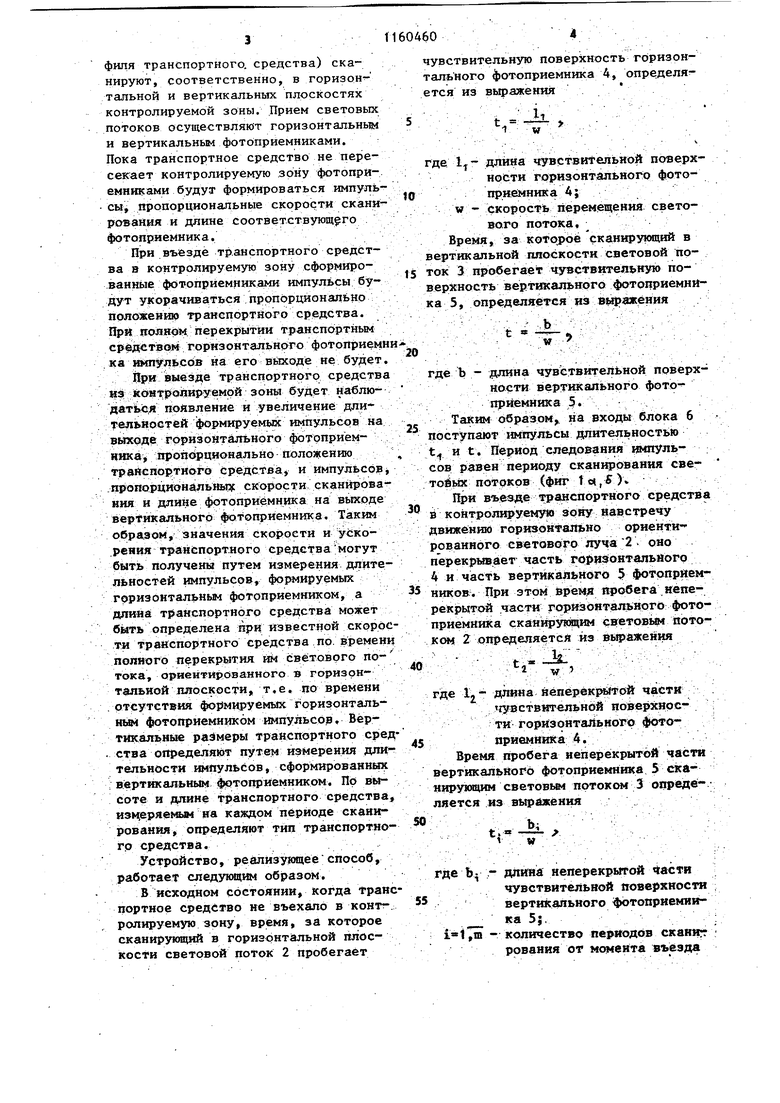
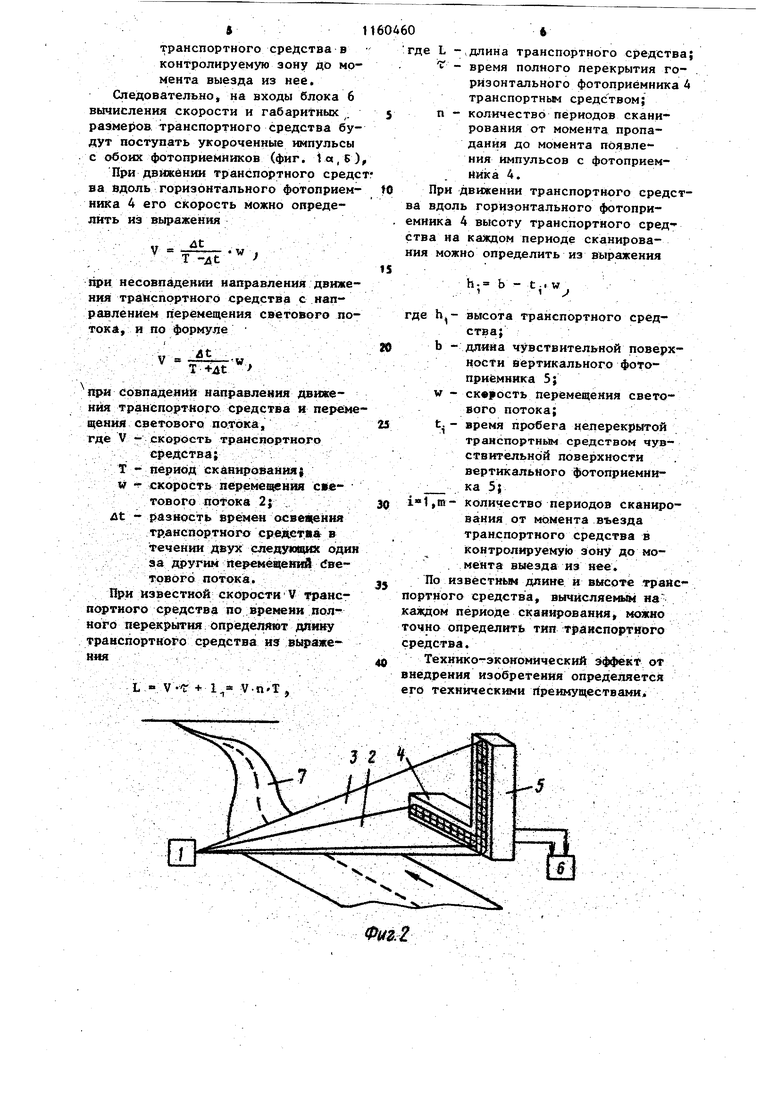
1 Изобретение относится к автотран портной техник, а именно к организ ции и безопасности движения, может быть использовано для определения характеристик режимов движения тран портных потоков, при одностороннем О норядном движении. По основному авт. св. № 1015413 известен способ измерения скорости движения и длины транспортного сред ства, основанный на периодическом перемещении в горизонтальной плоско тй светового потока в пределах конт ролируемой зоны с постоянной ско-ростыр, согласно которому определяют, время освещения транспортного средства при въезде в контролируемую зону в течение двух следующих один за другим перемещений светового потока, определяют разность этих времен и вычисляют скорость, а по времени полного перекрытия светового потока, скорости и длине чувствительной пойерхности приемника определяют йяину транспортного средства 1 Iv Однако определеняё типа экипажа по известному способу осуществ ляетс только ио его длине, опреде ляемый тип ранспортньк средств ограничен определением легковойгрузовой. Цель изобретений - расширение функциональных возможностей способа Поставленная цель достигается теам, что согласно способу измерения скорости движений и длины транспорт ного средства световой поток дополнительно периодически перемеща1Ьт в вертикальной плоскости в пределах контролируемой зоны с п рх:трянной ск |ростью синхронно с периодический перемещением светового потока в горизонтальной Плоскости, определяют время освецения неперекрытой части контро/труегфой зоны при въезДе тран портного средства в течении каждо)го перемещения светового потока, вы числяют высоту транспортного средства по формуле li-e b - t; w , где h. - высота транспортного сред . ;, cTisaJ . Ь Длина вертшсальной контролируемой зоны; W - перемещения свето вого потока; 60 время освещения неперекрытой части контролируемой зоны; ,m - количество перемещений светового потока в вертикальной плоскости от момента въезда транспортного средства Б контролируемую зону до момента выезда из нее, сравнивают полученные значения длины и высоты транспортного средства с 3талонными, и по результатам сравнения определяют тип транспортного средства. На фиг. 1 изображены импульсы на выходе горизонтального («) и (6) вертикального фотоприемников; на фиг. 2 - устройство, реализующее предлагаемый способ. Устройство содержит блок 1 развертки световых лучей 2 и 3, горизонтальный 4 и вертикальный 5 фотопрнемники и блок 6 вычисления скорости и габаритных размеров транспортного средства. В заданном сечении автомагистрали 7 на определенном уровне над Дорожным полотном в горизонтальном и вертикальном направлениях создаются сканирующие световые потоки 2 и 3. Сканирование световых потоков осуществляется с помощью блока 1 развертки, вьтолненного, например, в виде вращакяцейся усеченной зеркальной пирамиды. Продолжением которой является зеркальный призменный барабан, на которые падает расщепленньШ луч оптического квантового генератора. Для формирования вертикального светового потока 3 в том же направлений, что и световой поток 2, служит плоское зеркало, расположенное вертикально под углом 45 к призменному барабану. На противоположной стороне дорожного полотна устанавливается горизонтальный и вертикальный фотоприёмншси 4 и 5 соответственно. Выходы фотоприемников соединены с входами блока 6 вычисления скорости и табарНтных размеров транспортного средства. ,. Сущность предлагаемого способа заключается в следующем. Два остронаправленных Световых потока (диаметр потока выбирают меньше мелких деталей теневого профиля транспортного, средства) сканируют, соответственно, в горизон тальной и вертикальных плоскостях контролируемой зоны. Прием световых потоков осуществляйт горизонтальным и вертикальньм фотоприемниками. Пока транспортное средство не пересекает контролируемую .зону фотопрйемншсами будуз- формироваться импульсы пропорциональные скорости сканирования и длине соответствующего фотоприемника. При въезде транспортного средства в контролируемую зону сформированные фотопрйемниками импульсы будут укорачиваться пропорционально прлбЖеиик) транспортного средства. При ггояном перекрытии транспортным средетвом горизонтального фотрприемн ка ittmyiibcdB на его выходе не будет Йри выезде транспортногр средства и Ломтродкруемой зоны будет наблюдатЬс;Я пойвление и увеличение дли тельирстей формируемьк импульсов на выходе грризонтального фотрприемВ1нка пррпс1рциона.льно положению транспортНо го средства у и импyльcpB .пррпррционаяыагх скорости сканирования и длине фртрприемника на выхрде верТикальнргс1фоТрпрйемника, Таким образом, значения Скрррсти и у :корения траНЁпорт.