1
Изобретение относится к электрическому транспортуэ а именно к электроподвшккому состав : с незави- симьш .возб ггодегшем тяговых электродвигателей и автоматически -; управлением рекуперативньм торможением,.
Цель изобретения - повыиение надежности и точности.
На чертеже представлена функциональная блок-схема предложенного устройства.
Устройство для управления электрическим торможением электроподвижного состава переменного тока содержит тиристорный преобразователь 1 в цепи питания якорной обмотки 2 тягового эхЕектродвигателя, соединенный управляющим входом с выходом Фазо- .смещающего блока 3, вход которого подключен к выходу управляемого функционального преобразователя 4, соединенного управляющим входом с выходом, сумматора 5, а информационном входом - с выходом регулятора б ток якорной обмотки, вход которого гход- .ключен к выходу блока 7 сравнения, соединенного входами соответствен-- но с выходом задатчика 8 и датчика тока якорной обмотки 2 тягового
U
2 з:пектродвигателя5 обмотка 10 возбуждения которого подключена к источ- . вику питания через трансформатор , 11 и управляемый вы,п.рямитель 12, соединенный управляющим входом с выходом фазосмещалэщего блока 185 вход которого подключен к выходу регулятора 14 тока обмотки возбз жд,ения5 , соединенного входом с выходом блока 15 сравнения входы которого подключены соответственно к выходу датчика 16 тока обмотки 10 возбужде- ния тягового электродвигателя и к выходу ограничителя 17 напряжения, соединенного входом с выходом блока 18 деления 5 входы которого соединены соответственно с выходом датчика 19 частоты вращения тягового электродвигателя к с выходом сумматора 20,, подключенного входами соответственно к выходу рег-/лятора 6 тока.якорной обмотки и к выходу датчика 21 напряжения5 связанному с одним из входов су№;1атора 5; с другим входом которого соединен через усилитель 22 Еьпсод датчика 19 частоты вра щения тя- i-oBoro электродвигателя5 при этом в цепь питания якорной обмотки 2 тя гового электродвигателя включен ста- бйлизнрующий резистор 23„
10
15
20
25
30
Устройство управления работает следуюпщм образом.
По сигналу с задатчика 8 заданное значение тока якорной обмотки по- 5 ступает на блок 7 сравнения,где сравнивается с сигналом, пропорциональным истинному значению тока и поступающим с датчика 9 тока якоря, На выходе блока 7 сравнения выделяется сигнал ошибки и поступает на регулятор 6 тока якоря, где преобразуется в сигнал, пропорциональный требуемому значению тока якорной .обмотки. Выходной сигнал регулятора-6 тока якоря поступает на первый . вход сумматора 20 и основной вход управляемого функционального преобразователя 4, на управляющий вход которого поступает выходной сигнал сумматора 5. Выходной сигнал сумматора 5 образуется в результате алгебраической суммы взятого со знаком плюс выходного сигнала датчика 21 напряжения питания тиристорного преобразователя 1 и взятого со знаком минус выходного сигнала усилителя 22, на вход которого поступает выходной сигнал датчика 10 частоты вращения двигателя. При этом выходной сигнал усилителя 22 получается в результате . усиления выходного сигнала датчика 19 частоты вращения двигателя feo значения, пропорционального произведению частоты вращения и номинально- 35 го значения тока возбуждения. Полученная на выходе сумматора 5 алгебраг- ическая сумма сигналов подается на управляющий вход функционального пре- %бразователя 4, Сигнал, поступакиций 40 с выхода регулятора 6 тока якоря на основной вход функционального преобразователя 4, меньше, чем абсолютное значение сигнала, поступающего с выхода сумматора 5 на уп- дз равляющий вход функционального преобразователя 4, его выходной сигнал равен нулю, В то же время на выходе сумматора 20, на второй вход которого поступает выходной сигнал датчика 21 напряжения питания тиристорного- преобразователя 1, получается сумма сигналов. Эта сумма сигналов поступает на первый вход блока (Is деления,в котором делится на сиг- нал, пропорциональньй частоте вращения и поступающий на его второй вход с выхода датчика 19 частоты вращения двигателя. Сигнал, пропорциональ10
