Изобретение относится к способам контроля движения транспорта и может быть использовано для определения таких характеристик транспортных потоков, как скорость и состав.
Цель изобретения - повышение точности и диапазона измерения скоростей транспортных средств.
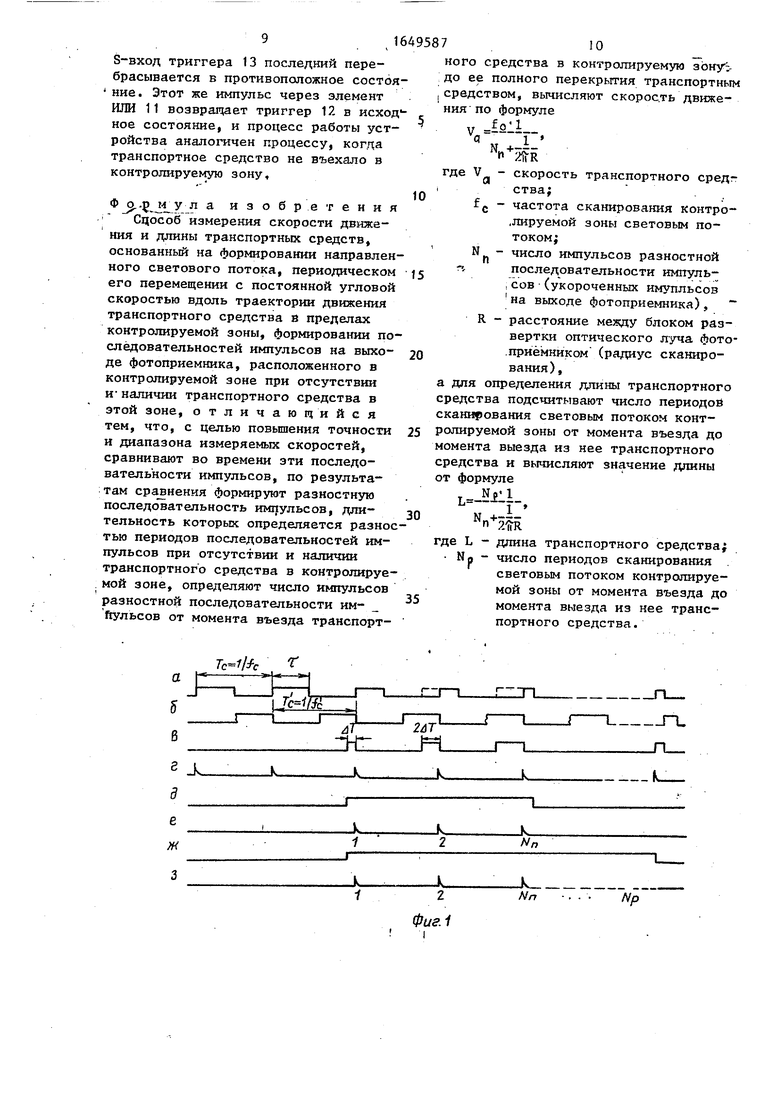
На фиг. 1 изображены временные . диаграммы, поясняющие предлагаемый способ; на фиг. 2 - устройство,
реализующее предлагаемый способ; на фиг. 3 - временные диаграммы, поясняющие работу устройства; на фиг. 4 - структурная схема микропроцессора; на фиг. 5 - блок-схема алгоритма, который реализует микропроцессор .
Устройство, реализующее предлагаемый способ, содержит блок 1 развертки оптического луча 2, протяженный фотоприемник 3, бло1 . 4 памяти, блок 5
%
СО
сл
ОО
sj
формирователей, состоящий из формирователей 6,7,8 и 9 остроконечных (коротких) импульсов, блок 10 счета импульсов, состоящий из элемента ИЛИ 11 триггеров 12 и 13, элементов И 14 и 15 и счетчика 16 импульсов, блок 17 счета периодов импульсов, состоящий из элементов И 18 и 19, триггера 20, одновибратора 21 и счетчика 22 импульсов, и микропроцессор 23.
Микропроцессор 23 содержит регистры 24 9 25 и 26 хранения, арифметико- логическое устройство 27S блок 28 управления и блок 29 определения знака
Сущность предлагаемого способа заключается в следующем.
