Изобретение относится к способам контроля движения транспорта и может быть использовано для определения таких характеристик транспортных потоков, как скорость и состав.
Цель изобретения - расширение функциональных возможностей путем определения скорости движения и длины транспортных средств (ТС) в условиях многорядного движения.
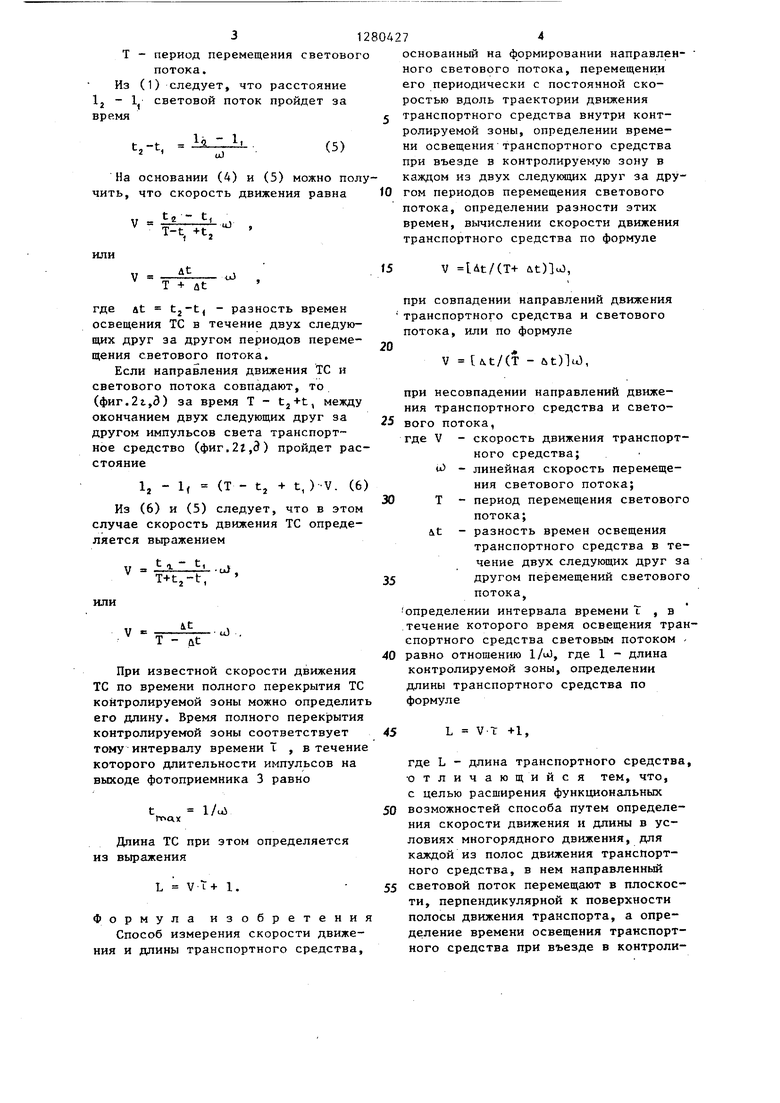
На фиг. 1 изображено устройство, реализующее предлагаемый способ на одной из полос движения ТС многорядной автомагистрали; на фиг. 2 - временные диаграммы, поясняющие работу устройства, реализующего предлагаемый способ.
Устройство содержит блок 1 разверки светового луча 2, фотоприемник 3, блок вычисления параметров движе- НИН ТС.
Сущность предлагаемого способа заключается в следукяцем.
Остронаправленный световой поток помещают с постоянной скоростью в вертикальной плоскости над контролируемой зоной вдоль траектории движения ТС. Длина контролируемой зоны определяется сектором сканирования светового луча, причем она меньще ми нимальной из возможных длин ТС. При ем отраженного светового потока от поверхности автомобилей осуществляют фотоприемником, который формирует на своем выходе электрические импуль сы. Пока ТС не въехало в контролируемую зону, на выходе фотоприемника не будет импульсов в виду диффузного отражения асфальта.
