Изобретение относится к транспорту на магнитной подвеске.
Цель изобретения - повышение точности поперечной стабилизации и надежности..
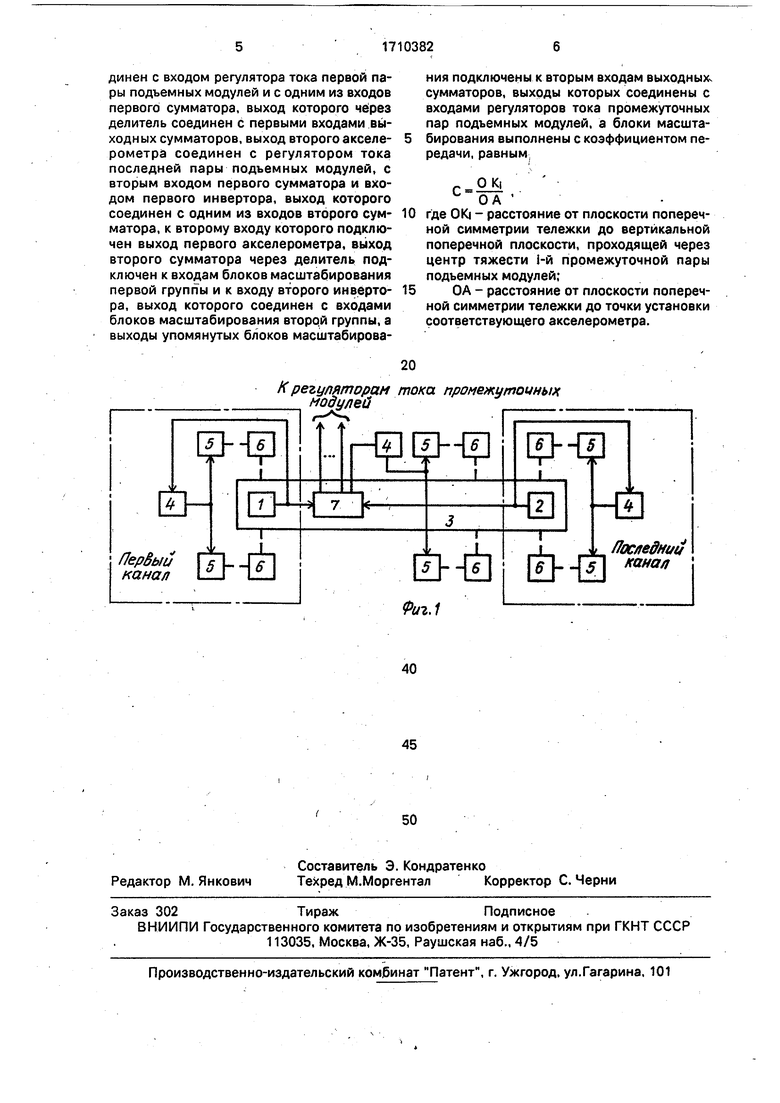
На фиг.1 представлена структурная схема устройства; на фиг.2 - функциональная схема вычислителя ускорения.
Устройство содержит акселерометры 1 и 2, закрепленные на продольной оси тележки 3 на уровне пары подъемных модулей и связанные с регулятором 4 тока, соединенным с обмотками 5 поперечной стабилизации модулей б канала стабилизации, причем акселерометры 1 и 2 подключены к вычислителю 7 ускорений, который содержит сумматор 8, соединенный соответственно с делителем 9 и сумматором 10, инвертор 11, делитель 12, соединенный с инвертором 13, блоки 14-17 масштабирования и связанные с выходами последних сумматоры 18-21.
Устройство работает следующим образом.
Сигнал от акселерометра 1 поступает на регулятор 4, который обеспечивает ток необходимой величины в обмотках 5. Управляющий сигнал формируется так же, как сигнал обратной связи по ускорению той части тележки 3, под которой расположены пары подъемных модулей, причем ускорения вычисляются с помощью сигналов от акселерометров 1 и 2, установленных на продольной оси симметрии тележки на уровне первой и последней пар модулей. Сигналы с акселерометров 1 и 2 поступают на сумматор 8, а затем в делителе 9 сумма сигналовделится пополам (на два) и этот сигнал равен ускорению поступательного перемещения тележки в горизонтальной плоскости (ускорению поперечных перемещений тележки). Сигнал с сумматора 10 поступает на инвертор 11, куда подается и сигнал с первого акселерометра 1, а затем сигнал с инвертора 11 поступает на делитель 12, с выхода которого получают полуразность сигналов акселерометров 1 и 2, которая равна вращательному ускорению тележки на уровне первой пары модулей вокруг вертикальной оси симметрии, проходящей через центр тяжести тележки, т.е. ускорению точек, расположенных по разные стороны от плоскости поперечной симметрии тележки. Эти ускорения точек тележки, расположенных по разные стороны от плоскости поперечной симметрии тележки, имеют парные знаки. Поэтому сигнал с выхода делителя 12 подается на входы блоков 14 и 15 масштабирования непосредственно, а на входы блоков 16 и 17 через инвертор 13.
