1
Изобретение относится к области весоизмерительной техники.
Известны устройства для взвешивания труб в процессе их производства, еодержаш,ие весовой механизм с грузоприемными призмами и датчиком перемещения, подключенным к вторичному прибору, и механизм нодачи и сброса труб с приводом.
Эти механизмы конструктивно сложны. В предложенном устройстве механизм подачи и сброса труб выполнен в виде размещенного между грузоприемными нризмами поворотного вала,, снабженного укладывающими рычагами с вогнутыми рабочими поверхностями н диаметрально противоположно им расположенными сбрасывающими кулачками с выпуклыми рабочими поверхностями с профилем в виде спирали, установленными ниже грузонриемнЕзГх призм, ось которых смепдена относительно оси поворотного вала в направлении сброса труб.
Благодаря этому упрощается конструкция устройства.
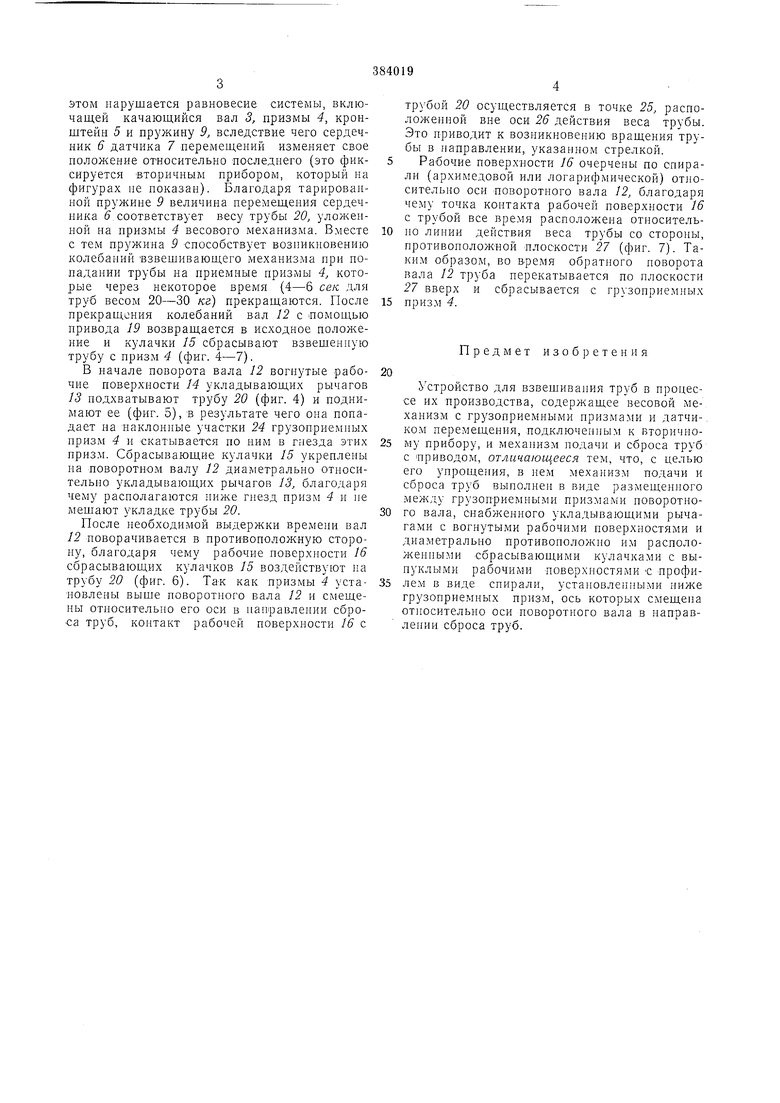
На фиг. 1 показано описываемое устройство, фронтальный вид; на фиг. 2 - то же, вид сверху; на фиг. 3-вид по стрелке А па фиг. 2; на фиV. 4, 5, 6 и 7 схематично показаны положения механизма нодачи и сброса труб при его работе.
На станнне / центробежной мащины для литья труб установлены оноры 2 качающегося вала 3 весового механизма. На валу 3 жестко укреплены грузоприемные призмы 4 и кронщтейн 5, на конце которого расположен сердечник 6 датчика 7 перемещений, закрепленного на тумбе S. Рядом с датчиком 7 размещена тарировочная пружина 9, опирающаяся торцами на кронштейн 5 и опору 10.
На станине / установлены также опоры // новоротного вала 12. На валу закреплены укладывающие рычаги 13, рабочие поверхности 14 которых выполнены вогнутыми, и сбрасывающие кулачки 15, рабочие поверхности 16
которых выполг1ены выпуклыми.