При въезде ТС в контролируемую зону световой поток, отражаясь от его поверхности, поступает на вход фотоприемника и сформированные фотоприемником импульсы удлиняются (фиг.2л) пропорционально положению транспорт- ного средства в контролируемой зоне. При полном перекрытии транспортным средством контролируемой зоны длительность импульсов на выходе фото- приемника будет пропорциональна ее длине (фиг.28).
При выезде транспортного средства из контролируемой зоны наблюдает- ся укорочение длительностей формируемых импульсов на выходе фотоприемника пропорционально положению транспортного средства (фиг.2Б).
Таким образом, значение скорости ТС может быть получено путем измерения изменения длительности импульсов в каждом периоде сканирования светового потока, а длина ТС может быть определена при известной скорости транспортного средства по времени полного перекрытия им контролируемой зоны, т.е. по времени, в течение которого длительность отраженных импульсов будет максимальной и равной отнощению 1Лл), где 1 - длина контролируемой зоны, о)- скорость перемещения светового потока.
Устройство, реализующее предлагаемый способ, работает следующим образом.
Световой поток 2 пробегает контролируемую зону за время 1
t 5
(1)
определяемое блоком 1 развертки светового луча.
Ввиду диффузного отражения асфальта уровень фонового сигнала, т.е. сигнала, отраженного от асфальтного дорожного полотна, будет значительно ниже уровня зеркально отраженного от поверхности автомобиля сигнала, н который настроен фотоприемник 3. Поэтому на выходе фотоприемника импульсов не .будет.
При въезде транспортного средства в контролируемую зону, навстречу движению светового луча, световой луч отражается от части въехавшего в контролируемую зону транспортного средства и фиксируется фотоприемником 3 в течение времени. 1,
t,
(2)
где 1, - длина перекрытой транспортным средством части контролируемой зоны.
В следующем периоде перемещения светового потока ТС будет освещено в течение.времени
t, , (3)
где - длина перекрытой ТС части контролируемой зоны.
За время между окончанием двух следукшщх друг за другом импульсов
света, равное
t2 t + Т (фиг.2г,Э),
транспортное средство перемещается на расстояние (фиг. 2г,3)
,-, (t,-t, + T)V,
(4)
где V - скорость ТС;
Т - период перемещения светового
потока.
Из (1) следует, что расстояние Ij - 1 световой поток пройдет за время
t.-t,
s. 1|
и)
(5)
На основании (4) и чить, что скорость дв
г - -g ) ,
V - :-:-uJ
ИЛИ
V
T-t, .Ц - At
Т + at
uj
где at tj-t( - разность времен освещения ТС в течение двух следующих друг за другом периодов перемещения светового потока.
Если направления движения ТС и светового потока совпадают, то (фиг.21,Э) за время Т - tj+t, между окончанием двух следующих друг за другом импульсов света транспортное средство (фиг.2г,Э) пройдет расстояние
Ij - 1, (Т - t, + t, ) -V. (6)
Из (6) и (5) следует, что в этом случае скорость движения ТС определяется вьфажением
tiL- t,
,
u
или
it т - ut
u3 ,
при известной скорости движения ТС по времени полного перекрытия ТС контролируемой зоны можно определить его длину. Время полного перекрытия контролируемой зоны соответствует тому интервалу времени Т , в течение которого длительности импульсов на выходе фотоприемника 3 равно
t 1/ui max
Дпина ТС при этом определяется из выражения
L V t+ 1.
Формула изобретения
Способ измерения скорости движения и длины транспортного средства.