Остронаправленный световой поток сканируют в горизонтальной плоскости контролируемой зоны, длина которой определяется длиной чувствительной поверхности протяженного фотоприемника, причем ее длина меньше наименьши размеров транспортных средств. Прием светового, потока, сканирующего конт- ролируемую зону, осуществляют протяженным фотоприемником, который формирует электрические импульсы.
Пока транспортное средство не персекает контролируемую зону, на выход фотоприемника формируются импульсы определенной одинаковой длительности пропорциональные скорости сканирования и длине фотоприемника, следующие с частотой сканирования fc лазерного луча (фиг. 1,а). При въезде транспор ного средства в контролируемую зону сформированные фотоприемником импульсы от импульса к импульсу укорачиваются (фиг. 1,а) на величину &Т пропорционально перемещению транспортного средства (фиг. 1,б), при этом значение Доопределяется как
(1)
где Ј
лт
AT-N;
длительность импульсов на выходе фотоприемника, когда транспортное средство не въехало в контролируемую зону; число укороченных импульсов, образованных на выходе фото- приемника при въезде транспортного средства в контролируемую зону (фиг. 19в,е)„ как Ј - это время сканировав ния контролируемой зоны длиной 1 оптическим лучом со скоростью Vc , то
Ј . VC.63R
N« Так
(2)
радиус сканирования}
частота сканирования оптичес ким лучом контролируемой з оны,
откуда
АТ
R-f- N,,
(3)
С П
Таким образом при въезде транспортного средства в контролируемую зону на выходе фотоприемника формируется последовательность импульсов переменной длительности (фиг. 1,6) с периодом Тд 1/Јс Тй+АТ, где ДТ - разност- но периодный квант (фиг. 1,в). При этом
-Т Ј---Ј
UT ТС.ТС Ј..ЈсПодставляя (3) в
(4) (4), получим
откуда
(5)
2Ы-Кп ( Но так как за время Тс транспортное средство перемещается вдоль контролируемой зоны на величину U., то справедливо соотношение Tc Al/Va, с учетом которого выражение (5) примет вид
fc
i
уда
V
f с 1
(6)
Vita
откуда
Для определения значения NH сравнивают во времени последовательности импульсов, формируемые на фотоприемнике при отсутствии (фиг. 1,а) и при наличии (фиг. 1,6) в контролируемой зоне транспортного средства. В результате сравнения выделяют разностную последовательность импульсов (фиг. 1,в), начало формирования которой соответствует моменту въезда транспортного средства в контролируемую зону, а конец - моменту ее полного перекрытия. Затем подсчитывают число импульёов Nn в разностной последовательности и по заранее
5
известным значениям f
с
1 V,
и R опре- согласнб
деляют искомое значение выражению (6).
При этом линейная скорость перемещения лазерного луча и транспорткого средства вдоль контролируемой зоны может быть определена как Vc 2fiR fc и Va 2irR-f0, где fg - искусственно введенная частота сканирования контролируемой зоны движущимся транспортным средством. В этом случае последовательность импульсов с периодом TQ с выхода фотоприемника может рассматриваться как результат сканирования оптическим лучом контролируемой зоны с частотой ЈЛ f -Ј„ ,
чъ i ц
т.е. с линейной скоростью, равной разности лийейных скоростей
10
пульсов, поэтому импульс с выхода формирователя 6 импульсов поступа раньше на S-зход триггера 12, чем импульс с выхода формирователя 8 пульсов через элемент ИЛИ 11 на R вход триггера 12 (фиг. 3,а,б,д,е) Триггер 12 перебрасывается сначал в противоположное (единичное) сос ние, а через время задержки (t$c возвращается в исходное (нулевое) тояние (фиг. 3,н). Импульс с выхо формирователя 6 импульсов поступа через открытый высоким потенциало
При известней-скорости V по време-15 одновибратора 21 элемент И 18 на
R-вход триггера 20 и подтверждает его исходное (нулевое) состояние, а импульс с выхода формирователя импульсов поступает на S-вход три Iгера 13 и перебрасывает его в про воположное (единичное) состояние.
