Изобретение относится к сельскох зяйственному машиностроению и может быть использовано в корнеклубнеуборочных машинах с бесступенчатым изменением скорости движения, например, оснащенных гидротрансмиссией типа Зауэр. Известно ;устройство автоматичес кого регулирования режимов работы уборочных машин, содержащее датчик измерения момента на валу сепарирую щего рабочего органа, механическую схему преобразователя и исполнитель ный механизм управления скоростью и режимом элеватора . Недостатками данного устройства являются невысокая точность контролируемого параметра, так как загрузка может определяться сгруживанием в начале элеватора, и ограниченная функциональная направленност так как управлению подвергается тол ко один рабочий орган. Наиболее близким по технической сущности к изобретению является устройство автоматического управления загрузкой самоходной сельскохозяйственной машины, преимущественно картофелеуборочной, содержащее установленные на раме датчик величины загрузки, шарнирно связанный с механизмом сравнения задатчик, компенсатор механизм ручного управления, подключенный посредством соединительных тяг к механизму переключения режимов работы и исполнительный механизм 2 Недостатками этого-устройства являютс.я наличие большой статической ошибки при отработке сигнала возмущения, люфты в кинематической связи и ограниченные функциональные возможности. Цель изобретения - повышение эффективности управления и расширения функциональных возможностей, а также автоматическое регулирование коэффициента передачи в соответствии с объемом поступающей технологической массы. Поставленная цель достигается тем, что устройство снабжено гидроцилиндром с регулируемыми дросселями и односторонне подпружиненным реверсивным золотником, корпус которог закреплен на раме, а плунжер посредством шарнирного звена и компенсатора соединен с механизмом сравнения, при этом выход золотника гидравличес ки свя.заа через регулируемые дроссели с гидроцилиндром, шток которого соединен с механизмом переключ:ения режимов работы, а также тем, что гидроцилиндр выполнен двухштоковым, удатчик кинематически связан с регулируемыми дросселями посредством рейки и.рычага переключения. На чертеже изображено предлагаемое устройство. Устройство автоматического управления загрузкой самоходной сельскохозяйственной машины содержит установленные на раме 1 датчик 2 величины загрузки, элеьатора 3 картофелеуборочной .