основанный на формировании направленного светового потока, перемещении его периодически с постоянной скоростью вдоль траектории движения
транспортного средства внутри контролируемой зоны, определении времени освещения транспортного средства при въезде в контролируемую зону в каж;;ом из двух следукнцих друг за другом периодов перемещения светового потока, определении разности этих времен, вычислении скорости движения транспортного средства по формуле
V Ut/(T+ лt)0,
при совпадении направлений движения транспортного средства н светового потока, или по формуле
V i:u.t/(T - ut)liJ,
при несовпадении направлений движения транспортного средства и свето- вого потока,
где V - скорость движения транспортного средства;
( - линейная скорость перемещения светового потока; Т - период перемещения светового
потока; it - разность времен освещения
транспортного средства в течение двух следующих друг за другом перемещений светового потока,
определении интервала времени Т , в течение которого время освещения транспортного средства световым потоком - равно отношению 1/иЗ, где 1 - длина контролируемой зоны, определении длины транспортного средства по формуле
45
V-t +1,
где L - длина транспортного средства, отличающийся тем, что, с целью расширения функциональных
возможностей способа путем определения скорости движения и длины в условиях многорядного движения, для каждой из полос движения транспортного средства, в нем направленный
световой поток перемещают в плоскости, перпендикулярной к поверхности полосы движения транспорта, а определение времени освещения транспортного средства при въезде в контроляному от транспортного средства над
ному световому потоку.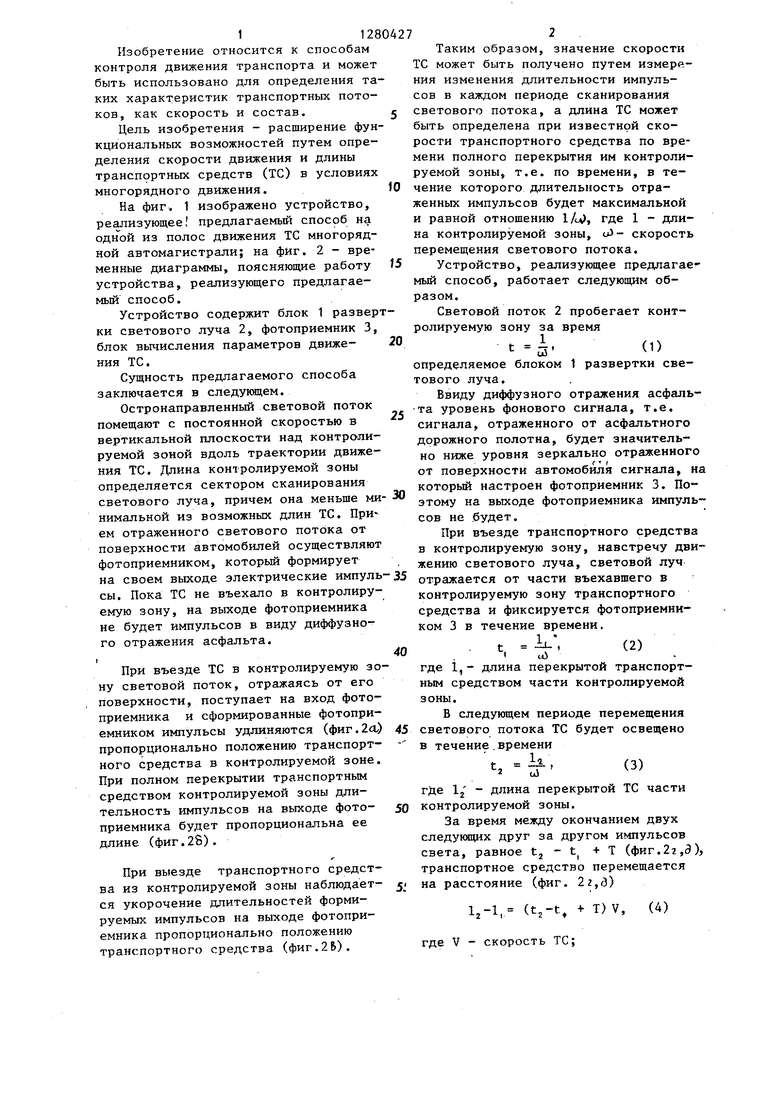
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ измерения скорости движения и длины транспортных средств | 1988 |
|
SU1649587A1 |
| Способ измерения скорости движения и длины транспортного средства | 1981 |
|
SU1015413A1 |
| Способ измерения скорости движения и длины транспортного средства | 1982 |
|
SU1160460A2 |
| Способ измерения параметров движения и длины транспортного средства | 1976 |
|
SU634349A1 |
| МНОГОЦЕЛЕВОЙ МНОГОПОЛОСНЫЙ ЛАЗЕРНЫЙ ИЗМЕРИТЕЛЬ ПАРАМЕТРОВ ДВИЖЕНИЯ ТРАНСПОРТА С ВИДЕОФИКСАЦИЕЙ | 2017 |
|
RU2658120C1 |
| Устройство для измерения параметров транспортного средства | 1985 |
|
SU1262555A1 |