ни от момента въезда в контролируемую зону транспортного средства до момента выезда из нее, равного t Np Tc, где Np - число периодов сканирования Т с оптическим лучом контролируемой зоны от момента въезда в нее транспортного средства до момента выезда из нее (фиг.1,а), можно определить длину транспортного средства Np l
t
(7)
Устройство работает следующим образом .
В заданном сечении автомагистрали на определенном уровне над дорожным полотном в горизонтальном направлении создается сканирующий световой поток. Сканирование оптического луча осуществляется с помощью блока 1 раз- вертки, выполненного, например, в виде вращающегося зеркального приз« ( менного барабана, на который падает луч лазера. На противоположной стороне дорожного полотна устанавливается протяженный фотоприемник 3.
С выхода фотоприемника 3 импульсы длительностью Ј (фиг.3,а,б,в) поступают в блок 5 формирователей на входы
пульсов, поэтому импульс с выхода формирователя 6 импульсов поступает раньше на S-зход триггера 12, чем импульс с выхода формирователя 8 импульсов через элемент ИЛИ 11 на R- вход триггера 12 (фиг. 3,а,б,д,е). Триггер 12 перебрасывается сначала в противоположное (единичное) состояние, а через время задержки (t$c) возвращается в исходное (нулевое) состояние (фиг. 3,н). Импульс с выхода формирователя 6 импульсов поступает через открытый высоким потенциалом
одновибратора 21 элемент И 18 на
R-вход триггера 20 и подтверждает его исходное (нулевое) состояние, а импульс с выхода формирователя 8 импульсов поступает на S-вход триг- Iгера 13 и перебрасывает его в противоположное (единичное) состояние.
Сформированный по заднему фронту импульса с фотоприемника 3 короткий импульс с формирователя 7 импульсов поступает на R-вход триггера 13 и возвращает его в исходное состояние. Одновременно этот импульс поступает на вход элемента И 14, однако он не проходит на его выход, так как элемент И закрыт нулевым сигналом с триггера 12.
Сформированный по заднему фронту импульса с блока 4 памяти короткий импульс с формирователя 9 импульсов поступает через элемент ИЛИ 1t на R-вход триггера 12 и подтверждает его исходное состояние. Кроме того, этот импульс поступает на входы эле ментов И 15 и 19, но не проходит на их выход, так как они закрыты нулевыми сигналами с триггеров 13 и 20 соответственно.
При въезде транспортного средства

| название | год | авторы | номер документа |
|---|---|---|---|
| Способ измерения скорости движения и длины транспортного средства | 1982 |
|
SU1160460A2 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ ДВИЖЕНИЯ ПОЕЗДА | 1991 |
|
RU2025322C1 |
| Способ измерения скорости движения и длины транспортного средства | 1981 |
|
SU1015413A1 |
| Устройство для измерения скорости транспортных средств | 1977 |
|
SU662954A1 |
| Система автоматического направления движения самоходных агрегатов | 1980 |
|
SU898974A1 |
| Устройство для бесконтактного измерения диаметра изделий | 1983 |
|
SU1116310A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ ДВИЖЕНИЯ ПОЕЗДА | 1991 |
|
RU2049693C1 |
| Способ измерения скорости движения и длины транспортного средства | 1985 |
|
SU1280427A1 |
| Устройство для контроля дорожногодВижЕНия | 1979 |
|
SU830492A1 |
| Устройство для считывания информации | 1981 |
|
SU963007A1 |



Изобретение относится к способам контроля движения транспорта и может быть использовано для определения таких характеристик транспортных потоков, как скорость и состав. С целью повышения точности и диапазона измерения скоростей транспортных средств формируют направленный световой поток, периодически перемещают его с постоянной угловой скоростью вдоль траектории движения транспортного средства в пределах контролируемой зоны, формируют последовательности импульсов на выходе фотоприемника при отсутствии и наличии транспортного средства в контролируемой зоне, сравнивают во времени эти последовательности импульсов, по результатам сравнения формируют разностную последовательность импульсов, определяют число импульсов разностной последовательности импульсов от момента въезда до момента полного перекрытия транспортным средством контролируемой зоны, и вычисляют скорость движения по приведенной в-описании изобретения формуле. Для определения длины транспортного средства подсчитывают число периодов сканирования световым потоком контролируемой зоны от момента въезда до момента выезда из нее транспортного средства и вычисляют значение длины по формуле, приведенной в описании изобретения. 5 ил. I /