Новоротный вал 12 рычагом 17 и тягой IS связан с црнБодо.м 19 челночного двнжения, например пневмо- пли гидро 1нлиндром, и расположеп между грузоприемными призмами 4.
Устройство работает следующим образом. Очередная труба 20 после извлечения из изложницы с помощью механ1 зма 21 скатывается по роли.ким 22 над укладывающпми рычагами 13 п действует на подвижной упор 23.
В результате этого включается автоматпческая система управления устройством, срабатывает прпвод 19 че.-1 ночного движения, поворачивая вал 12, п труба 20 подхватывается рабочими поверхностями 14 рычагов 13 н укладывается на ппизмы 4 весового механизма. При
этом нарушается равновесие системы, включащей качающийся вал 3, призмы 4, кронштейн 5 и пружину 9, вследствие чего сердечник 6 датчика 7 перемеш ений изменяет свое положение относительно последнего (это фиксируется вторичным прибором, который на фигурах не показан). Благодаря тарированной пружине 9 величина неремеш,ения сердечника 5 соответствует весу трубы 20, уложенной на призмы 4 весового механизма. Вместе с тем пружина 9 способствует возникновению колебаний взвешиваюш,его механизма при попадании трубы на приемные призмы 4, которые через некоторое время {4-6 сек. для труб весом 20-30 кг) прекращаются. После прекращения колебаний вал 12 с помощью привода 19 возвращается в исходное положение и кулачки 15 сбрасывают взвешенную трубу с призм 4 (фиг. 4-7).
В начале поворота вала 12 вогпутые рабочие поверхпости 14 укладывающих рычагов 13 нодхватывают трубу 20 (фиг. 4) и поднимают ее (фиг. 5), в результате чего она попадает па Наклонные участки 24 грузоприемных призм 4 и скатывается по ним в гнезда этих призм. Сбрасывающие кулачки 15 укреплены на поворотном валу 12 диаметрально относительно укладыЕшющих рычагов 13, благодаря чему раснолагаются ниже гнезд призм 4 и не мешают укладке трубы 20.
После необходимой выдержки времени вал 12 поворачивается в противоположную сторону, благодаря чему рабочие поверхности 16 сбрасывающих кулачков 15 воздействуют на трубу 20 (фиг. 6). Так как призмы 4 устаповлены выше поворотного вала 12 и смещены относительно его оси в направлении сброса труб, контакт рабочей поверхпости 16 с
тр)бой 20 осуществляется в точке 25, расположенной вне оси 26 действия веса трубы. Это приводит к возникновению вращения трубы в направлении, указанном стрелкой. Рабочие поверхности 16 очерчены по спирали (архимедовой или логарифмической) относительно оси поворотного вала 12, благодаря чему точка контакта рабочей поверхности 16 с трубой все время расположена относительно линии действия веса трубы со стороны, противоноложной плоскости 27 (фиг. 7). Таки.м образом, во время обратного новорота вала 12 труба перекатывается по плоскости 27 вверх и сбрасывается с грузоприе.мных
призм 4.
Предмет изобретения
Устройство для взвешивания труб в процессе их производства, содержащее весовой механизм с грузоприемными приз.мами и датчи-. ком перемещения, подключенным к вторичному прибору, и механизм подачи и сброса труб с приводом, отличающееся тем, что, с пелью его упрощения, в нем механизм подачи и сброса труб выполнен в виде размещенного между грузоприемными призмами поворотного вала, снабженного укладывающими рычагами с вогнутыми рабочими поверхностями и диаметрально противоположно им расположенными сбрасывающими кулачками с выпуклыми рабочими поверхностями с профилем в виде спирали, установленными ниже грузоприемных призм, ось которых смещена относительно оси поворотного вала в направлении сброса труб.
20
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для взвешивания цилиндрических изделий | 1979 |
|
SU857725A2 |
| Устройство для взвешивания труб в процессе их производства | 1976 |
|
SU613214A1 |
| Устройство для взвешивания цилиндрических изделий | 1985 |
|
SU1292855A1 |
| Устройство поштучного взвешивания длинномерных изделий | 2016 |
|
RU2629692C1 |
| Устройство для кладки кирпичных стен | 1974 |
|
SU772489A3 |
| Устройство для взвешивания цилиндрических изделий | 1977 |
|
SU657268A1 |
| Устройство для передачи труб на охладительный конвейер | 1978 |
|
SU685925A1 |
| БИБЛИОТЕКА IЛ. И. Фалалеев | 1972 |
|
SU349456A1 |
| Устройство для изготовления рулонных пружин | 1976 |
|
SU654329A1 |
| Устройство для взвешивания круглого проката и труб в поперечном потоке | 1988 |
|
SU1569575A1 |


Фиг 2
2/ ВидА
Фиг. 6
27 Фиг. 7