| СПОСОБ КОНТРОЛЯ ДВИЖЕНИЯ ТРАНСПОРТНЫХ СРЕДСТВ | 2011 |
|
RU2488171C1 |
| Интерференционный способ измерения линейных и угловых перемещений зеркальных элементов | 1978 |
|
SU721667A1 |
| УСТРОЙСТВО ДЛЯ РАЗЛИЧЕНИЯ ОБЪЕКТОВ, ПРЕИМУЩЕСТВЕННО СЕЛЬСКОХОЗЯЙСТВЕННЫХ РАСТЕНИЙ, И СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ РАСТЕНИЯ | 1993 |
|
RU2127874C1 |
| ФАРА (ВАРИАНТЫ) И СПОСОБ ОСВЕЩЕНИЯ ДОРОГИ | 2010 |
|
RU2446963C1 |
Изобретение относится к способам контроля движения транспорта и может быть использовано для определения таких характеристик транспортных потоков как скорость и состав. Целью изобретения является расширение функциональных возможностей способа путем определения скорости движения и длины транспортных средств (ТС) в условиях многорядного движения. Согласно способу с помощью блот tf Г lt t-макс - Чи s I-I ка 1 развертки светового луча осуществляют периодическое перемещение светового потока вдоль траектории движения ТС с постоянной скоростью о; в плоскости, перпендикулярной плоскости дороги, над каждой из полос движения ТС. При въезде ТС в контролируемую зону с помощью фотоприемника 3 фиксируют отраженный от ТС световой поток. С помощью блока 4 определяют разность ЬК. времени присутствия ТС в контролируемой зоне в двух следующих друг за другом периодах Т перемещения светового потока и определяют скорость движения ТС по формуле V tut/() kOnpH совпадении направлений движения ТС и светового потока и по формуле V it/(T- ut)iO при их несовпадении. Затем определяют время Т , в течение которого ТС полностью перекрывает контролируемую зону, и определяют длину L ТС по формуле L Vt + 1, где 1 - длина контролируемой зоны. 2 ил. i (Л С ю 00 t ю JD. Xl t t--t2- T t--T t -2r ut Фт 2
Контролируемая зо//а
Редактор Т. Митейко
Составитель С. Мягков Техред Л.Олейник
Заказ 56Тираж 515Подписное
ВНИШШ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д. 4/5
Производственно-полиграфическое предприятие, г, Ужгород, ул. Проектная, 4
фиг.1
Корректор И. Муска
| Способ измерения параметров движения и длины транспортного средства | 1976 |
|
SU634349A1 |
| Топка с несколькими решетками для твердого топлива | 1918 |
|
SU8A1 |
| Способ измерения скорости движения и длины транспортного средства | 1981 |
|
SU1015413A1 |
| Топка с несколькими решетками для твердого топлива | 1918 |
|
SU8A1 |
