Изобретение относится к подъемно- транспортному оборудованию, а именно к устройствам для управления приводом передвижения грузоподъемного средства с гибкой подвеской груза.
Цель изобретения - повышение надежности устройства управления при- водом передвижения грузоподъемного средства с гибкой подвеской груза,
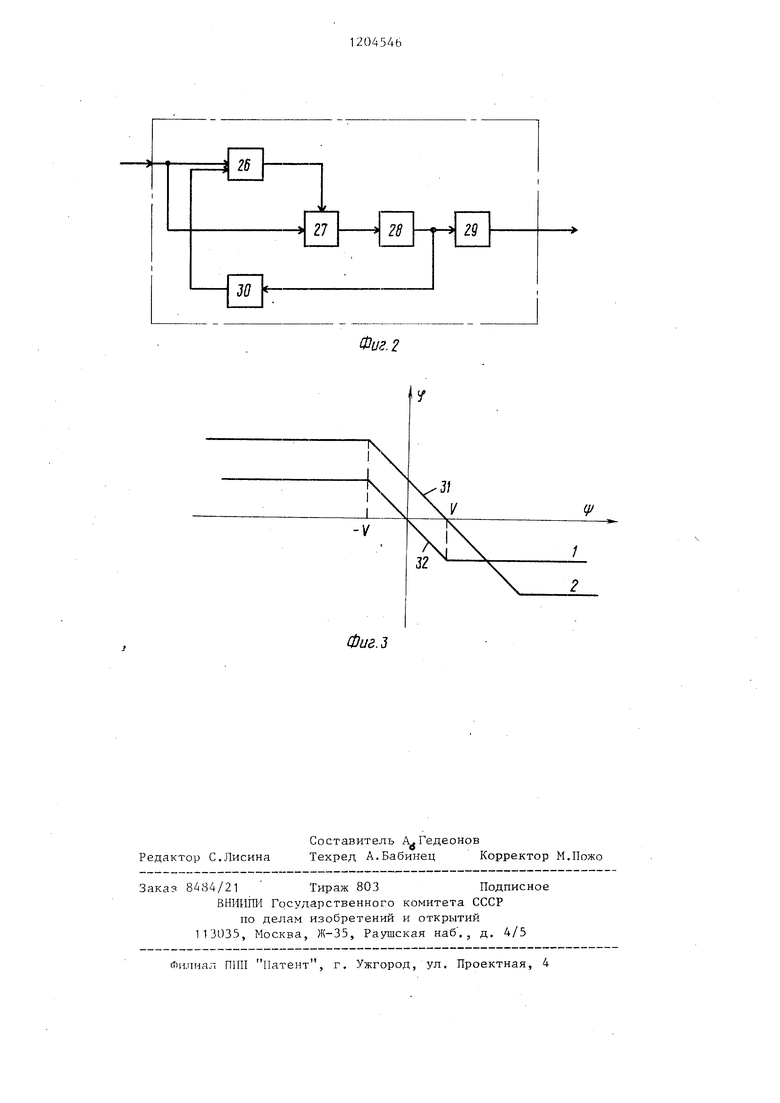
На фиг.1 изображена функдиональ- ная схема предлагаемого устройства для управления приводом передвижения грузоподъемного средства с гибкой подвеской груза , на фиг, 2 - функциональная схема привода коррекции; на фиг.З - аппроксимированные оптимальные линии переключения устройства.
