Q
мйь
сд ю ч
1C
: Изобретение относится к транспорту и может быть использовано на электроподвижном составе.
Цель изобретения - повьшение точ145
10
0
ности.
На чертеже представлена функциональная схема устройства для управле- ния тяговыми двигателями транспортного средства.
Устройство для управления тяговыми двигателями транспортного средства содержит задатчик 1 тока в обмотках 2 якорей тяговых двигателей, к выходу которого подключены один из вхо- дов ограничителей 3 тока, другие входы которых подключены к выходам блоков 4 сравнения и блока 5 вьделения максимального тока, входы которого, а также одни из входов блоков 4 сравнения и регуляторов 6 тока соединены с выходами датчиков 7 тока в обмотках якорей. Выходы датчиков 8 частоты вращения тяговых двигателей и ограничителей 3 тока соединены с вхо-25
дами регуляторов 9 частоты вращения, подключенных выходами к входам регу- ляторов 6 тока, выходы которых соединены с входами тиристорных преобразователей 10, к вькодам которых подклю- д чены обмотки 2 якорей тяговых двигателей
Устройство работает следующим образом.
При пуске выходной сигнал задатчи- ка 1 тока в обмотках 2 якорей тяго-. вых двигателей поступает на входы ограничителей 3 тока. Выходные сигналы ограничителей 3 тока подаются на входы регуляторов 9 частоты вращения, дд выходные сигналы которых определяют фазу управлянщих импульсов на выходах регуляторов 6 foKa, В результате это- го на выходах тиристорных преобразователей 10 формируются выходные напряжения, которьге прикладываются к тяговым двигателям.
Поскольку характеристики тяговых двигателей отличаются друг от друга, то первым вступит в работу двигатель, обладающий наименьшим сопротивлением якорной обмотки 2, т,е, двигатель, ток в якорной цепи которого будет максимальным по отношению к токам нагрузки других тяговьос двигателей. Так как в качестве сигнала обратной связи для ограничителей 3, тока используется максимальный из токов тяговых двигателей, то токи в якор-
35
45
50
55
0
0
5
ддд27222
ных цепях других двигателей будут меньше, чем его заданное значение, В процессе движения начинает сказываться ра;зброс магнитных характеристик двигателей и токи в них могут перераспределяться в зависимости от изменения разброса характеристик, но на выходе блока 5 будет всегда вьщеляться максимальный из токов, величина которого соответствует заданию, . сформированному задатчиком 1.
Выравнивание токов по тяговым двигателям происходит следующим образом. При отсутствии процесса боксо- вания в блоках 4 сравниваются текущие значения токов с максимальным, выделяемым блоком 5,
В результате этого на выходах блоков 4 сравнения формируются сигналы, которые, поступая на другие входы соответствующих ограничителей 3 тока, увеличиваю напряжение на выходах регуляторов 9 до величины, при которой токи соответствующих двигателей увеличиваются до уровня I,c максимального из них,
L Таким образом, в процессе пуска и движения предлагаемого устройстве тяговые двигатели транспортного cpe ства будут благодаря принудительному выравниванию работать с одинаковыми токами, величина которых соответствует значению максимального из них.
Работу устройства при изменениях нагрузки (коэффициента сцепления) рассмотрим на примере одного тягового ;двигателяо
35
При изменении нагрузки (коэффициента сцепления) тягового двигателя происходит снижение тока в обмотке 2 якоря, который становится меньше 1,цд,5. Если разность между текущим I, и максимальным значениями тока превысит пороговое значение 41, то в блоке 4 сравнения сигнал с выхода блока 5 снижается до уровня который на величину dl меньше текущего значения тока 1д в обмотке 2 якоря. При этом происходит форсированное снижение уровня сигнала на выходе блока 4 сравнении и:соответственно напряжения на выходе тирнсторного преобразователя.