Коэффициенты передачи Ci указанных блоков 14-17 масштабирования определяются соотношением
Г, - ° i - 1 N-2
ОА У
где OKj - расстояние от плоскости поперечной симметрии тележки до вертикальной
плоскости, проходящей через центр тяжести i-й промежуточной пары подъемных модулей;
ОА - расстояние от плоскости поперечной симметрии тележки до точки установки
акселерометра 1 или 2;
N - число пар подъемных модулей, установленных на транспортном средстве.
Сигналы с блоков 14-17 масштабирования подаются на выходы сумматоров 18-21,
на вторые входы которых подается сигнал с делителя 9.
Выходные сигналы сумматоров 18-21 пропорциональны полным ускорениям соответствующих точек в горизонтальной плоскости и подаются .на соответствующие регуляторы 4 тока.
Число блоков масштабирования и выходных сумматоров определяется числом промежуточных пар подъемных модулей. На
фиг. 2 представлена структурная схема для случая, когда промежуточных пар подъемных модулей четыре.
Если устройство для магнитного подвешивания построено как активный демпфер
колебаний в горизонтальной плоскости, то регудяторы 4 тока модулей 6 реализуют.например, пропорционально-интегральный закон управления. Если указанное устройство построено как регулятор бокового зазора, то регуляторы тока реализуют закон управления относительно полного значения ускорения в соответствующих точках тележки в горизонтальной плоскости.
Ф о р м у л а и 3 о б р е т е н и.я
Устройство для магнитного подвешивания транЪпортного средства, содержащее закрепленные на тележке попарно по обе стороны от продольной оси транспортного
средства вдоль него подъемные модули, обмотки поперечной стабилизации которых соединены с регуляторами тока, акселерометры, установленные на тележке, сумматоры и делители, отличающееся тем, что,
с целью повышения точности поперечной стабилизации и надежности, оно снабжено двумя группами блоков масштабирования, инверторами и-выходными сумматорами, причем выход первого акселерометра соединен с входом регулятора тока первой пары подъемных модулей и с одним из входов первого сумматора, выход которого через делитель соединен с первыми входами выходных сумматоров, выход второго акселерометра соединен с регулятором тока последней пары подъемных модулей, с вторым входом первого сумматора и входом первого инвертора, выход которого соединен с одним из входов второго сумматора, к второму входу которого подключен выход первого акселерометра, выход второго сумматора через делитель подключен к входам блоков масштабирования первой группы и к входу второго инвертора, выход которого соединен с входами блоков масштабирования второ.