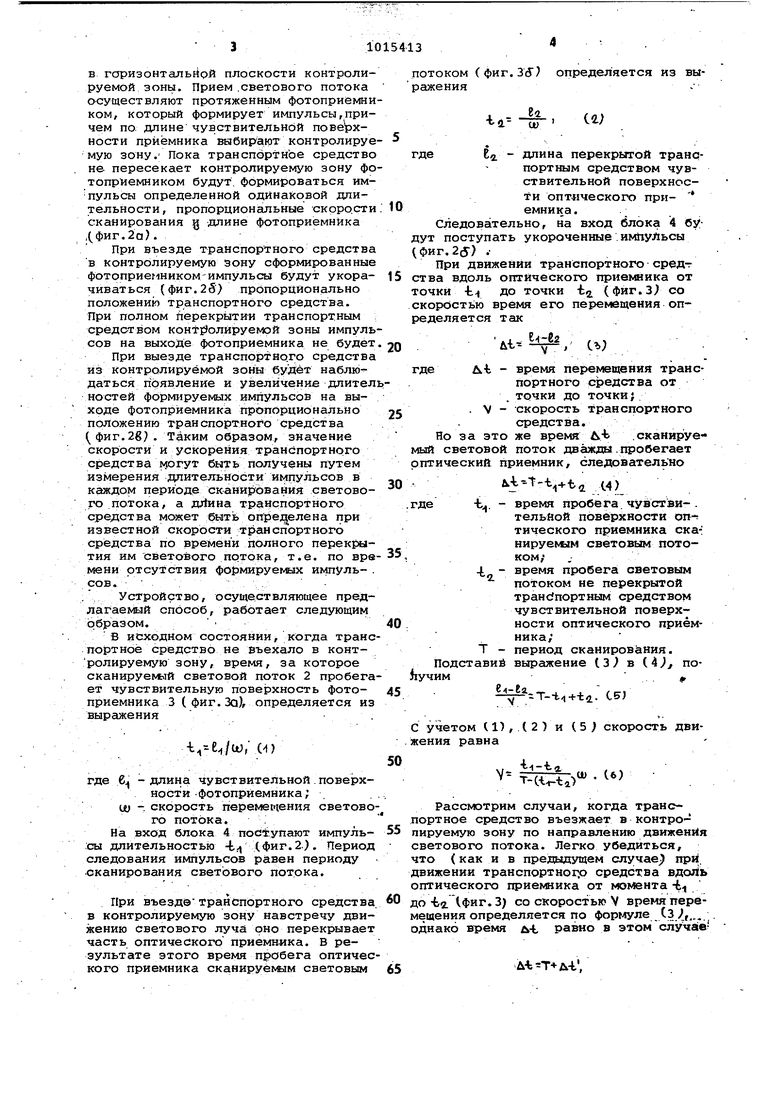
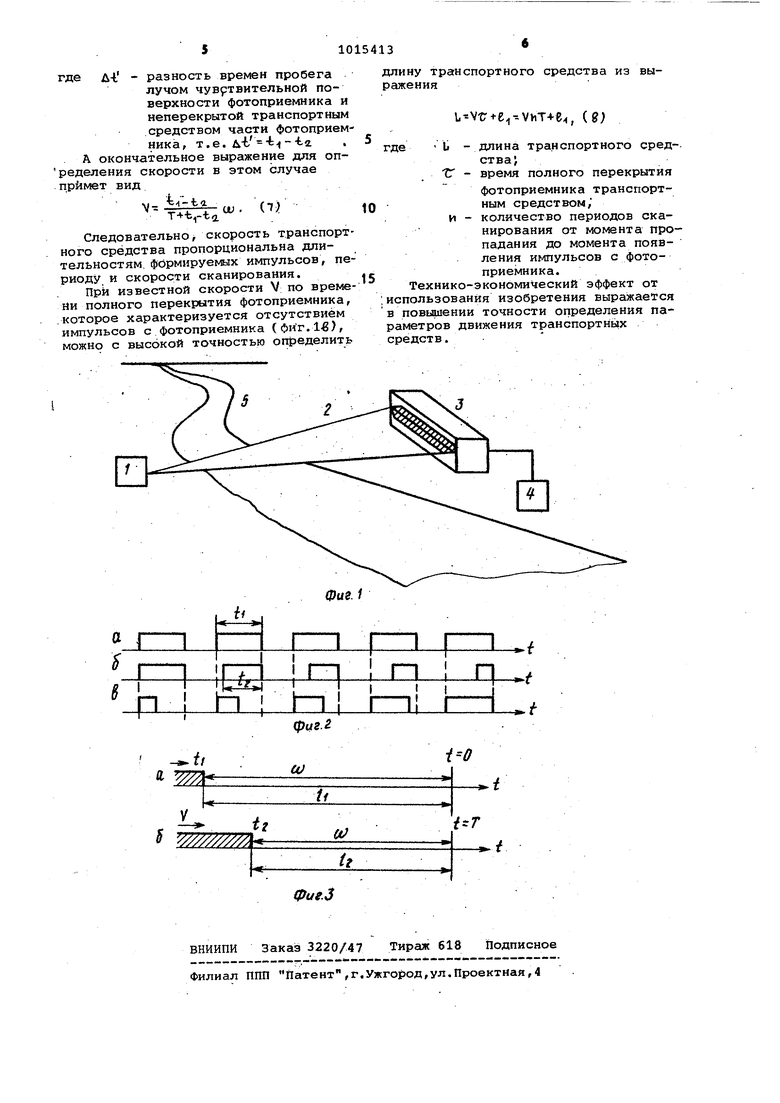
Изобретение относится к автотранспортной технике, а именно к организации и безопасности движения, и может быть использовано для определения характеристик режимов движения транспортных потоков, например, при реализации систем регулирования движения. Известен способ измерения скорости и длиньл транспортного средства ,согласно которому измеряют время изменения не светового потока,а магнитного поля зем.ли при пересечении транспортным средст вом границ контролируемой зоны 1. .Наиболее близким к предлагаемому является способ измерения параметров движения и длины транспортного средства, основанный на создании направленного светового потока, пересекающего траекторию движения транспортного средства, и регистрации парамет.ров этого потока, в котором измеряют время изменения интенсивности светового потока при въезде и выезде транспортного средства из контролируемой зоны и время полного перекрытия потока С 2}. Недостатком известного способа является низкая точность из-за наличия операции аналогового дифференцирования фронтов формируемых импульсов при вычислении скорости и ускорения транспортного средства. Крометого, на определение скорости транспортного средства оказывает йлиянйе форма фронтов формируемых импульсов, образованных перекрытием светового потока разли 1ной конфигурацией теневого профиля транспортнбго средства. И, наконец, по этому способу невозможно определить направление движения транспортного средства, Цель изобретения - повышение точности измерения скорости движения и длины транспортного средства. Поставленная цель достигается тем что согласно способу измерения скорости движения и длины транспортного средства путем формирования в контролируемой зоне направленного светового потока, пересекающего траекторию движения транспортного средства, определения времени нахождения транс порта средства в контролируемой зоне и определения длины транспортного средства по значению скорости движения транспортного средства и времени полного перекрытия контролируемой зоны транспортным средством, светово поток периодически реремещают в гори зонтальной плоскости в пределах конт ролируемой зоны с постоянной скороетью, определяют время оснащения тран спортного средства при въезде в конт ролируемую зону в течение двух следу Ющйх друг за другом