13, На концах двуплечих рычагов 8 на осях
18шарнирно закреплены направляющие
штанги 19, на концах Которых, на опор-45 фиксируются 6ecKOHTaKTHbnvM конечныных башмаках 20 закреплены зажимные губки 21, Направляюш;ие щтанги 19 установлены в направляющих втулках 22 с возможностью перемещения относительно кронштейнов 23, закрепленных на каретке 5, Крайнее нижнее положение каретки 5 ограничено упором 24, закрепленным на корпусе 1,
Захватное устройство работает следующим образом,
В исходном положении перед захватом изделия в виде поддона (ящика) зажимные губки 21 разведены, ходовой винт 14 вместе с кареткой 5 находятся в -крайнем нижнем положении. Изделие, подлежащее захвату зажимньЕми губками 21, размещено между ними на . столе оперативного накопителя (фиг,1). При подаче сигнахса с пульта управления или от конечного выключателя подается электропитание электродвигателю привода 15 линейного перемещепо часовой стрсглке передается паре зубчатых цилиндрических колес, установленных в корпусе редуктора привода 15, Ведомая шестерня привода ре15 дуктора снабжена гайкой, которая размещена на резьбе ходового винта 14, Вращение ведомой щестерни с гайкой преобразуется в поступательное движение ходового винта 14, который
20 вместе с траверсой 13 перемещается вверх. При этом пальцы 11, закрепленные на траверсе 13 и размещенные в копирных пазах 10 двуплечих рычагов 8, начинают та1сже перемещаться вверх
25 Перемещение пальцев 11 по копирным пазам 10 вызывает пгсавньй поворот двуплечих рычагов 8 на осях 6, при этом происходит перемещение нижних концов рычагов 8 и направляющих штан
30 19 с зажимными губками 21. во втулках 22 относительно кронштейнов 23, При этом происходит плоскопараллельное прямолинейное схожде .ние зажимных губок 21 навстречу друг другу и закреп35 ление изделия в зажу.:мных губках за- ХЕ:ата, При дальнейшем поступательном движении ходового винта 14 вверх г пальцы 11 траверсой 13 перемещаются по копирному пазу 10 до упора, при
40 ЭТОМ каретка 5 вместе с зажатым в губках 2 изделием (поддоном) начинае перемещаться на роликах 4 по направляющим, штангам 3 корпуса 1 в в-ерхнее положение. Крайние положения каретки
0
5
ми выключателями. При крайнем верхнем положении каретки 5 верхний конечный выключатель снимает питание с электродвигателя привода линейного перемещения, одновременно с этим на пульте управления загорается сигнальная лам- почка, фиксирующая верхнее положение каретки 5 на корпусе 1 манипулятора. При крайнем нижнем положении каретки 5 нижний конечный выключатель снимает питание с электродвигателя привода, а на пульте управления загорается сигнальная лампочка - нижнее положение каретки 5 манипулятора.
3133
Опускание захвата и раскрепление изделия происходят следующим образом.
При подаче сигнала с пульта управления (или от конечного выключателя) на разгрузку изделия подается питание на электродвигатель привода 15 линейного перемещения. При этом вал электродвигателя реверсируется, поэтому
вращение его происходит против часовой О печения .гарантированного зазора между
стрелки. Вращение от вала электродвигателя передается через пару зубчатых цилиндрических колес редуктора привода 15 захвата. Вращение ведомой шестерни с гайкой преобразуется в посту- дательное движение ходового винта 14, который при этом поступательно перемещается вместе с траверсой 13 в нижнее положение. Пальцы 11 траверсой 13 перемещаются вместе с кареткой 5 без относительного их перемещения по копирным пазам 10 двуплечих рычагов 8. Каретка 5 перемещается на роликах 4 под собственным весом вслед за пальцами 11 траверсы 13 по направляющим 3, в результате чего между . пальцами 11 и копирными пазами 10 обеспечивается постоянный контакт. При перемещении каретки 5 в крайнее нижнее полонсение до упора 24 на корпусе 1 и при дальнейшем поступательном движении винта 14 вниз пальцы продолжают совместно с траверсой 13 перемещаться вдоль по копирному пазу 10 двуплечих рычагов 8. При переме- щении винта 14 в крайнее нижнее положение, а пальцев 11 по пазам 10 до совмещения их осей с центрами осей 6 на каретке 5 происходит раскрытие за
жимных губок 21 пружиной 9 и освобож- 40 дежности захвата, механизм перемещедение изделия (поддона) от закрепления в губках захвата. На этом цикл работы захватного устройства закончен и он вновь подготовлен к захвату следующего изделия (поддона).
При опускании ходового винта 14 с траверсой 13 в крайнее нижнее положение, когда пальцы 11 перемещаются по копирному пазу 10 двуплечих рыча-
гов 8 до упора в паз, а винт 14 все еще продолжает поступательное движение вниз (т.е. имеет место перебег винта), возможен изгиб винта 14 или
пальцев 11. Сжатие пружины 16, вызванное перемещением траверсы 13 по концу винта 14, исключает поломку деталей захвата. Кроме того, для обес
пальцем 11 и концом паза 10 при крайнем нижнем положении винта 14 паз 10 выполняют длиннее расчетного на величину радиуса пальца 11, считая крайним такое положение, когда оси пальцев 11 и центры осей 6 совпадают (фиг.2).
Предлагаемое устройство повыщает надежность захвата деталей. В захвате предусмотрена возможность перенастройки на другой типоразмер зажимае- мьк изделий путем замены направляющих штанг или смены зажимных губок и установка на опорных башмаках зажимных губок, форма и размеры которых соот- ветствуют форме и размерам зажимаемых изделий. Перенастройка производится при наладке манипулятора, вызванной сменой номенклатуры изделий, их размеров или формы (фиг.8,9 и 10).