формирователей 6.и 7 коротких импуль- 45 в контролируемую зону передний фронт сов и одновременно в блок 4 памяти, импульса с выхода блока 4 памяти поступает раньше, чем импульс с выхода фотоприемника 3, в блок 5 формирователей импульсов, поэтому первым пос выхода которого импульсы также поступают в блок 5 формирователей на входы формирователей 8 и 9 коротких импульсов. По передним и задним фрон- 50 ступает короткий импульс с выхода фортам импульсов, поступающих с фотопри-мирователя 8 импульсов через элемент емкика 3 и блока 4 памяти, в блоке 5ИЛИ 11 на R-вход триггера 12 и прд- формирователей импульсов формируютсятверждает его состояние. А при поступ- короткие импульсы (фиг. 3,д,е,ж,з).лении короткого импульса с выхода фор- Пока транспортное средство не въехало 55 мирователя 6 импульсов на S-вход триг- в контролируемую зону, передний фронтгера 12 последний перебрасывается в импульса с фотоприемника 3 поступаетпротивоположное состояние (фиг. 2,и) раньше, чем передний фронт с блока 4и сигналом логической единицы разре- памяти в блок 5 формирователей им-шает прохождение импульса с формиротелей импульсов, поэтому первым поступает короткий импульс с выхода фо мирователя 8 импульсов через элемент ИЛИ 11 на R-вход триггера 12 и прд- тверждает его состояние. А при посту лении короткого импульса с выхода фо мирователя 6 импульсов на S-вход три гера 12 последний перебрасывается в противоположное состояние (фиг. 2,и) и сигналом логической единицы разре- шает прохождение импульса с формирователя 7 импульсов через открытый элемент И 14 в счетчик 16 импульсов.
Импульс с выхода элемента И 14 поступает на S-вход триггера 20 и пере- брасывает его в противоположное состояние и запускает одновибратор 21 с/ периодом релаксации , который нулевым потенциалом закрывает элемент И 18. Сигнал логической единицы с вы- хода триггера 20 открывает элемент И 19.
Короткий импульс, сформированный по заднему фронту импульса с блока 4 памяти, с выхода формирователя 9 им- пульсов поступает через элемент ИЛИ
11на R-вход триггера 12 и возвращает его в исходное состояние. Триггер
12нулевым потенциалом закрывает элемент И 14. Одновременно импульс с вы-4 хода формирователя 9 импульсов.поступает на входы элементов И 15 и 19, но так как элемент И 15 закрыт нулевым потенциалом триггера 13, то он не проходит на его выход. Элемент И 19 от- крыт единичным потенциалом триггера
20, поэтому этот импульс записывается в счетчик 22 импульсов.
В момент следующего сканирования контролируемой зоны оптическим лучом вновь первым поступает импульс с выхода формирователя 8 импульсов и процесс, описанный выше, повторяется. Он повторяется до тех пор, пока транспортное средство полностью не пере- кроет контролируемую зону и импульсов с выхода фотоприемника 3 не будет.
Тогда короткий импульс с выхода формирователя 8 импульсов поступает на S-вход триггера 13 и перебрасывает его в противоположное состояние. Триггер 13 сигналом логической единицы открывает элемент И 15. Одновременно этот импульс с выхода формирователя 8 импульсов поступает через элемент ИЛИ 11 на R-вход триггера 12 и подтверждает его исходное состояние.
Короткий импульс с выхода формирователя 9 импульсов поступает через открытый элемент И 19 в счетчик 22 импульсов и одновременно через эле- мент ИЛИ 11 на R-вход триггера 12 и подтверждает его исходное состояние. Кроме того, короткий импульс с выхо- да формирователя 9 импульсов поступа- ет через открытый элемент И 15 на вход Разрешение записи микропроцессора 23 и осуществляет запись содержимого (Ю счетчика 16 импульсов (фиг. 3,м) в
микропроцессор 23, где по формуле (7) осуществляется вычисление скорости транспортного средства.
