4 ч1
00
со
Изобретение относится к устройствам, предназначенным для определения габаритов транспортного средства.
Известно устройство для определения пространственных перемещений кузова рельсового транспортного средства, содержащее датчики соответственно горизонтальных и вертикальных ускорений, блоки измерения углов поворотов относительно продольной, поперечной и вертикальной осей кузова транспортного средства, блок коррекции горизонтальных ускорений, подключенный входами соответственно к датчику горизонтальных ускорений и блоку определения угла поворота относительно продольной оси кузова, а выходом - к одному входу интегратора, выходы которого через блок масштабирования подключены к входам блоков определения соответственно горизонтальных и вертикальных перемещений 1.
Однако известное устройство не учитывает погрешностей при измерении вертикальных ускорений, что снижает точность устройства. Цель изобретения - повышение точности. Поставленная цель достигается тем, что устройство для определения пространственных перемещений кузова рельсового транспортного средства, содержашее датчики соответственно горизонтальных и вертикальных ускорений, блоки измерения углов поворотов относительно продольной, поперечной и вертикальной осей кузова транспортного средства, блок коррекции горизонтальных ускорений, подключенный входами соответственно к датчику горизонтальных ускорений и блоку определения угла поворота относительно продольной оси кузова, а выходом - к одному входу интегратора, выходы которого через блок масштабирования подключены к входам блоков определения соответственно горизонтальных и вертикальных перемещений, снабжено блоком коррекции вертикальных ускорений, первый вход которого подключен к датчику вертикальных ускорений, а два других - к выходам соответственно блока определения угла поворота относительно продольной оси кузова и блока определения угла поворота относительно поперечной оси кузова, а выход подключен к другому входу инвертора.
Кроме того, блок коррекции вертикальных ускорений снабжен элементом квадрирования, инвертором, сумматором, выходом которого образован выход блока коррекции, одним входом сумматора - первый вход блока коррекции, а два других входа сумматора соединены с двумя выходами инвертора, два входа которого подключены соответственно к двум выходам элемента квадрирования, двумя входами которого образованы два других входа блока коррекции.
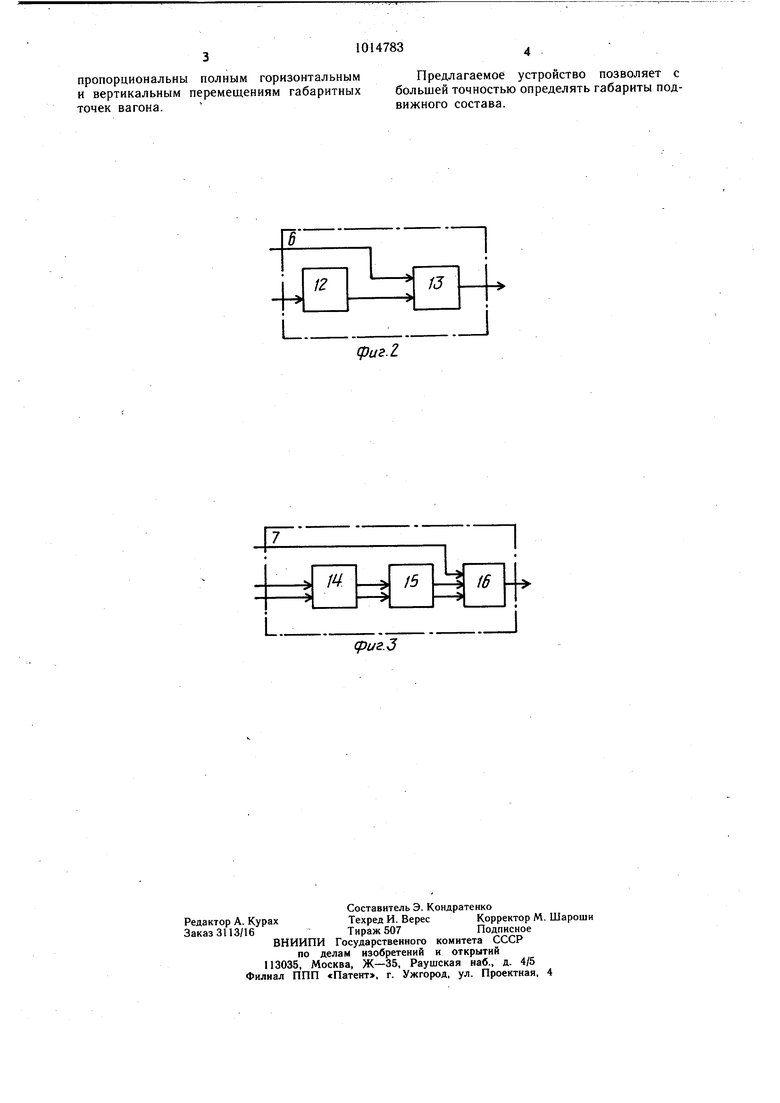
На фиг. 1 изображена блочная схема устройства; на фиг. 2 - то же, блока горизонтальной коррекции; на фиг. 3 - то же, блока вертикальной коррекции.