Формула изобретения
Захват манипулятора, содержащий установленную на корпусе каретку с размещенными на ней зажимными губками и механизм перемещения губок и каретки с приводом, отличающий- с я тем, что, с целью повьщ1ения нания губок и каретки выполнен в виде ходового винта с закрепленной на нем траверсой с пальцами, установленной на ходовом винте гайки, связанной с приводом, шарнирно закрепленных на каретке рычагов с копирными паз&ми, предназначенными для размещения в них пальцев, и штанг, одни концы которых связаны с зажимными губкамиу а другие - щарнирно с концами рычаго
-2
Стол onepofni/S oso HQffoname/f/f
2120
22 152if
Фиг. г
JS
урРбемь стола Dfjfflo- rnulHOso HOKOnumejfS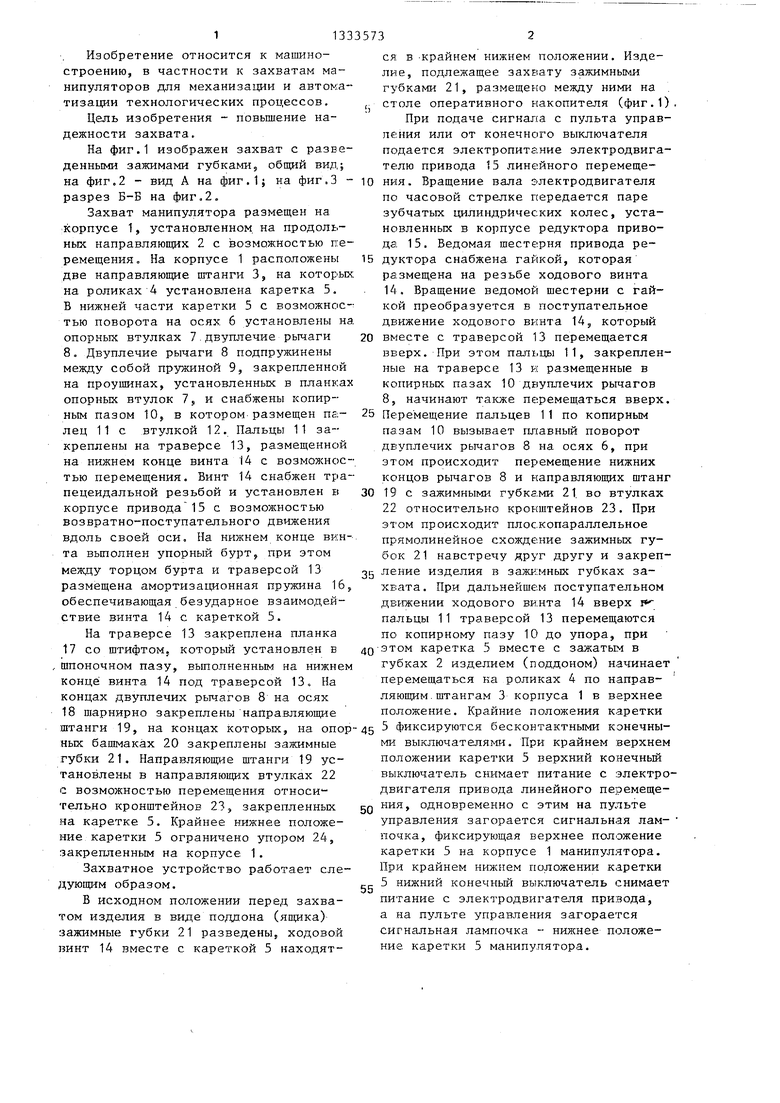
| название | год | авторы | номер документа |
|---|---|---|---|
| Гибкий производственный модуль для штамповки изделий из ленточного материала | 1989 |
|
SU1713709A1 |
| Захватное устройство | 1989 |
|
SU1708603A1 |
| Автоматизированный комплекс для штамповки крупногабаритных деталей | 1985 |
|
SU1324725A1 |
| Машина самоходная гусеничная малогабаритная для подъема и установки бордюрного камня. | 2022 |
|
RU2785102C1 |
| Схват манипулятора | 1983 |
|
SU1057273A1 |
| Установка для межоперационного перемещения заготовок | 1982 |
|
SU1061904A1 |
| Установка для центробежной биметаллизации втулок | 1984 |
|
SU1260110A1 |
| Устройство для мерной резки провода | 1981 |
|
SU1134266A1 |
| УСТРОЙСТВО ДЛЯ ЗАГРУЗКИ ЗАГОТОВОК В ПРЕСС | 1993 |
|
RU2063287C1 |
| УСТРОЙСТВО ДЛЯ УДЕРЖАНИЯ И СБРОСА ОБЪЕКТА | 2012 |
|
RU2517794C1 |


Изобретение относится к машиностроению, в частности к захватам манипуляторов. Цель изобрете21ия повышение надежности захвата. Изобретение содержит корпус, установленную на корпусе с возможностью перемещения каретку с зажимными губками и привод их перемещения, выполненный в виде винта, связанного с траверсой, на траверсе закреплены пальцы, а на зажимных губках закреплены двуплечие рычаги с копирными пазами, в которых размещены пальцы траверсы. При перемещении пальцев по пазам двуплечие рычаги поворачиваются и губки получают линейное перемещение. 3 ил. § 00 00 со ел со
и
Составитель Е. Щеславская Редактор Л. Повхан Техредjи.Попович Корректор В. Бутяга
Заказ 3913/17 Тираж 951 .Подписное
ВНИШТИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д. 4/5
Производственно-полиграфическое предприятие, г. Ужгород, ул. Проектная, 4
| Автооператор | 1976 |
|
SU569431A2 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