перемещений све тового потока, oпpeдeляJoт разность этих времен, вычисляют скорость днижения транспортного средства по формулепри совпадении направления движения транспортного средства и перемещения светового потока и по формуле при несовпадении направления движения транспортного средства с направлением перемещения светового потока, где - скорость движения транспортного средства; Ш - скорость перемещения светового потока; Т - период повторения перемещения светового потока, Д-t- разность времен освещения транспортного средства в течение двух следующих друг за йругом перемеще.; НИИ светового потока, определяют длину транспортного средства по формуле , где Ь - длина транспортного средства j V скорость движения транспортного средства; Г - время полного перекрытия контролируемой зоны транспортным средством, - В - длина контролируемой зоны. На фиг.1 изображено устройство, осуществляющее предлагаемый способ/ , на фиг.2 - импульсы на выходе фотот приемНика; на фиг.З - диаграмма, поясняющая работу устройства. Устройство фиг.1) содержит блок 1 развертки светового луча 2, протяженный фотоприег иик 3 и блок 4 вычисления параметров движения транспортного средства, В заданном сечении автомагистрали 5 на определенном уровне над дорожным полотном,в горизонтальном направлении создается сканируемый световой поток 2. Сканирование светового потока осуществляется с помощью блока 1 развертки, выполненного, например, в виде вращающегося зеркального призменного барабана, на который падает луч оптического квантового генератора. На противоположной стороне дорожного полотна устанавливается протяженный фотоприемник 3. ёыход фотоприемника связан с входом блока 4 вычисления параметров движения транспортного ср.едства. Способ -осуществляется следующим образом. Остронаправленный световой поток Сдиаметр потока выбирают меньше -раз.меров мелких деталей теневого профиля транспортного средства) сканируют в горизонтальйрй плоскости контролируемой зоны. Прием .светового потока о-существляют протяженным фотоприемником, который формирует импульсы,причем по. длине чувствительнсэй поверхности приёмника выбирают контролируе- 5 мую зону. Пока транспортное средство не пересекает контролируемую зону фотоприемником будут, формироваться им пульсы определенной одинаковой длительности, пропорциональные скорости. Ю сканирования g длине фотоприемнйка ,(фиг,2а). При въезде транспортного средства в контролируемую зону сформированные фотоприепником-импульсы будут укора- 15 чиваться (фиг.25) пропорционально положению транспортного средства. При полном перекрытии транспортным средством контЕ олйруемой зоны импульсов на выходе фотоприемника не будет. 