Устройство содержит датчик 1 горизонтальных ускорений, датчик 2 вертикальных ускорений, блоки 3-5 определения углов поворота относительно соответственно продольной, поперечной и вертикальной осей, причем выход датчика 1 горизонтальных ускорений и один выход блока 3 подключены к входам блока б коррекции горизонтальных ускорений, а другой выход блока 3, выходы блока 4 и датчика 2 подключены к входам блока 7 коррекции вертикальных ускорений, а выходы блоков 6 и 7 подключены через интегратор 8 и блок 9 масштабирования к блокам 10 и 11 определения соответственно горизонтальных и вертикальных перемещений. При этом блок 6 содержит соединенные последовательно инвертор 12 и сумматор 13, а блок 7 - элемент. 14 квадрирования, элемент 15 инвертирования и сумматор 16, включенные последовательно.
Устройство работает следующим образом.
Датчики 1, 2 и блоки 3-5 устанавливают. Например, на полу вагона на пересечении продольной и поперечной осей. Возникающие во время движения ускорения относа и подпрыгивания измеряют датчиками 1 и 2 соответственно горизонтальных и вертикальных ускорений, которые могут быть выполнены в виде акселерометров, а углы поворота кузова - блоками 3-5. Сигнал с датчика 1 подают на вход сумматора 13 блока 6, на другой вход которого через инвертор 12 поступает сигнал от датчика 2, который в инверторе умножается на ускорение силы тяжести. В результате сложения сигналов в сумматоре 13 в противофазе, на выходе блока 6 сигнал пропорционален ускорению относа. Сигнал от датчика 2 поступает на ход сумматора 16 блока 7, на два другие входа которого поступакзт сигналы от датчика 2 и блока 3 через элемент квадрирования 14 и инвертор 15, причем в усилителе инвертора сигналы умножаются на половину ускорения силы тяжести. Б результате сложения в сумматоре в противофазе на выходе блока 7 появляется сигнал, пропорциональный ускорению подпрыгивания. Далее сигналы с выходов блоков 6 и 7 дважды интегрируются в интеграторе 8, что дает сигналы, пропорциональные горизонтальным и вертикальным перемещениям, которые затем подаются в блок 9, на который поступают также сигналы от блоков 3-5 определения углов поворота. Выходные сигналы блока 9, пропорциональные относу, радиусам и углам поворота относительно продольной и вертикальной осей, вводятся в блок 10, а сигналы, пропорциональные подпрыгиванию, радиусам и углам поворота относительно поперечной и продольной осей вводятся в блок 11. На выходе блоков 10 и 11 сигналы
пропорциональны полным горизонтальным и вертикальным перемещениям габаритных точек вагона.
Предлагаемое устройство позволяет с большей точностью определять габариты подвижного состава.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОПРЕДЕЛЕНИЯ ПАРАМЕТРА, ХАРАКТЕРИЗУЮЩЕГО СОСТОЯНИЕ СИСТЕМЫ КОЛЕСО - РЕЛЬС, И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1992 |
