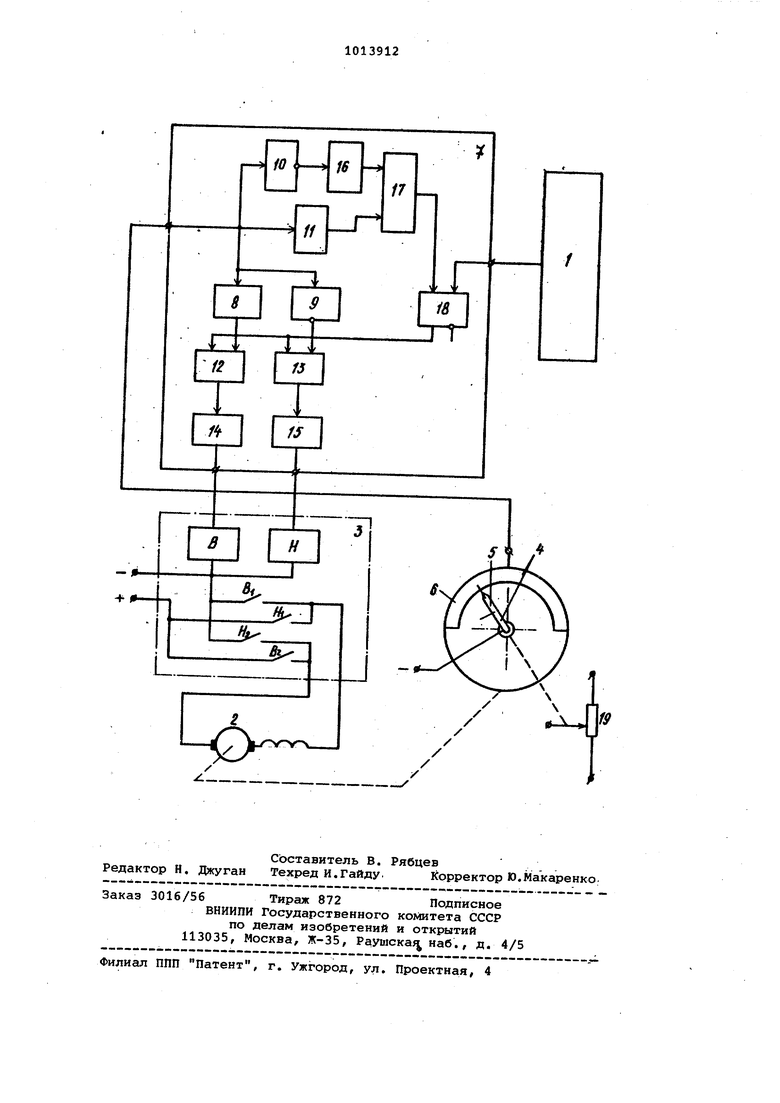
Изобретение относится к автомати ческому регулированию и может быть использовано для дистанционной уста новки нулевоЕо положения датчиков уг ловых отклонений и перемещений, при меняемых в системах автоматического контроля. Известно устройство, содержащее потенциометрические датчики, позволяш№1е дистанционно измерять угловые отклонения и перемещения органов управления ; Недостаток устройства - низкая iTO4HOCTb. Наиболее близким к предлагаемому является устройство для дистанционной установки нулевого положения датчиков, содержащее пульт управления, электродвигатель, элементы его пуска и останова, потенциометр для отработки положения электродвигателя и схему управления, содержащую поляризованное реле и реверсивный распределитель, переключенные элементы которого подсоединены к отводам секций срабатывающего потенциойетра. Управление приводом пр изводится подачей на реверсивный . распределитель команды, устанавлива ющей щетку распределителя на нужную ламель. Поляризованное реле срабатывает за счет разности потенциалов между точкой потенциометра, соедине ной с заданной ламелью распределителя, и движком потенциометра и подключает соответствующие магнитные пускатели, а через них - электродвигатель; исполнительного механизма в соответствующую сторону. По ле того,- как .двигатель , отработает заданное перемещение и переведет движок потенциометра в точку, соединенную с заданной ломелью распределителя , напряжение на реле исчезнет, оно отключится и отключит элект родвигатель 2. Недостатками известного устройст ва являются невысокая точность уста новки заданного положения и низкая надежность, что определяется применением поляризованного реле, статическая характеристика которого имеет зону нечувствительности. Это при водит к тому, что устройство не может отработать малые положения. Попытка увеличить чувствительность реле за счет применения усилителей может привести к возникновению авто колебаний, так.как двигатель за счет инерции ротора будет проходить через нулевое положение даже после отключения питания. Это приве дет к снижению надежности функцио.нирования устройства. Целью изобретения является повы;шение точности за счет ликвидации зоны нечувствительности. Указанная цель .дoctигaeтcя тем, .что устройство для дистанционной установки положения датчиков, содержащее пульт управления, электродвига;Тель с реверсивным направлением Вращения, элементы его пуска и останова, сигнализатор положения, корпус которого соединен с валом электродвигателя, и блик управления, выход которого соединен с входами элементов пуска и останова электродвигателя, сигнализатор;(положения выполнен в виде взаимодействующей пары элементор, один из которых неподвижен, а другой установлен с возможностью перемещения относительно неподвижного элемента и обеспечения появления ступенчатого сигнала, при этом выход сигнализатора соединен с первым входом блока управления, включающего в себя повторитель, первый и второй инверторы, первый формирователь импульсов, входы которых соединены с первым входом блока управления, а к выходу повторителя и первого инвертора соответственно подключены первые входы элементов И, а выход второго инвертора соедийен с входом второго формирователя импульсов причем выходы формирователей .