20 При выезде транспортно.го средства из контролируемой зоны будет наблюдаться проявление и увеличение длительностей формируемых импульсов на выходе фотоприемнйка пропорционально os положению транспортного средства ( фиг. 28} . Тйким образом, значение скорости и ускорения транспортного средства NioryT быть получены путем измерения длительности импульсов в каждом периоде сканировайия светового.потока, а дЛина транспортного средства может опре;|елена при известной скорости транспортного средства по времени полного перекрытия им светового потока, т.е. по врв- 35 мени отсутствия фо{эмируе1«5э1Х импуль- . сов. . . . . Устройство, осуществляющее предлагаемый способ, работает следующим образом. 40 В исходном состоянии, когда транспортное средство не въехало в контролируемую зону, время, за которое сканируемой световой поток 2 пробегает чувствительную поверхность фото- 45 приемника 3 ( фиг. За), определяется из выражения (-1) где 6 -длина чувствительной .поверхности-фотопрйемника;Ш -. скорость перемещения светового потока, . На вход блока 4 поступают импуль- 55 сы длительностью -Ь.ХФиг.2.). Период следования импульсов равен периоду сканирования светового потока. При въезд©транспортного средства. 0 в контролируемую зону навстречу движению светового луча оно перекрывает часть оптического приемника. В результате этого время пробега оптического приемника сканируегллм световым 65 по ра ду (ф ст то ск ре гд мы оп 1у С же по ли св чт дв оп до ме од оком (фиг.Зб определяется из выения-С. - длина перекрытой транспортным средством чувствительной поверхности оптического при- емника. Следовательно, на вход блока 4 бупоступать укороченные и йгyльcы г,25) .При движении транспортного ереДт а вдоль оптического приемника от ки -ti до точки ta (фиг.ЗЛ со ростью время его перемещения опеляется так it- V CV uit - время перемещения транспортного средства от точки до точки; . V - скорость транспортного средства. Но за это же время -Ь .сканируесветовой поток дважды.пробегает ический приемник, следовательно u.