Устройство для управления приводом передвижения грузоподъемного средства 1 с гибкой подвеской груза содержит датчик 2 скорости углового отклонения гибкой подвески груза, датчик 3 скорости механизма передвижения,датчик 4 длины гибкой подвески груза и датчик 5 пути грузоподъемного средства. Датчик 2 подключен к входу интегратора 6 и к первому входу сумматора 7.. Датчик 3 подключен к второму входу сумматора 7 и к первому входу блока 8 деления. Датчики 4 и 5 подключены соответственно к блоку 9 извлечения квадратного корня и к первому входу компаратора 10, выход которого через первые входы сумматора 11 и блока 12 умножения соединен с входом привода 13 коррекции. Выход блока 9 соединен с первым входом блока 14 умножения и через ин вертор 15 с первым входом блока 16 умножения. Выход блока 14 соединен с вторым входом блока 8, первый вход которого соединен через инвертор 17 с вторым входом блока 16. Выход сумматора 7 соединен с входом пропорционального уси.пителя 18 через потенциометры 19 изменения его входного сигнала, движки которых связаны с выходом блока 16 через привод 20 коррекции. Выход привода 13 кинематически связан с движками потенциометров 21 изменения выходного сигнала пропорционального усилителя 18, выход которого соединен с первым входом блока 22 сравнения. Интегратор 6 через второй, вход блока 22 связан с регулятором 23 скорости механизма 24 передвижения Г)узо- подъемного сутедг.тва 1 . ,1ходы задат04546
чика 25 соединены с вторь ми Hxo/ia fii сумматора 11, компаратора Ю и блока 14 умножения. Приводы 13 и 20 коррекции состоят из компаратора 26, 5 первый вход которого соединен с входом привода коррекции и через ключ 27 питания - с входом двигателя 28, который через редуктор 29 связан с движками потенциометров и через to блок 30 обратной связи по положению двигателя - с вторым входом компаратора 26, выход которого подключен к управляющему входу ключа 27.
Устройство для управления приво- 15 дом передвижения грузоподъемного средства с гибкой подвеской груза работ ает следующим образом.
Движение осуществляется в три этапа: разгон с гашением колебаний, движение с гашением колебаний и тор- можение с гашением колебаний. Быстродействие и возможность гашения колебаний при любых угловых отклонениях груза обеспечивается использованием аппроксимации оптимальных линий 31 и 32 переключения, изображенных на фиг.З и реализованных на базе пропорционального усилителя 18, в осях Cf - угла отклонения груза от вертикали и Ц - скорости груза, равной алгебраической сумме скорости транспортного средства V и угловой скорости отклонения груза от вертикали (f . На первом и втором этапах даижения используется линия 31, которой соответствуют начальные положения движков потенциометров 21. Сигналы с датчиков 2 и 3 используются для определения текущего значения угла отклонения груза относительно линии переключения. Эти сигналы суммируются с помощью сумматора 7 и подаются на вход усилителя 18, выходной сигнал с которого сравнивается в блоке 22 со значением текущего угла отклонения груза, получаемым от датчика 2 с помощью интегратора 6. Если сигнал интегратора 6 меньше сигнала усилителя 18, то регулятор 23 скорости включает наибольшую скорость механизма 24 передвижения, а если наоборот - наиме.ньшую. Переход к )ежиму торможения осуществляется в момент равенства сигналов с датчика 3 и с за- датчика 25 на компараторе 10. На задатчике 25 заранее выстаггляется требуемое значение момента перех да. Коррекция линии переключения происходит в соответствии с текущими значениями линейной скорости механизма передвижения и длины подвески груза, а также при переходе к режиму торможения (линия 32 фиг.З). Коррекция осуществляется путем изменения масштаба линии переключения по вертикали и сдвигом начала координат по горизонтали. Горизонтальные участки линии для этапа разгона соответствуют значению
(1)
где L - длина подвески груза;
а - ускорение свободного падео
НИН. .
Аналогичные участки для этапа торможения соответствуют значению
(2)
Коррекция по вертикали осуществляется согласно указанным соотношениям. С помощью сумматора 11 и выхода задатчика 25 с единичным сигналом формируется значение коэффициента, которое поступает на первый вход блока 12 умножения, на второй нход которого подается сигнал от ;т,атчика 3, отнесенный к значению L а посредством блока 8 деления, блока 9 извлечения квадратного корня и блока 14 умножения, на который
)/2
от задатчика поступает значение О
В результате на выходе блока 12
в каждый момент времени формируется
10
15
2U434b
сигнал, соответствующий горизонтальным участкам линии переключения. Указанный сигнал поступает на первый вход компаратора 26 привода 13 г коррекции и через ключ 27 включает двигатель 28, который через соответственно подобранный редуктор 29 перемещает движки потенциометров 21. .Остановка двигателя 28 происходит по команде с компаратора 26, которая идет на управляющий вход ключа 27,- после того как сигнал на втором входе компаратора 26, поступающий с блока 30, достигает значения сигнала на его первом входе. В случае дальнейшего изменения сигнала на выходе блока 12 снова происходит включение двигателя 28 в соответствующем направлении с дальнейшей от- 2Q работкой величины корректирующего сигнала. При переходе к этапу торможения сигнал с компаратора 10 инвертируется в блоке 15 и поступает на первый вход блока 16 умножения, на втором входе которого постоянно находится сигнал с датчика 3, инвертированный в блоке 17. Таким образом, по сигналу с блока 17 на привод 20 коррекции поступает сигнал, равный значению необходимого сдвига линии переключения по горизонтали. Отработка сигнала производится по схеме, аналогичной приводу 13 коррекции по вертикали, при этом кинематический выход привода 20 свя- зан с движком потенциометра 19. Все корректирующие каналы могут работать независимо друг от друга и одновременно, что обеспечивает гибкость и быстродействие работы устройства управления в целом.