15
20
25
30
5 35-40 дз8790
ный частному от деления, получаемый на выходе блока 18 деления, поступает через ограничитель 17 напряжения
на один из входов блока 15 сравнения. Пока сигнал на выходе блока 18 деления меньше уровня ограничения на ог раничителе 17 напряжения, сигнал задания тока возбуждения на выходе ограничителя 17 напряжения .равен его в: одному сигналу, В. блоке 15 д сравнения сигнал задания тока возбуждения сравнивается с выходным сигналом датчика 1б тока, пропорциональным истинному значению тока возбуж-. дения. На выходе блока 15 сравнения выделяется сигнал ощибки и поступает на регулятор 14 тока во зубжде- ния, где преобразуется в сигнал,про- . порциональный требуемому значению тока возбуждения. Этот сигнал поступает на фазосмещающий блок 13, на выходе которого формируются импульсы управления, фаза которых определяется величиной заданного значения тока., возбуждения, Имхгульсы управления поступают на управляющий вход вьшрямителя 12, который увеличивает напряжение на обмотке 10 возбуждения ,
После того, как ток возбуждения тягового двигателя достигает номинального значения, а выходной сигнал ограничителя 17 напряжения - уровня ограничения, изменение тока возбуждения прекращается и начинается изме нение выходного напряжения тиристорного преобразователя 1, Действительно, как только значение сигнала, пропорциональногоV требГуемому значению тока и поступающего с выхода регулятора 6 тока якорной обмотки на основной вход функционального преобразователя 4, становится больще абсолютного значения сигнала, поступающего с выхода сумматора 5 на управляющий вход преобразователя 4, последний вступае.т в работу. На его выходе появляется сигнал, который поступает на фазосмещающий блок 3, На выходе этого блока формируются импульсы управления, фаза которых определяется величиной угла зажигания тиристорного преобразователя 1, необходимого для поддержания . угла погасания при изменяющемся угле коммутации, а,также угла открытия тиристоров, необходимого для регулирования выходного напряжения тиристорного преобразователя 1 Импульсы управления поступают на его управляющий вход инвертирует постоянное напряжение тягового двигателя, работающего в генераторном режиме,в переменное,
Формулаизобретения
Устройство для управления электрическим торможением электроподвиж- |Ного состава переменного тока, содержащее Тиристорный преобразователь в цепи питания якорной обмотки тягового электродвигателя,соединенный уп равляющим входом с выходом первого ,фазосмещанщего блока, вход которого подключен к выходу функционального преобразователя, соединенного информационным входом с выходом регулятора тока якорной обмоч-ки, подключенного входом к выходу одного из блоков сравнения, входы которого соединены соответственно с выходом задатчика и датчика тока якорной обмотки тягового электродвигателя,обмотка возбуждения которого подключена к .источникупитания через управляемый выпрямитель, управлянщий вход которого подключен .к выходу второго
10
фазосмещающего блока, соединенного входом с выходом регулятора тока обмотки возбуждения, связанного входом с выходом второго блока сравнения, ВХ.ОДЫ которого подключены соответственно к выходу датчика тока обмотки возбуждения и выходу ограничителя напряжения, отличающееся тем, что, с целью повышения надежности и точности, оно снабжено двумя сумматорацш, блоком деления, датчиком частоты вращения тягового электродвигателя, датчиком напряже- - 5 ния,, а функциональный преобразователь выполнен управляемым, управляющий вход которого соединен с выходом первого сумматора, входы которого подключены соответственно к выходу датчика напряжения и через уси20
25
30
литель к выходу датчика частоты вращения тягового электродвигателя, связанному с одним из входов блока деления, другой вход которого подключен к выходу второго сумматора, соединенного входами соответственно с выходом датчика напряжения и выходом регулятора тока якорной обмотки, при этом выход блока деления подключен к.входу ограничителя напряжения.