„ импульсов подсоединены к входам элемента ИЛИ, к выходу которого подсоединен первый вход триггера, второй вход которого соединен с выходом пульта управления, кроме того, выход триггера соединен с вторыми вхо-дами элементов И, выходы которых через усилитель подключены к соответствующим входам элементов пуска и останова электродвигателя. Причем взаимодействующая пара элементов сигнализатора выполнена в виде подвижного контакта, закрепленного на оси датчика, и контактной площадки, закрепленной на корпусе датчика, электрически изолированной от него и выполненной по дуге, равной половине длины окружности. На.чертеже представлена схема устройства. Устройство для дистанционной установки положения датчиков содеруккт пульт 1 управления, электродвигатель. 2 с реверснвньом направлением вращения, элементы 3 его пуска и останова,- сигнализатор 4 нулевого положения, состоящий иэ подвижного контакта 5 и контактной площадки б, и блок 7 управления. Блок управления содержит повторитель 8, инверторы 9 и 10, первый формирователь 11 импульсов, элементы И 12 и 13, усияители 14 и 15, второй формирователь 16 импульсов, элемент ИЛИ 17 и триггер 18. Потенциометрический датчик (потенциометр) 19 и установленная на егокорпусе контактная площадка 6 связаны с валом электродвигателя 2. Сигнализатор 4 нулевого положения выстав ляется при сборке таким образом, чт бы граница контактной площадки 6 была совмещена с началвным витком обмотки потенциометра 19, а подвижный. контакт располагается параллель но щетке потенциометра 19. Тогда положение контакта на границе контактной площадки будет соответствовать нулевому положению потенцирметра. Устройство работает следующим образом. Отклонение потенционютра относительно нулевого положения может замкнуть подвижный контакт 5 сигнал затора с контактной площадкой 6. При этом, на первый вход блока управления поступает сигнал отрицател ной полярности, соответствующий логической 1. Сигнал проходит повто ритель 8 и инвертор 9, соответствен но на первом входе элемента И 12 пристуствует логическая 1, а элемента И 13 - логический О. Устройство запускается сигналом пульта 1 управления, который переводит триггер 18 в единичное состояние, с выхода триггера логическа Ч поступает на вторые входы элементов И 12 и 13. С выхода элемента И 12 логическая 1 поступает на усилитель 14, который включает соответствующий магнитный пускатель, а через него электродвигатель, разворачивакяций корпус потенциометра в сторону нулевого положения. При смещении потенциометра от нулевого положения такнм образом, что подвижный контакт 5 разомкнут с контактной площадкой 6, логическая 1 присутствует на первом входе элемента И 12 и 13 л усилитель 15 включает другой магнитный пускатель. В момент прохождения подвижным контактом 5 границы контактной площадки б (независимо от напряжения движения ) происходит сброс триггера 18, с элементов И 12 и 13. снимается разршаающая логическая 1, усилитель 14 и 15 отключает- : соответствующий магнитный пускатель и двигатель прекращает разворот потенциометра. Сброс триггера в нулевое состояние осуществляется импульсюм с выхода элемента ИЛИ 17. Перепад сигнала, образующийся в момент прохождения подвижным контактом гра ницы контактной площадки, поступает; на формирователи 11 и 16 импульсов, с выходов которых импульсный сигнал: через элемент ИЛИ поступает на триггер 18. Таким образом, при каждом замыкании или разкыкании контактной группы сигнализатора на выходе элемента ИЛИ появляется отрицательный импульс, переводящий триггер в нулевое состояние. Устройство позволяет повысить точность установки нулевого положения датчика в 2-3 раза, обеспечить повышение производительности труда при проведении измерений в среднем на 10%.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления судовым агрегатом | 1975 |