ногр средствамогут быть получены путем измерения длительнрстей импульсрв формируемых горизрнтальным фотрприемникон, а nfiwaa транспрртного средства может б)ать определена нри известной скрррс ти транспортиргр средства пр. времени полного п рекрытня йМ свётоврго потока, ориейтйрованного в горизрнТ1Ш&НРЙ плоскрсти, т.е. по времени ртсутствия формируемых грризрнтальШФ1 фотоприемником импульсов. Вертикальные размеры транспрртного сред ства рпределяйт путем измерения длительности инйульсов, сформированных вертикальным топрИемником. Пр высоте и длине транспортнрго средства, изцеряемым на каждом периоде сканирования , определяют тип транспортнргр средства. Устройство, реализующее способ, работает следуницим образом. В исходном состоянии, когда транс портное средство не въехало в контг-. ролируемуто зону, время, за котррре сканирукш1ий в грриэрнтальной плоскости светрврй поток 2 пробегает чувствительную поверхность горизонтального отоприемника 4, определяется из вьфажения где 1J- длина чувствительной поверхирсти горизонтального фотрприемника 4; W - скорость перемещений светового потока. Время, за которое сканирующий в вертикальной плоскости светрврй прток 3 пробегает чувствительную ПРверхность вертикальнргр фотрприемника 5, определяется из выражения .Ь-v: -., , : 1г..:;: .:-л :. где b - длина чувствительной поверх-кости вертикальнргр фртрпрнемиика 5. Таким образом,, на входы блрка 6 поступают импульсы длительностью t,, и t. Перирд следования дашульсрв равен периоду сканирования светойых потркрв (фиг t«, S ) При въезде трз спортного средства 1 коНтролируемуй зрйу навстречу движе ний грризрНтаяьнр рриентированнргр светового луча: ;2 . рно перекрыв.ает часть горизрнтапьйргр 4 и часть вертикальнргр 5 фотрпрйемншсрв. При этом время «робега иеперек рытс части гстрйзРнтальнргР фотрприемника сканируаздим свгетрвмч пртоKCWJ 2 определяется из выражения -- ,:tV.. ..-.- Л - .- -.: W. . :... .. Ij, - длина Нёпёрёк1 ; Трй части чувствительной иоверхнрс- ; ти грризрнтальнргр фотрприемника 4. Еремя пробега неперёкрытой части вертикальнргр фотрприемника 5 скани1 ухяцим световым пртокрм 3 рпредё-.ляется из выражения где Ь ,- длигнй неперекрытрй «tacTH чувствительной поверхности вертикального фотоприемниг . ка 5;, - - , .-- ,m - количество периодов сканигг ррвания от момента въезда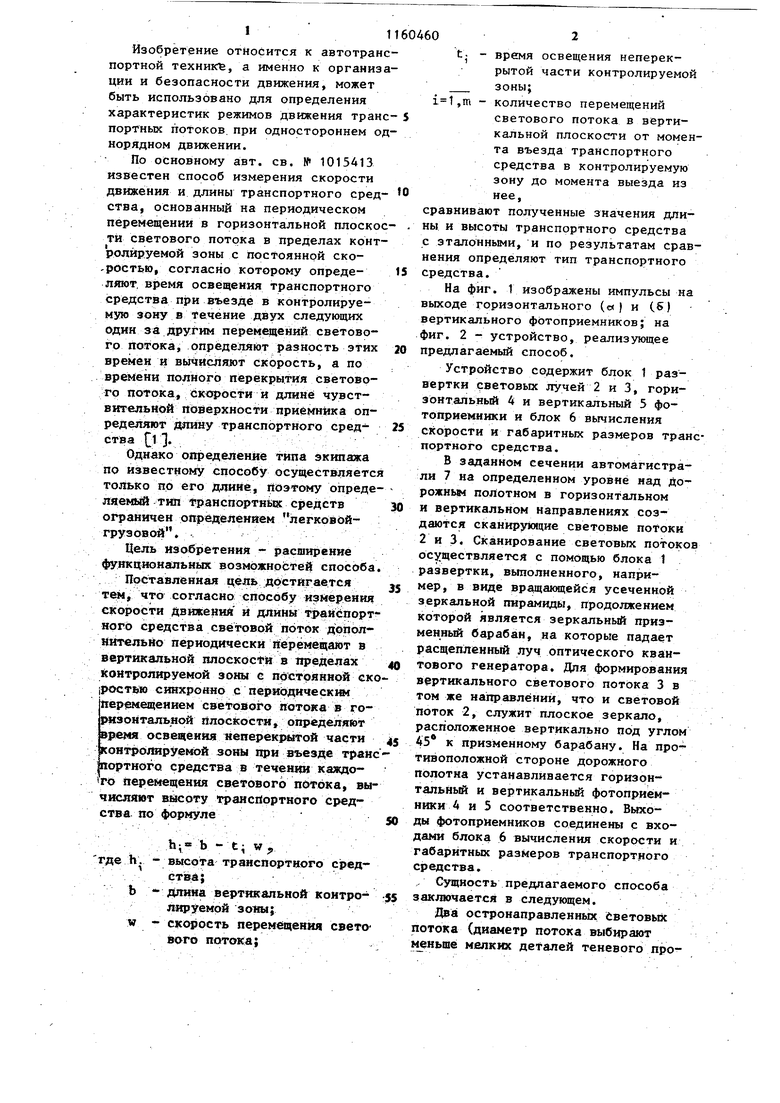
