1
Изобретение относится к весоизмерительной технике.
Известны весы, в которых для установки грузоприемной платформы в горизонтальное положение перед взвешиванием грузов имеется специальная следящая система, включающая датчики положения платформы и электропривод Cl 1.
Недостаток такой системы установки платформы заключается в сложности выполнения.
Наиболее близким к изобретению по технической сущности является весоизмерительное устройство, содержащее установленные на опорной раме весовой механизм и грузоприемную платформу с механизмом ее .установки в горизонтальное положение, выполнен ным в виде подвижных рамок с шарнирными сочленениями 2 ,
Однако в известном устройстве прицедение грузоприемной платформы в горизонтальное положение перед взвешиванием грузов производится с помощью ручных домкратов, что увеличивает время на подготовку к работе
Цель изобретения - повышение быст родействия взвешивания за счет умень шения времени на установку грузопри,емной платформы.
Поставленная цель достигается тем, что в весоизмерительном устройстве, содержащем установленные на опорной раме весовой механизм и грузоподъемную платформу с механизмом ее установки в горизонтальное положение, выполненным в виде пйдвижных рамок с шарнирными сочленениями, шарнирные сочленения механизма установки.грузоприемной платформы в горизонтальное положение снабжены тормозами, связанными с узлом дистанционного управления.
На фиг. 1 схематически изображено весоизмерительное устройство, общий вид; на фиг. 2 - то же, вид сверху; -на фиг. 3 - конструкция шарнирного сочленения с тормозом.
Устройство состоит из опорной рамы 1, грузоприемной платформы 2, весового механизма 3 с силоизмерительньач датчиком 4 и вторичным отсчетным прибором 5 и механизма установки платформы в горизонтальное положение, включающего в себя связанную с весовым механизмом рамку 6, промежуточную рамку /, четыре шарнир39882
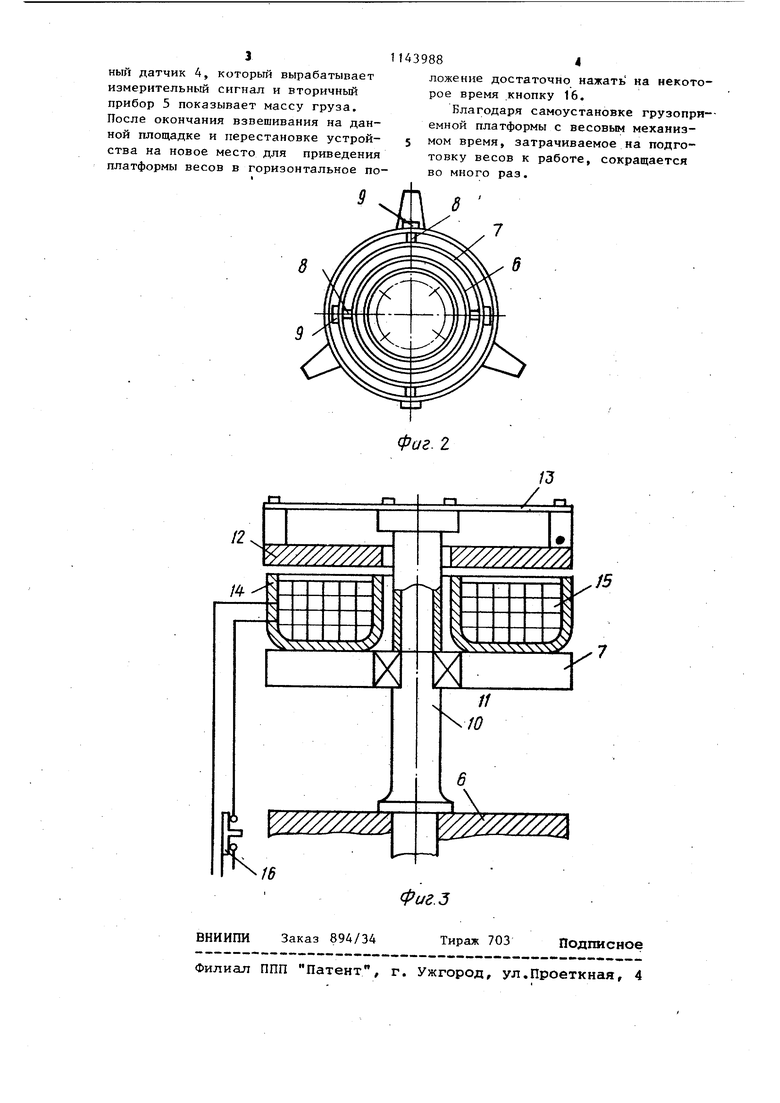
ных сочленения 8, образующих универсальный шарнир, и тормоза 9. Сочленение 8 состоит из цапфы 10, закрепленной неподвижно на рамке 6 (или 7)
5 и подвижно с помощью подшипника 11 закрепленной в рамке 7 или опорной раме 1.