По окончании процесса считывания с выхода микропроцессора 23 на установочный вход счетчика 16 импульсов поступает сигнал Сброс и устанавливает счетчик в нулевое состояние.
По истечении времени Трег одновибратор 21 возвращается в исходное состояние и сигналом логической единицы открывает элемент И 18.
При выезде транспортного средства из контролируемой зоны на выходе фото приемника 3 появляется импульс., кото- рый поступает в блок 5 формирователей импульсов, начиная новый пакет укороченных (удлиняющихся по мере выезда транспортного средства из контролируемой зоны) импульсов.
Передний фронт импульса с фотоприемника 3 импульсов поступает в блок 5 формирователей раньше, чём-передний фронт импульса с блока 4 памяти, поэтому короткий импульс с формирователя 6 импульсов поступает через открытый.элемент И 18 на R-вход триггера 20 и возвращает его в исходное состояние. Триггер; 20 сигналом логического нуля закрывает элемент И 19 Одновременно импульс с выхода элемента И 18 поступает на вход Разрешение записи микропроцессора 23 и осуществляет запись содержимого (Np) счетчика 22 периодов импульсов (фиг.3,н) в микропроцессор 23.
По окончании процесса считывания содержимого со. счетчика 22 периодов импульсов с выхода микропроцессора 23 на установочный вход счетчика 22 поступает сигнал Сброс и устанавли-- вает счетчик в нулевое состояние.
В микропроцессоре 23 осуществляется вычисление длины транспортного средства по формуле
Tc N
NЈ-l
Р Г
4+27R
(8)
где L - длина транспортного средства; Np - число периодов сканирования
оптическим лучом контролируемой зоны от момента въезда в нее транспортного средства до момента его выезда из нее., При поступлении короткого импульса
с выхода формирователя 8 импульсов,
соответствующего переднему фронту им-.
пульси .с выхода олока 4 памяти, на
S-вход триггера 13 последний перебрасывается в противоположное состояние. Этот же импульс через элемент ИЛИ 11 возвращает триггер 12 в исход ное состояние, и процесс работы устройства аналогичен процессу, когда транспортное средство не въехало в контролируемую зону,
Формула изобретения
Сцособ измерения скорости движения и длины транспортных средств, основанный на формировании направленного светового потока, периодическом его перемещении с постоянной угловой скоростью вдоль траектории движения транспортного средства в пределах контролируемой зоны, формировании последовательностей импульсов на выходе фотоприемника, расположенного в контролируемой зоне при отсутствии и-наличии транспортного средства в этой зоне, отличающийся тем, что, с целью повышения точности и диапазона измеряемых скоростей, сравнивают во времени эти последовательности импульсов, по результатам сравнения формируют разностную последовательность импульсов, длительность которых определяется разностью периодов последовательностей импульсов при отсутствии и наличии транспортного средства в контролируемой зоне, определяют число импульсов разностной последовательности импульсов от момента въезда транспортЖ 3
ного средства в контролируемую зону;- до ее полного перекрытия транспортным ,средством, вычисляют скорость движения по формуле w Jo
0
5
0
5
где V
О
- скорость транспортного средства;
fc - частота сканирования контро- .лируемой зоны световым потоком;
N - число импульсов разностной -, последовательности импульсов (укороченных имупльсов на выходе фотоприемника),
R - расстояние между блоком развертки оптического луча фотоприёмником (радиус сканирования),
а для определения длины транспортного средства подсчитывают число периодов сканирования световым потоком контролируемой зоны от момента въезда до момента выезда из нее транспортного средства и вычисляют значение длины от формуле
30
т
NH+HR
где L - длина транспортного средства; Np - число периодов сканирования
световым потоком контролируемой зоны от момента въезда до момента выезда из нее транспортного средства.
Nn
k
Nn
Np
Й°///с.,Г
3-Ь
И
г-
2«
LЈJ
Нп . . Нр
5
3 Т
/г.4
-7.
Г Пдск J
t t
/8МЦ1,Ь /
IE±
v
0№tf ИЈ
I/ - g
a-T
/v
HW
„ь Л .
/Вывод
т-ь-LN
Г Остано8 j
1
//P . г
Фиг. 5
| Способ измерения скорости движения и длины транспортного средства | 1981 |
|
SU1015413A1 |