Тяговое усилие, развиваемое тягр- вым двигателем, снижается. При восстановлении сцепления колесной пары транспортного средства с рельсом происходит плавное увеличение тока в обмотке 2 якоря до величины 1, .
Если в результате снижения напряжения на обмотке 2 якоря боксование не прекратилось и ток продолжает уменьшаться, то при , ,/ii в функциональном преобразователе произойдет дальнейшее снижение сигнала с выхода блока 5 до уровня jMtfRC который на величину Л1 меньше текущего значения тока Хд.
В результате сигнал на выходе блока 4 сравнения и напряжение на выходе тиристорного преобразователя снижается до тех пор, пока колесная пара, связанная с рассматриваемым двигателем, не начнет работать без боксования. После чего сигнал на выходе функционального преобразователя начинает плавно нарастать пока ток в двигателе не достигнет значения 1дацс .
Формула изобретения
Устройство для управления тяговыми двигателями транспортного средства, содержащее задатчИк тока в обмотках якорей тяговых двигателей и по числу тяговых двигателей датчики
частоты вращения и тока в обмотках якорей, регуляторы тока и частоты вращения и тиристорные преобразователи, к выходам которых подключены обмотки якорей соответствующих тяго- фых двигателей, а к входам - выходы соответствующих регуляторов тока, соединенньрс входами с выходами соотQ ветствующих датчиков тока и регуляторов частоты вращения, подключенных . одними из входов к выходам соответст- вукгщх датчиков частоты вращения, отличающееся тем, что,
5 с целью повышения точности, оно
снабжено блоком вьщеления максимального тока и по числу тяговых двигателей блоками сравнения и ограничителями тока, выходы которьк соединены с
0 ДУРГими входами соответствуюрщх регуляторов частоты вращения, а входы - с выходами задатчика тока в обмотках якорей тяговых двигателей, бл.ока выделения максимального тока и соот5 ветствующих блоков сравнения, подключенных одними из входов к выходам соответствующих датчиков тока в обмотках якорей, а другими - к выходу блока выделения максимального тока,
0 соединенного входами с выходами датчиков тока в обмотках якорей.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для регулирования силы тяги и торможения электроподвижного состава при автоматическом управлении | 2019 |