-t--t-t 4.tj, 14) fc. - время пробега, чу в стаи-. тельйой поверхности оптического приемника ска-: нируемым световым потоком/ . -t - время пробега световым потоком не перекрытой транс;портным средством чувствительной поверхности оптического приёмника;Т - период сканирования. Подставив выражение (3 в (4 поим . -Т-i +tij. (,5) четом (1),(2)и (5) скорость двиия равна V- iirka UJ , (6) T-t-t ta) Рассмотрим случаи, когда транстное средство въезжает в контроуемую зону по направлению движения тового потока. Легко убедиться, {как и в предыдущем случае при. жении транспортногр средства вдоЛь ического приемника от момента tk i Чфиг. 3) со скоростью V время переения определяется по формуле (зу,,., ако время д-Ь равно в этом случаеД : Т+А-1,
де д-t - разность времен пробега лучом чувствительной поверхности фотоприемника и неперекрытой транспортным средством части фотоприемника, т.е. . А окончательное выражение для опеделения скорости в этом случае римет вид
V-S ,,. г-,)
Следовательно, скорость транспортного средства пропорциональна длительностям, формируемых импульсов, периоду и скорости сканирования.
При известной скорости V по времени полного перекрытия фотоприемника, которое характеризуется отсутствием импульсов с фотоприемника (фиг.1в), можно с высокой точностью определить
длину транспортного средства из выражения
LVtr -e-,--vviT- -C4, (g;
длина тра.нспортного средЬ ства J время полного перекрытия
Т фотоприемника транспортным средством, количество периодов скаи нирования от момента пропадания до момента появления ш/шульсов с фотоприемника.
Технико-экономический эффект от использования изобретения выражается в повышении точности определения параметров движения транспортных средств.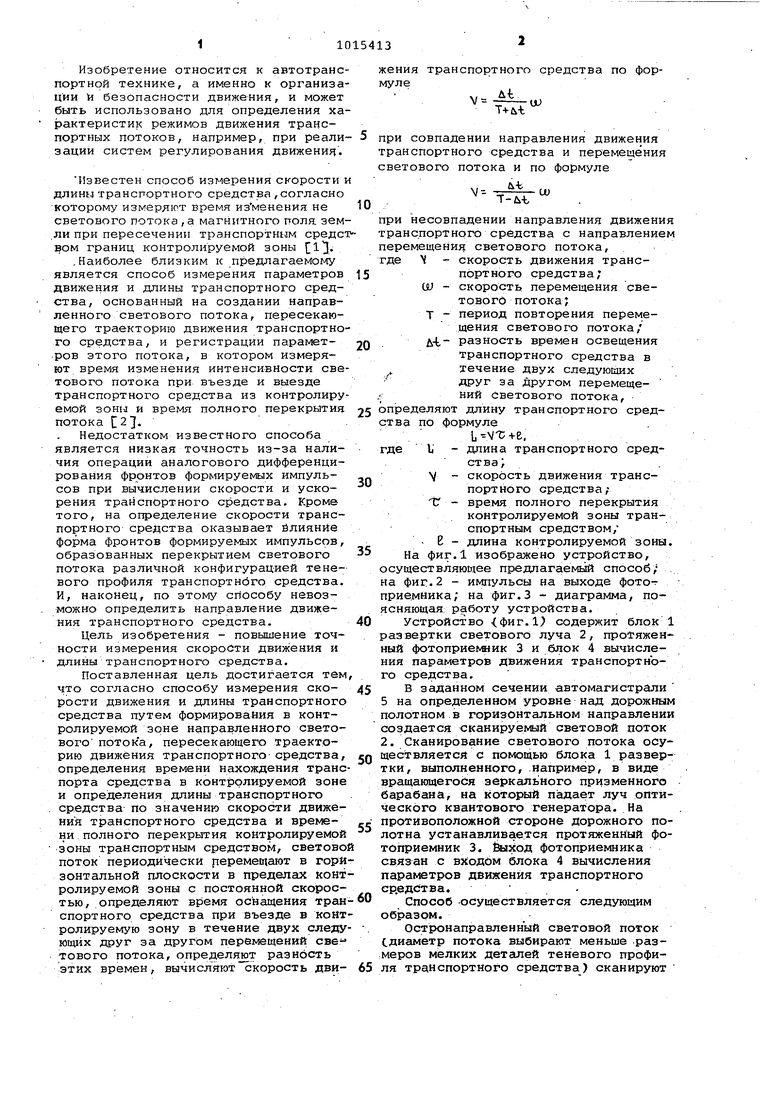
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ измерения скорости движения и длины транспортного средства | 1982 |
|
SU1160460A2 |
| Способ измерения скорости движения и длины транспортных средств | 1988 |
|
SU1649587A1 |
| Способ измерения скорости движения и длины транспортного средства | 1985 |
|
SU1280427A1 |
| Способ измерения параметров движения и длины транспортного средства | 1976 |
|
SU634349A1 |
| ФАРА (ВАРИАНТЫ) И СПОСОБ ОСВЕЩЕНИЯ ДОРОГИ | 2010 |
|
RU2446963C1 |
| СПОСОБ УСКОРЕНИЯ ИОНОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2007 |
|
RU2364979C1 |
| Фотометрический способ измерения диаметра детали | 1986 |