Тормоз состоит из подвижного диска 12, связанного с помощью плоских
to пружин 13 с цапфой 10 и неподвижного сердечника 14 электромагнита, привода тормоза (в данном случае его роль играет обмотка электромагнита 15 и его сердечник 14) и элемента управления тормозом (здесь - электрическая кнопка Ссамовозвратом 16). Привод тормоза может быть не только электрическим, но и пневматическим, механическим ручным или иным.
20 Устройство работает следующим образом,
В исходном положении кнопка 16 занимает контакты, электрический , ток идет по обмотке электромагнита
25 15, сердечник электромагнита 14 притягивает и плотно прижимает к себе подвижный-диск 12. Таким образом цапфа 10 жестко зафиксирована от проворота в подшипнике 11, в результате чего все устройство представляет собой жесткую систему.
После установки грузоприемной платформы 2 на опорную раму 1 нажи мают кнопку 16. Цепь питания электромагнита 15 размыкается, плоские пружины 13 оттягивают подвижный диск 12 от сердечника 14 электромагнита, цапфа 10 приобретает возможность вращаться в.подшипнике 11, При этом благодаря универсальному шарниру, образованному шарнирными сочленениями 8, позволяющими вращаться весовому механизму 3 в двух вертикальных взаимно перпендикулярных плоскостях, Iплатформа 2 в силу того, что центр тяжести весового механизма находит)Ся ниже осей вращения универсального шарнира, занимает горизонтальное положение. После успокоения колебаний подвижной системы кнопку 16 от пускают, ток начинает поступать в обмотку 15, срабатывают тормоза в обоих плоскостях вращения и взвешивающее устройство превращается снова в жесткую систему. После этого на Шlaтфop #y 1 накладывают взвешиваемый груз, весовой механизм 3 передает весовую нагрузку на силоизмерительный датчик 4, которьш вырабатывает измерительньй сигнал и вторичный прибор 5 показывает массу груза. После окончания взвешивания на данной площадке и перестановке устройства на новое место для приведения платформы весов в горизонтальное поП439884