машины, шарнирно связанный с механизмом сравнения 4 задатчик 5, компенсатор 6, механизм ручного управления 7, подключенный посредством соединительных тяг 8 к механизму переключения режимов работы 9 двухштоковый гидроцилиндр 10 с регулируемыми дросселями Д1 и односторонне подпружиненный реверсивный золотник 12, корпус которого закреплен на раме 1,. а плунжер 13 посредством шарнирного звена 14 и компенсатора б соединен с механизмом сравнения 4, при этом выход золотника 12 гидравли чески связан трубопроводами 15 через регулируемые дроссели 11с гидроцилиндром 10, шток 16 которого соеди-1 нен с механизмом переключения режимов работы 9. Датчик 2 кинематически связан с регулируемыми дросселями 11 посредством рейки 17 и рычага переключения 18, с рамой 1 машины пружиной 19, а с двуплечим рычагом механизма сравнения 4 тягой 20. Опорой механизма сравнения 4 служит перемещаемый упор 21 задатчика 5. Золотник 12 подключен входом к гидросистеме машины, а выходом через трубопроводы 15 и регулируемые дроссели 11 к двухштоковому гидроцилиндру 10, шток 16 которого кинематически связан с механизмом переключения режимов работы 9, другой вход которого кинематической связью 8 соединен с механизмом ручного управления 7. Выход механизма переключения режимов работы 9- соединен тягой 22 с рейкой 23 управления насоса питания гидротрансмиссии привода ходовых колес. Тяга 20, кроме того, соединена рейкой 17 с рычагом переключения 18 регулируемых дросселей 11. Устройство автоматического управ11 ния загрузкой самоходной сельско- хозяйственной машины работает следующим образом. В автоматическом режиме изменение.. величины клубненосной массы от оптимальной величины на элеваторе 3 вызывает перемещение датчика 2, который через механизм сравнения 4, компенсатор 6 и шарнирное звено 14 вызывает соответствующее перемещение плунжера 13 золотника 12. Посредством трубопроводов 15 и регулируемых дросселей 11 золотник 12 подает рабочую жидкость в гидроцилиндр 10, шток которого 16 через механизм переключения режимов работы 9 пе1редает перемещение через тягу 22 рейке 23 управления питания гидротрансмиссии привода ходовых колес машины, осуществ.ляя изменение поступательной
скорости движения и, следовательно, величины поступаемой клубненосной массы на элеватор 3,
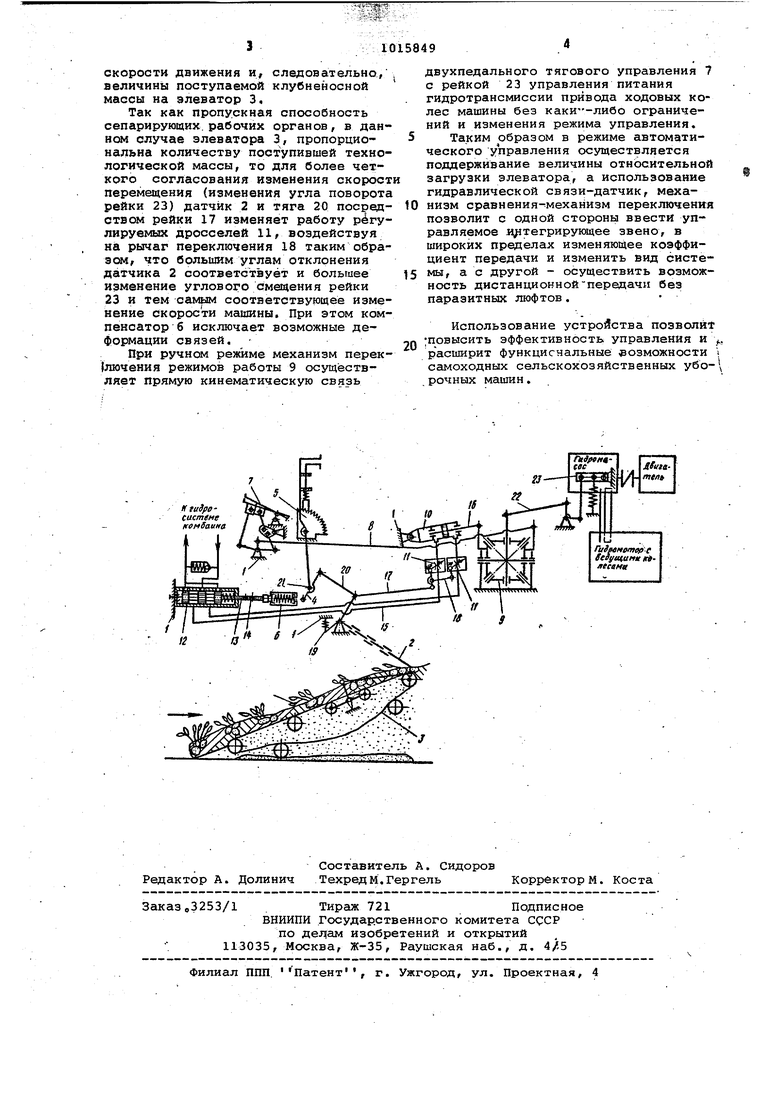
Так как пропускная способность сепарирующих, рабочих органов, в данном случае элеватора 3, пропорциональна количеству поступившей технологической массы, то для более четкого согласования изменения скорост перемещения (изменения угла поворота рейки 23) датчик 2 и тяга 20 посредством рейки 17 изменяет работу рёгулируемБК дросселей 11, воздействуя на рычаг переключения 18 таким образом, что большим углам отклонения датчика 2 соответствует и большее изменение углового смещения рейки 23 и тем самым соответствующее изменение скорости машины. При этом компенсатор б исключает возможные деформации связей.