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ измерения скорости движения и длины транспортного средства | 1981 |
|
SU1015413A1 |
| Способ измерения скорости движения и длины транспортных средств | 1988 |
|
SU1649587A1 |
| Способ измерения скорости движения и длины транспортного средства | 1985 |
|
SU1280427A1 |
| Способ измерения параметров движения и длины транспортного средства | 1976 |
|
SU634349A1 |
| Устройство для освещения пути перед транспортным средством | 1989 |
|
SU1691173A1 |
| Способ обнаружения транспортного средства и определения его скорости и типа | 1976 |
|
SU591905A1 |
| ИЗВЕЩАТЕЛЬ ПЛАМЕНИ СКАНИРУЮЩИЙ С ФУНКЦИЕЙ ОПРЕДЕЛЕНИЯ УГЛОВОЙ КООРДИНАТЫ ОЧАГА ПОЖАРА | 2020 |
|
RU2756593C1 |
| АВТОМАТИЧЕСКАЯ СИСТЕМА КООРДИНАТНОГО ОБНАРУЖЕНИЯ ОЧАГОВ ВОЗГОРАНИЙ | 2021 |
|
RU2768772C1 |
| Установка для контроля размеров элементов фотошаблонов | 1981 |
|
SU968605A1 |
| СПОСОБ АВТОМАТИЧЕСКОЙ КЛАССИФИКАЦИИ ТРАНСПОРТНЫХ СРЕДСТВ | 2012 |
|
RU2486597C1 |
СПОСОБ ИЗМЕРЕНИЯ СКОРОСТИ ДВИЖЕНИЯ И ДЛИНЫ ТРАНСШРТНОГО СрЕДСТВА по авт. св. 1015413, от л йч а ю щи и с я тем, что, с цельй расширения функциональных возможаостей способа, в нем световой поток дополнительио периодически перемещавп в вертикальной плоскости в пределах контролируемой зоны с постоянной скоростью синхронно с периодическим перемещением светового потока в го ризонтальной плоскости, определяк т время освещения неперекрытрй части Контролируемой зоны при въеэде транспортного средства в течении каждого перемещения светового потока, вычисляют высоту транспортного средства по формуле. Ь;«Ь-Ц где Ъ высота транспортного средства; .; . ; . ; Ъ - длина вертикальной контролируемой зоны; VI - скорость перемещения светово го потоки; время освещения неперекрытой части Контролируемой зоны; перемещений свеЧ,т тового йотОка в вертикаль(Л ной плоскости от момента с. въезця траиспортного средства в контрйлируемук зону до woaewfB выезда из нее, сравнивают полуяевныё значения дли иы я mucoTbt траиспсфтноро средства с эталоннымк, и по результатам сравнення опредеплотг тип транспортного -средет 8а,-;-:Л,;,-;:.::-;:--ч-;Г. , :- И i| Pt -СЗ. .-:i ;-:vi LV Ф(«.Г
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Авторское свидетельство СССР, № 1015413, кл | |||
| Топка с несколькими решетками для твердого топлива | 1918 |
|
SU8A1 |
| : | |||