|
RU2739552C1 |
| УСТРОЙСТВО ДЛЯ РЕГУЛИРОВАНИЯ НАГРУЗКИ ТЯГОВЫХ ДВИГАТЕЛЕЙ ЭЛЕКТРОПОДВИЖНОГО СОСТАВА | 1990 |
|
RU2034721C1 |
| Устройство для электрического торможения электроподвижного состава переменного тока | 1982 |
|
SU1079491A1 |
| АВТОМАТИЗИРОВАННОЕ УСТРОЙСТВО ДЛЯ ЗАЩИТЫ ОТ БОКСОВАНИЯ КОЛЕСНЫХ ПАР ЭЛЕКТРОПОДВИЖНОГО СОСТАВА | 2013 |
|
RU2540223C1 |
| Устройство для управления электрическим торможением электроподвижного состава переменного тока | 1987 |
|
SU1468790A1 |
| Устройство для управления тяговыми электродвигателями транспортного средства | 1987 |
|
SU1463550A1 |
| Устройство для регулирования частоты вращения тяговых двигателей электроподвижного состава | 1980 |
|
SU956326A1 |
| Способ регулирования силы тяги и торможения электроподвижного состава при автоматическом управлении | 1981 |
|
SU1068305A1 |
| Устройство для управления тяговыми двигателями транспортного средства | 1986 |
|
SU1402453A1 |
| УСТРОЙСТВО ДЛЯ ЗАЩИТЫ ОТ БОКСОВАНИЯ И ЮЗА КОЛЕСНЫХ ПАР ЭЛЕКТРОПОДВИЖНОГО СОСТАВА | 1991 |
|
RU2025310C1 |
Изобретение относится к транспорту и может быть использовано на электроподвижном составе. Цель изобретения - повьппение точности. Устройство для зттравления тяговыми двигателями транспортного средства содержит задатчик 1 тока в обмотках 2 якорей тяговых двигателей, к выходу которого подключены один из входов ограни- читалей 3 тока, другие входы которых подключены к выходам блоков 4 сравнения и блока 5 вьщелен ия максимального тока, вхЪды которого, а также одни из входов блоков 4 сравнения и регуляторов 6 тока соединены с выходами датчиков 7 тока в обмотках якорей. Выходы датчиков 8 частоты вращения тяговых двигателей и ограничителей 3 тока соединены с входами регуляторов 9 частоты вращения, подключенных выходами к входам регуляторов 6 тока, выходы которых соединены с входами тиристорных преобразователей 10. 1 ил. а $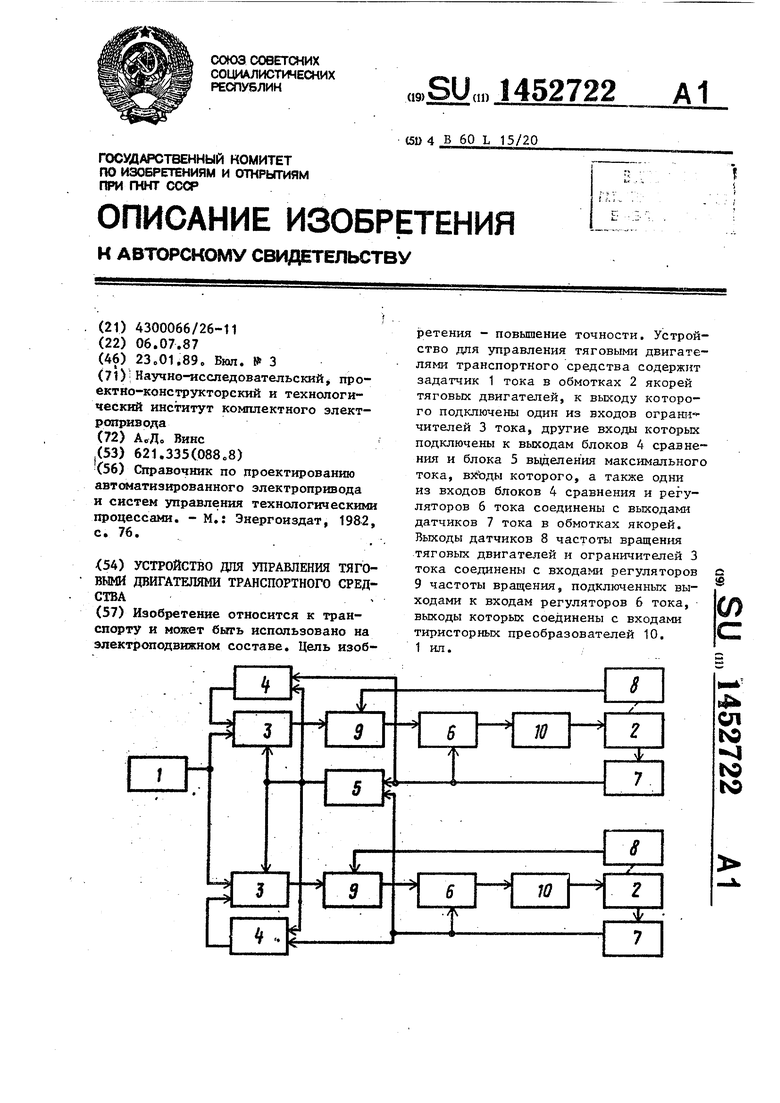
| Справочник по проектированию автсматизированного электропривода и систем управления технологическими процессами | |||
| - М.: Энергоиздат, 1982, с | |||
| Аппарат, предназначенный для летания | 0 |
|
SU76A1 |
| Видоизменение прибора для получения стереоскопических впечатлений от двух изображений различного масштаба | 1919 |
|
SU54A1 |