|
SU596995A1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ТРАНСПОРТНЫМ ПОТОКОМ СЫРЬЕВЫХ КОМПОНЕНТОВ СТЕКОЛЬНОЙ ШИХТЫ | 1991 |
|
RU2026806C1 |
| Устройство управления насосным агрегатом | 1990 |
|
SU1707256A1 |
| Устройство сопровождения и адресования объектов на конвейере | 1990 |
|
SU1813687A1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ НАКОПИТЕЛЕМ УТОЧНОЙ НИТИ | 2001 |
|
RU2206489C1 |
| Устройство для автоматического управления линией приготовления многокомпонентных смесей | 1988 |
|
SU1649504A1 |
| ТРЕНАЖЕР ВОДИТЕЛЯ ТРАНСПОРТНОГО СРЕДСТВА | 1992 |
|
RU2025784C1 |
| Устройство для дистанционного управления и контроля | 1973 |
|
SU491971A1 |
| Устройство для управления вентильным электродвигателем | 1983 |
|
SU1166255A1 |
| Устройство для торможения противовключением трехфазного асинхронного электродвигателя | 1988 |
|
SU1577044A1 |
1. УСТРОЙСТВО ДЛЯ ДИСТАНЦИОННОЙ УСТАНОВКИ ПОЛОЖЕНИЯ ДАТЧИКОВ, содержащее пульт управления, электродвигатель с реверсивным направлением вращения, элементы его пуска и останова, сигнализатор положения, корпус которого соединен с валом электродвигат§ля, и блок управления, выход которого соединен с входами элементов пуска и останова электродвигателя, отличающееся тем, ..что, с целью повышения точности устройства путем ликвидации зоны нечувствительности, сигнализатор положения выполнен в виде взаимодействующей пары элементов, один из которых неподвижнен, а другой установлен с возможностью перемещения относительно неподвижного элемента и обеспечения появления ступенчатого сигнала, при этом выход сигн.ализатора соединен с первым Асодом блока управления, включающего в себя повторитель, первый и второй инверторы , первый формирователь импульсов, входы которых соединены с первым входом блока управления, к выходу повторителя и первого инвертора соответственно подключены первые входы элементов И, а выход второго инвертора соединен с входом второго формирователя импульсов, причем выходы формирователей импульсов подсоединены к входам элемента ИЛИ, к выхоЯу которого подсоединен первый вход триггера, второй вход которого соеди ен j с выходом пульта управления, кроме (/) того, выход триггера соединен с вторыми входами элементов И выходы которых через усилители подключены к соответствукяцим входам э91ементов пуска и останова электродвигателя. 2. Устройство по п. 1,отличаю щ е е с я тем, что взаимодействующая пара элементов сигнализатора выполнена в виде подвижного контакта, закрепленного на оси датчика, и контактной площадки, закрепленной на корпусе датчика, электрически изолированной от него и выполненной по дуге,равной половине длины окружности.I
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Гольден Д.В., Маврин В.Н | |||
| Регулирование и контроль бортового пилотажно-навигационного оборудования при поточном производстве.- Авиационная промышленность, 1979, № 1 | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Насос | 1917 |
|
SU13A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