й группы, а выходы упомянутых блоков масштабирования подключены к вторым входам выходных сумматоров, выходы которых соединены с входами регуляторов тока промежуточных пар подъемных модулей, а блоки масштабирования выполнены с коэффициентом передачи, равным,
,, ОК|
0
где ОК| - расстояние от плоскости поперечной симметрии тележки до вертикальной поперечной плоскости, проходящей через центр тяжести 1-й промежуточной пары подъемных модулей,
5
О А - расстояние от плоскости поперечной симметрии тележки до точки установки соответствующего акселерометра.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ФОРМИРОВАНИЯ СИГНАЛОВ УПРАВЛЕНИЯ СИММЕТРИЧНОЙ РАКЕТОЙ | 2007 |
|
RU2374602C2 |
| УСТРОЙСТВО МОДУЛЯ ДИСТАНЦИОННОГО МОНИТОРИНГА ВЫСОКОВОЛЬТНЫХ ЛИНИЙ ЭЛЕКТРОПЕРЕДАЧ | 2021 |
|
RU2762065C1 |
| Устройство для измерения ускорения | 2023 |
|
RU2808728C1 |
| Электропривод с векторным управлением | 1987 |
|
SU1443112A1 |
| ОДНОГИРОСКОПНЫЙ КОРРЕКТИРУЕМЫЙ ГИРОКОМПАС (ВАРИАНТЫ) | 2000 |
|
RU2169349C1 |
| Устройство для автоматического управления процессом тепловой обработки гипсового сырья в варочных котлах | 1983 |
|
SU1130547A1 |
| СПОСОБ РАСПОЗНАВАНИЯ ЦЕЛИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2011 |
|
RU2478898C1 |
| Частотно-регулируемый синхронный электропривод | 1983 |
|
SU1107242A1 |
| СТЕНД ДЛЯ КОНТРОЛЯ ИЗМЕРИТЕЛЕЙ УГЛОВЫХ СКОРОСТЕЙ | 1995 |
|
RU2115128C1 |
| СИСТЕМА УПРАВЛЕНИЯ БЕСПИЛОТНЫМ ЛЕТАТЕЛЬНЫМ АППАРАТОМ | 2002 |
|
RU2212702C1 |
Изобретение относится к транспорту на магнитной подвеске. Цель изобретения - повышение точности поперечной стабилизации и надежности. Сигналы акселерометров 1 и 2, установленных на продольной оси тележки на уровне пары подъемных модулей, подключены к вычислителю ускорений, в котором имеются сумматоры 8 и 10, делители 9 и 12, инверторы 11 и 13, блоки 14-17 масштабирования и выходные сумматоры 18-21, на выходе которых получается сигнал управления по ускорению, получаемому суммированием и делением сигналов акселерометров 1, 2. 2 ил.К регуляторе^ тока последней nap^i подъемных MC^L:--:::^Фиг. 2ОСА) 00ю^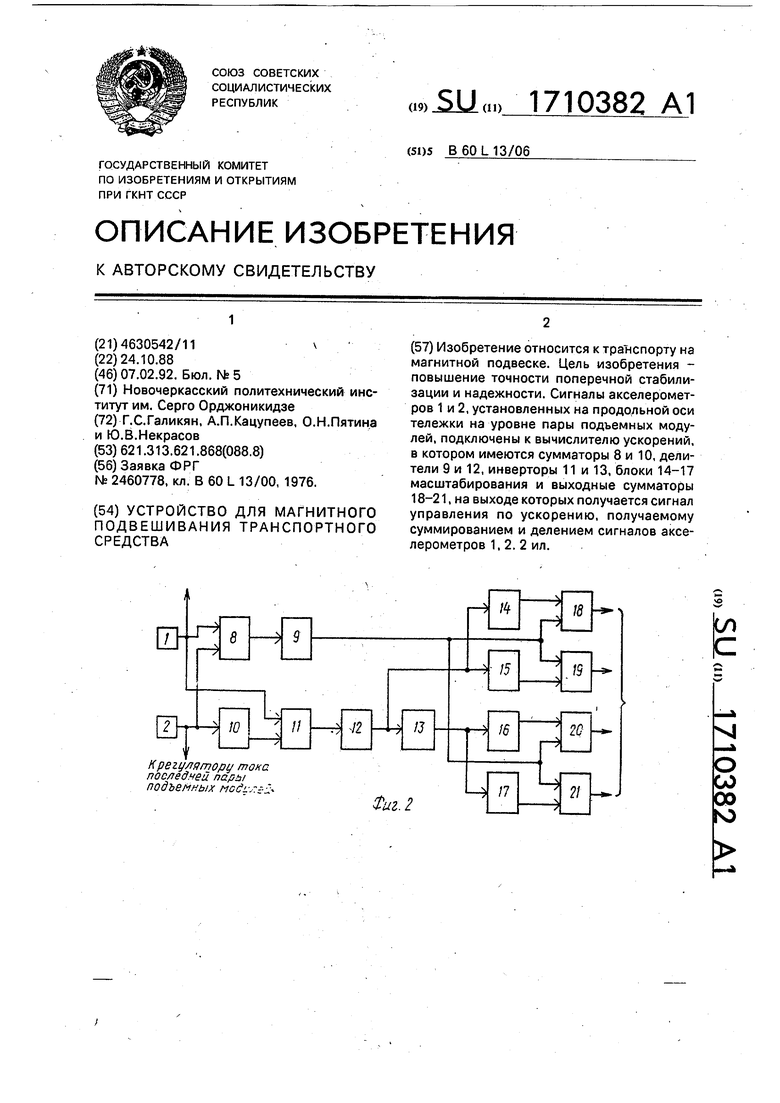
К регуляторам тока модулей промежуточны)
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
| кл | |||
| Способ получения молочной кислоты | 1922 |
|
SU60A1 |