ложение достаточно нажать на некоторое время .кнопку 16.
Благодаря самоустановке грузоприемной платформы с весовым механизмом время, затрачиваемое на подготовку весов к работе, сокращается во много раз.
В
Фаг. 2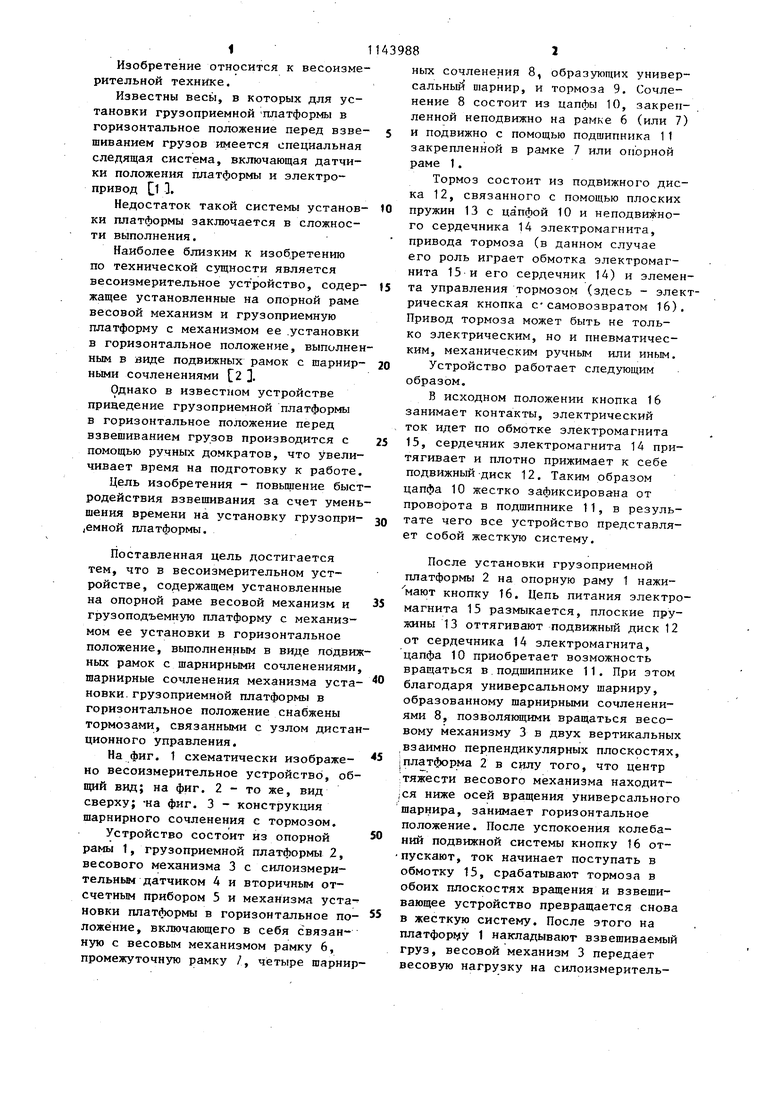
| название | год | авторы | номер документа |
|---|---|---|---|
| Весоизмерительное устройство | 1979 |
|
SU859825A1 |
| Устройство для взвешивания расплава | 1982 |
|
SU1401288A1 |
| АВТОМОБИЛЕРАЗГРУЗОЧНЫЙ ВЕСОВОЙ КОМПЛЕКС | 2011 |
|
RU2453817C1 |
| Устройство для взвешивания цилиндрических изделий в потоке | 1982 |
|
SU1016687A1 |
| Судовое весовое устройство | 1982 |
|
SU1064149A1 |
| Устройство для метрологической аттестации крановых весов | 1991 |
|
SU1774187A1 |
| УСТРОЙСТВО ДЛЯ ВЗВЕШИВАНИЯ | 1996 |
|
RU2108551C1 |
| ВЕСОИЗМЕРИТЕЛЬНОЕ УСТРОЙСТВО | 1998 |
|
RU2140060C1 |
| Весы для взвешивания животных | 1989 |
|
SU1765714A1 |
| ПЛАТФОРМЕННЫЕ ВЕСЫ | 1971 |
|
SU435460A1 |
ВЕСОИЗМЕРИТЕЛЬНОЕ УСТРОЙСТВО, содержащее установленные на опорной раме весовой механизм и грузоприемную платформу с механизмом ее установки в горизонтальное положение, выполненным в виде подвижных рамок с шарнирными сочленениями, отличающееся тем, что, с целью повышения быстродействия за счет уменьшения времени на установку грузоподъемной платформы, в нем шарнирные сочленения механизма установки грузоподъемной платформы в горизонтальное положение снабжены тормозами, связанными с узлом дистанционного управления. 4 СО i;o 00. 00 ф{/г./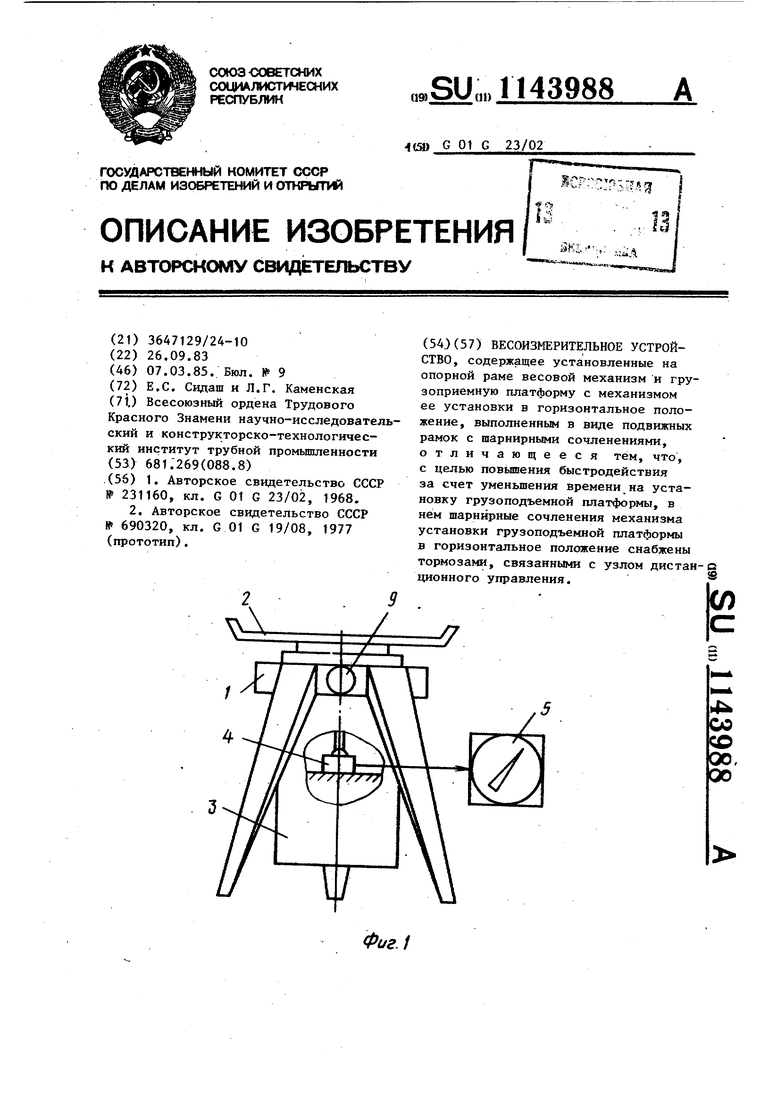
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| МНОГОКОМПОНЕНТНЫЕ АЭРОДИНАМИЧЕСКИЕ МАГНИТОЭЛЕКТРИЧЕСКИЕ ВЕСЫ | 0 |
|
SU231160A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Устройство для взвешивания и нагрузки | 1977 |
|
SU690320A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