фазосмещающего блока, соединенного входом с выходом регулятора тока обмотки возбуждения, связанного входом с выходом второго блока сравнения, ВХ.ОДЫ которого подключены соответственно к выходу датчика тока обмотки возбуждения и выходу ограничителя напряжения, отличающееся тем, что, с целью повышения надежности и точности, оно снабжено двумя сумматорацш, блоком деления, датчиком частоты вращения тягового электродвигателя, датчиком напряже- 5 ния,, а функциональный преобразователь выполнен управляемым, управляющий вход которого соединен с выходом первого сумматора, входы которого подключены соответственно к выходу датчика напряжения и через уси0
25
30
литель к выходу датчика частоты вращения тягового электродвигателя, связанному с одним из входов блока деления, другой вход которого подключен к выходу второго сумматора, соединенного входами соответственно с выходом датчика напряжения и выходом регулятора тока якорной обмотки, при этом выход блока деления подключен к.входу ограничителя напряжения.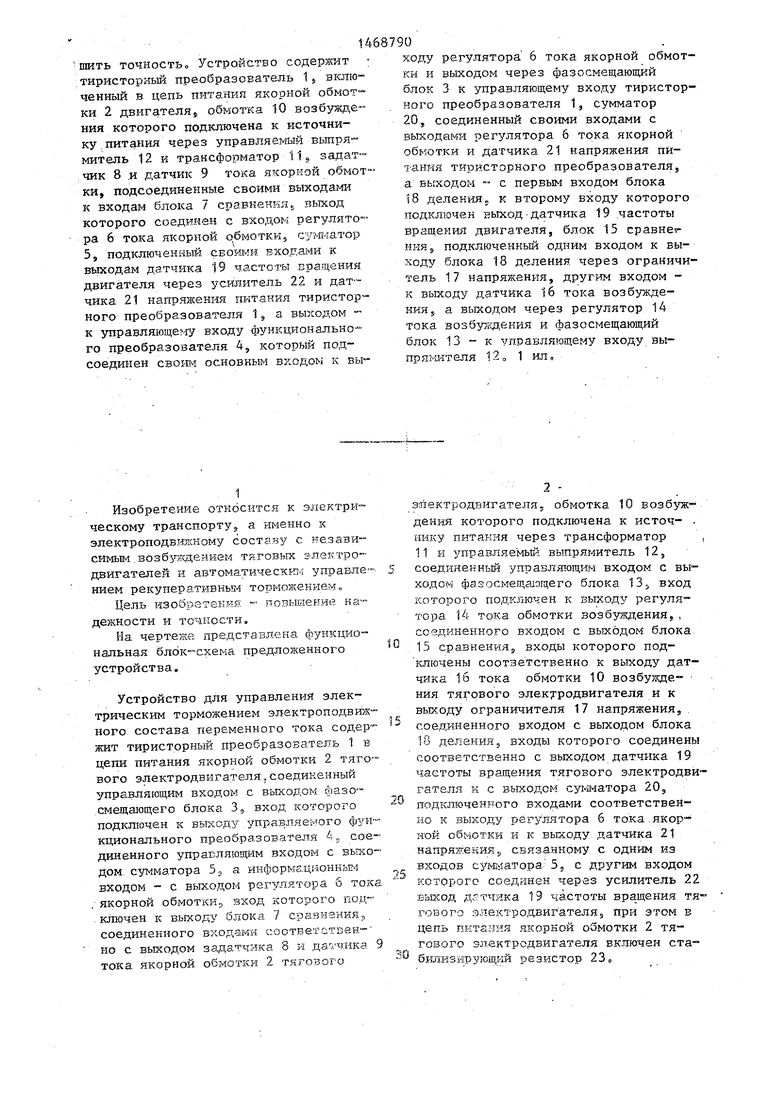
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для электрического торможения электроподвижного состава переменного тока | 1982 |
|
SU1079491A1 |
| Устройство для выравнивания нагрузок тяговых электродвигателей подвижного состава | 1985 |
|
SU1232521A1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ТЯГОВЫМ ПРИВОДОМ ЭЛЕКТРОВОЗА ПЕРЕМЕННО-ПОСТОЯННОГО ТОКА | 1990 |
|
RU2026209C1 |
| Электропривод | 1985 |
|
SU1277346A1 |
| Электропривод переменного тока | 1986 |
|
SU1332506A1 |
| ЭЛЕКТРИЧЕСКИЙ ПРИВОД ПРОКАТНОГО СТАНА | 2013 |
|
RU2539631C1 |
| ЭЛЕКТРОПРИВОД | 2003 |
|
RU2254665C2 |
| Устройство для управления электроприводом комплекса для выборки кошелькового невода | 1988 |
|
SU1613081A1 |
| Регулируемый электропривод | 1988 |
|
SU1545317A1 |
| Реверсивный электропривод | 1988 |
|
SU1667213A1 |
Изобретение относится к устройствам, используемым на злектропо- движном составе с автоматической системой управления рекуперативным торможением при независимом возбулздении тяговых машин, и позволяет повысить надежность устройства, а также улуч