25
30
40
Фиг.1
4
26
-
29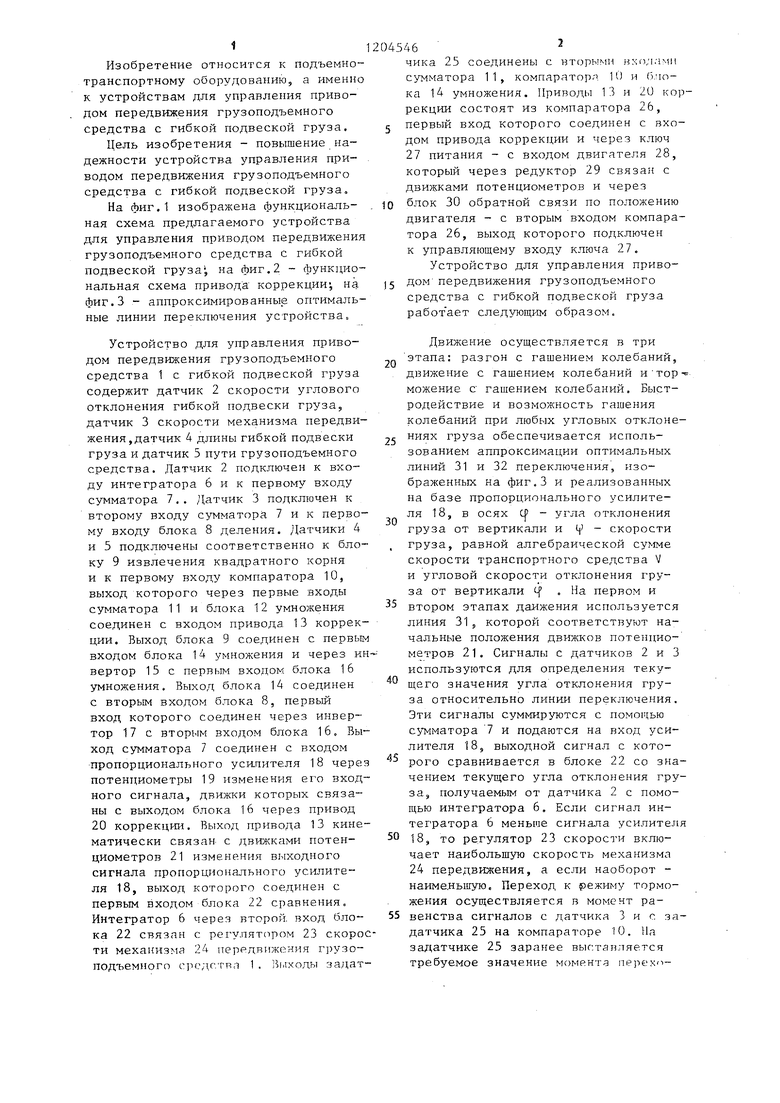

J/
(f
-V
J2
Составитель A Гедеонов Редактор С.Лисина Техред А.Бабинец Корректор М.Пожо
Заказ 8484/21 Тираж 803Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб ., д. 4/5
(Г нлиал П1Ш Патент, г, Ужгород, ул. Проектная, 4
Фиг.З
| Устройство для управления торможением механизма передвижения грузоподъемного средства с гибкой подвеской груза | 1983 |
|
SU1129174A1 |
| Приспособление для соединения пучка кисти с трубкою или втулкою, служащей для прикрепления ручки | 1915 |
|
SU66A1 |