При ручном режиме механизм перек|лючения режимов работы 9 осуществляет прямую кинематическую связь
двухпедального тягового управления 7 с рейкой 23 управления питания гидротрансмиссии привода ходовых колес машины без каки-либо ограничений и изменения режима управления.
Таким образом в режиме автоматического управления осуществляется поддерживание величины относительной загрузки элеватора, а использование гидравлической связи-датчик, меха0низм сравнения-механизм переключения позволит с одной стороны ввести управляемое .1Ц1тегрирующее звено, в широких пределах изменяющее коэффициент передачи и изменить вид системы, ас другой - осуществить возмож5ность дистанционной передачи без паразитных люфтов.
Использование устройства позволит ;повысить эффективность управления и ,,
0 расширит функциональные возможности самоходных сельскохозяйственных убо- рочных машин,
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство автоматического управления загрузкой самоходной уборочной машины | 1980 |
|
SU886801A1 |
| Устройство автоматического управления загрузкой самоходной уборочной машины | 1983 |
|
SU1159502A1 |
| Устройство для автоматического регулирования технологического режима корнеклубнеуборочной машины | 1981 |
|
SU986333A1 |
| Устройство автоматической стабилизации загрузки самоходного картофелеуборочного комбайна | 1982 |
|
SU1102513A1 |
| Копирующее устройство для автоматического вождения сельскохозяйственной машины по борозде | 1981 |
|
SU959649A1 |
| СПОСОБ РАБОТЫ ПОГРУЗЧИКА-ОЧИСТИТЕЛЯ КОРНЕПЛОДОВ И АГРЕГАТ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2011 |
|
RU2471334C1 |
| ГИДРАВЛИЧЕСКИЙ ПРИВОД ПРЕИМУЩЕСТВЕННО МОБИЛЬНОЙ УСТАНОВКИ С КАЧАЮЩЕЙСЯ ЧАСТЬЮ | 2015 |
|
RU2629763C2 |
| Гидропривод рабочего оборудования фронтального погрузчика | 1989 |
|
SU1745843A1 |
| МОБИЛЬНАЯ ПУСКОВАЯ УСТАНОВКА | 2015 |
|
RU2620007C2 |
| Самоходная машина | 1987 |
|
SU1731657A1 |
1. УСТРОЙСТВО АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ЗАГРУЗКОЙ САМОХОДНОЙ СЕЛЬСКОХОЗЯЙСТВЕННОЙ МАШИНЫ, преимущественно картофелеуборочной, содержащее установленные «а раме датчик величины загрузки, шарнирно связанный с механизмом сравнения задатчик; Компенсатор, механизм ручного управления, подключенный посредством соединительных тяг к механизму переключения режимов работы, и исполнительный механизм,о тличающеёс я тем, что, с целью повышения эффективности управления и расширения функциональных возможностей, устройство снабжено гидроцилиндром с регулируемыми дросселями и односторонне подпружиненным реверсивным золотником, корпус которого закреплен на раме, а плунжер посредством шарнирного ,звена и компенсатора соединен с механизмом сравнения, при этом выход зЬлотника.гидравлически связан через регулируемые дроссели с гидроцилиндром, шток которого соединен с меха4 измом переключения режимов.работы. 2.Устройство по п. 1, о т л и- g чающеес я тем, что гидроци- , линдр выполнен двухштоковым. 3.Устройство по п. 1, отлич.аюцееся тем, что, с целью автоматического регулирования коэф§ фициента передачи в соответствии с объеме поступающей технологической массы, датчик кинематически связан с регулируемьами дросселями посредством рейки и рычага переключения.. сл 00 4 со
KtuipatitcmtHt/гомбаина ruleeHfoieff-e tteymanit iriMfiffa
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Устройство для автоматического регулирования режимов работы уборочных машин | 1976 |
|
SU615884A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Авторское свидетельство СССР по заявке № 2971040/30-15, кл | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