|
RU2061610C1 |
| ИНЕРЦИАЛЬНАЯ НАВИГАЦИОННАЯ СИСТЕМА | 1991 |
|
RU2020417C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ПОДВИЖНЫХ ОБЪЕКТОВ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 1996 |
|
RU2098764C1 |
| Устройство для обучения водителей транспортных средств | 1984 |
|
SU1277172A1 |
| СПОСОБ ДИНАМИЧЕСКОГО РЕГУЛИРОВАНИЯ ПОЛОЖЕНИЯ СВЕТОВОГО ПУЧКА ФАР ТРАНСПОРТНЫХ СРЕДСТВ В ПРОЦЕССЕ ВЫПОЛНЕНИЯ ПОВОРОТОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2005 |
|
RU2314216C2 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ГАШЕНИЕМ КОЛЕБАНИЙ ТРАНСПОРТНОГО СРЕДСТВА | 2007 |
|
RU2412839C2 |
| Устройство для управления приводом передвижения грузоподъемного средства с гибкой подвеской груза | 1984 |
|
SU1204546A1 |
| Устройство для магнитного подвешивания транспортного средства | 1988 |
|
SU1710382A1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ДВИЖЕНИЕМ ТРАНСПОРТНОГО СРЕДСТВА | 2001 |
|
RU2187437C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ ПОДВИЖНЫХ НАЗЕМНЫХ ОБЪЕКТОВ | 2010 |
|
RU2436045C1 |
1. УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ПРОСТРАНСТВЕННЫХ ПЕРЕМЕЩЕНИЙ КУЗОВА РЕЛЬСОВОГО ТРАНСПОРТНОГО СРЕДСТВА, содержащее датчики соответственно горизонтальных и вертикальных ускорений, блоки измерения углов поворотов относительно продольной, поперечной и вертикальной осей кузоаа транспортного средства, блок коррекции горизонтальных ускорений, подключенный входами соответственно к датчику горизонтальных ускорений и блоку определения угла поворота относительно продольной оси кузова, а выходом- к одному входу интегратора, выходы которого через блок масштабирования подключены к входам блоков определения соответственно горизонтальных и вертикальных перемещений, отличающееся тем, что, с целью повыщения точности, оно снабжено блоком коррекции вертикальных ускорений, первый вход которого подкдючен к датчику вертикальных ускорений, а два других - к выходам соответственно блока определения угла поворота относительно продольной оси кузова и блока определения угла поворота относительно поперечной оси кузова, а выход подключен к другому входу инвертора. 2. Устройство по п. 1, отличающееся тем, что блок коррекции вертикальных ускорений снабжен элементом квадрирования, инвер тором и сумматором, выходом которого образован выход блока коррекции, одним вхо(Л дом сумматора - первый вход блока коррекции, а два других входа сумматора соединены с двумя выходами инвертора, два входа которого подключены соответственно к двум выходам элемента квадрирования, двумя входами которого образованы два других входа блока коррекции.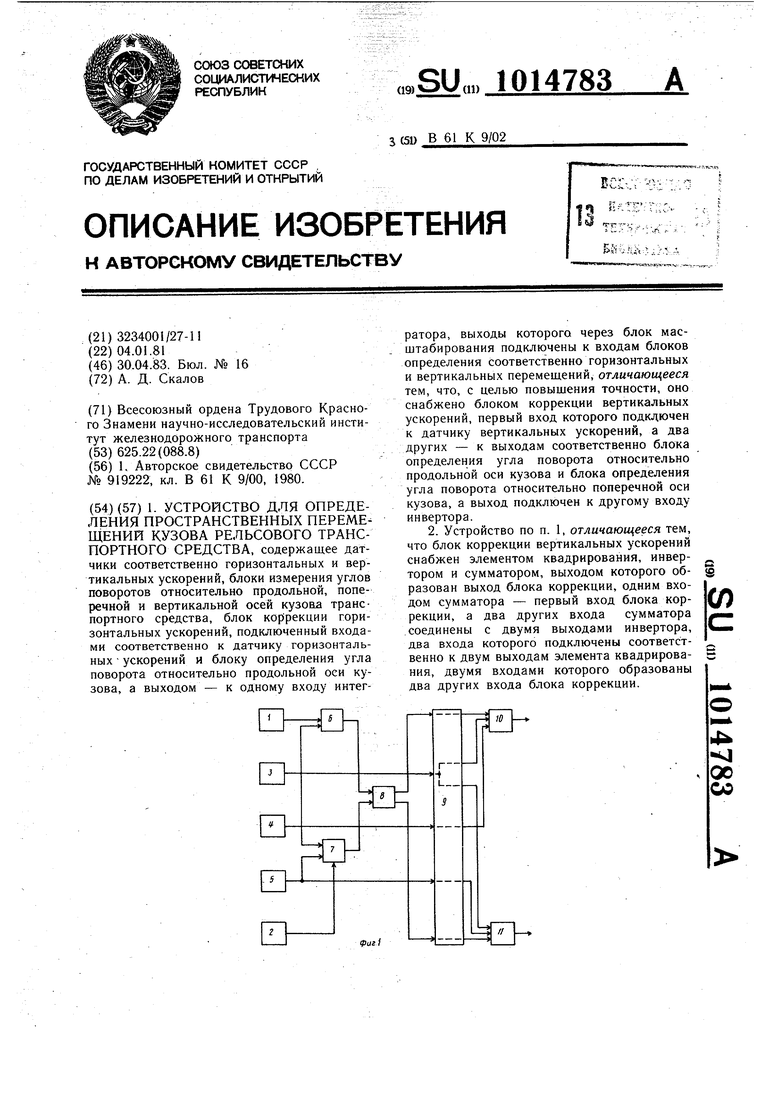
L..
.
.
фиг. 2.
f
I
сриг.З
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Устройство для сортировки каменного угля | 1921 |
|
SU61A1 |