|
SU1420359A1 |
| Способ определения скоростей частиц | 1990 |
|
SU1770911A1 |
| СПОСОБ РЕГИСТРАЦИИ ДВИЖУЩИХСЯ ОБЪЕКТОВ | 2008 |
|
RU2400771C1 |
| Фотоэлектрическое измерительное устройство | 1988 |
|
SU1677520A1 |
СПОСОБ ИЗМЕРЕНИЯ СКОРОСТИ ДВИЖЕНИЯ И ДЛИНЫ ТРАНСПОРТНОГО СРЕДСТВА- -путем формирования в контролируемой зоне направленного светового потока, пересекающего траекторию движения транспортного сдедства, определения времени нахождения транспортного средства в контролируемой зоне и определения длины транспортного средства по значению, скорости движения транспортного средства и времени полного перекрытия контролируемой зоны транспортным средством, о т л и чающий с я тем, что, с целью повышения точности измерения скорости движения и длины транспортного средства, световой поток периодически перемещают в горизонтальной плоскости в пределах контролируемой зоны с постоянной скоростью, Ьпределяют время освещения транспортного средства при въезде в контролируемую зону в течение двух следующих друг за другом перемещений светового потока, определяют разность этих времен, вычисляют скорость движения транспортного средства по формуле совпадении направления движения транспортного средства и перемеь ения светового потока и по формуле fi-t. V си Т-At При несовпадении направления.движения транспортного средства с направлением -перемещения светового потока, где V - скорость движения транспортного средства; Ш - скорость-перемейтения свето(П вого потока; : Т - период повторения перемещения светового потока; . д-Ь разность времен освещения транспортного чзредства в чение двух спедую1 дах друг за другом перемещений светового потока, определяют длину транспортного средства по формуле , СП Ь длина транспортного средгде ства; 4 V скорость движения транспор тного средства; время полного перекрытия t 00 контроли уемой зоны транспортным средством г В - длина контролируемой зоны. 
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Способ обнаружения транспортного средства и определения его скорости и типа | 1976 |
|
SU591905A1 |
| Топка с несколькими решетками для твердого топлива | 1918 |
|
SU8A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Способ измерения параметров движения и длины транспортного средства | 1976 |
|
SU634349A1 |
| Топка с несколькими решетками для твердого топлива | 1918 |
|
SU8A1 |
