Изобретение относится к высоизмерительной технике, в частности к уст ройствам для взвешивания труб из ферромагнитногр материала, например стальных и чугунных.
Известно устройство для взвешивания цилиндрических изделий, включающее весовой механизм с грузоприемными элементами, силоизмерительные преобразователи и механизм подачи и сброса, выполненный в виде поворотных укладывающих рычагов 11.
Однако точность взвешивания не обеспечивается из-за того, что груз, скатываясь на грузоприемные элементы под воздействием рычагов, имеет значительный запас кинетической знергии, что исключает возможность применения силоизмерительных преобразователей высокой чувствительности.
Наиболее близким по технической сущности к предлагаемому является устройство, которое содержит весовой механизм с грузоприемным центрирующим элементом, имеющим возможность вертикального перемещения, и силоизмерительный преобразователь, подключенный к системе индикации управления 2 .
В этом устройстве подъем и опускание груза с помощью грузоцентрирую1чей вилки сопровождаются ускорениями, создающими дополнительную динамическую нагрузку на силоизмерительные преобразователи. Вследствие зтого данное устройство обладает низкой точностью взвешивания. Кроме того, требуется дополнительное время на подъем и опускание груза, что снижает быстродействие взвешивания.
Целью изобретения является повышение трчности и быстродействия взвешивания груза.
Для достижения поставленной цели грузоцентрируюи1ий элемент выполнен в виде связанного с системой индикации и управления электромагнита с магнитопроводом, имеющим ограничители перемещения груза в потоке.
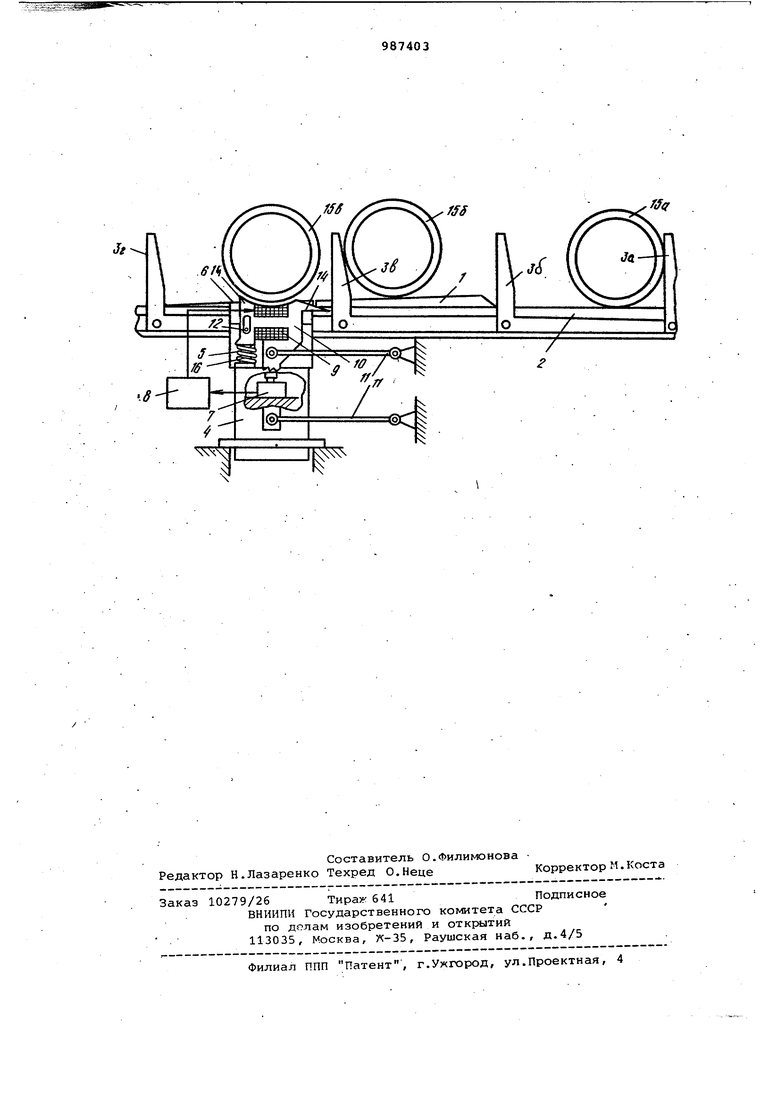
На чертеже схематично изображено устройство.
Устройство состоит из наклонной плоскости 1, расположенной на рельсовом пути 2, шлепперной цепи с упорами За, Зб, Зв, Зг, весового механизма 4 с грузоприемной платформой 5, имеющей рабочую поверхность 6, которая размещена с зазором в разрыве наклонной плоскости 1 и выполнена также наклонной. Силоизмерительный преобразователь 7 расположен в весовом механизме и подключен к системе 8 индикации и управления. Выход системы управления подключе к обмотке 9, размещенной на грузоцентрирующем элементе 10, расположен ,ном на подвеске в виде рычагов с uiap нирами 11, Грузоцентрирующий элемент 10 имеет возможность перемещаться вертикально. Пределы вертикального перемещения грузоцентрирующего элемента 10 определяются штифтом 12 и пазом 13. Грузоцентрирующий элемент 10 имеет ограничители 14 перемещения груза 15 в потоке, выполненные в виде наклонных порогов, которые при включении питания обмотки 9 становятся полюсами электромагнита.. Грузоцентрирующий элемент связан с грузопри емнойплатформой 5 посредством пружины 16.. Устройство работает следующим.обра 3 ом. Труба в непрерывном потоке переме вдается по рельсовому пути 2, ведомая упорс1ми 3 шлепперной цепи. Грузоцент риругаций элемент 10 пружиной 16, сил сжатия которой выбрана несколько большей, чем вес элемента 10, припод нят над уровнем наклонной плоскости 1, При этом высота необходимого превышения отрегулирована положением штифта 12 в пазу 13. Вес грузоцентрирующего элемента 10 приложен к гру зоприемной платформе 5, суммарный вес которых скомпенсирован системой 8 индикации и управления. В исходном состоянии груз 15 занимает положение 15а. Упор За шлепперной цепи, дойдя до положения Зб, поднимет груз 15 на наклонную плоскость 1, после чего груз, двигаясь под действием силы тяжести, упирается в заднюю кромку упора Зв и далее движется со скоростью упора, занимая положение 156. Двигаясь дальше, груз накатывается на наклонный порог ограничителя 14 перемещения грузоцентрирующего элемента 10. Преодолевая действие пружины 16, груз своим весом утапливает грузоцентрирук щий элемент 10. Как только груз дойдет до положения 15в, полюса электромагнита притягивают груз и его дальнейшее движение прекратится. При этом динамическая нагрузка при остановке груза полностью прикладываетсяк рычагам с шарнирами 11. В положение 15в происходит взвешивание. Грузоприемная платформа 5 воспринимает и передает на силоизмерительный преобразователь 7 только вес накатившегося груза. Система 8 индикации и управления дает визуальный отсчет массы груза, регистрирует массу и, после окончания операции взвешивания, обеспечивает обмотку 9. При э-том груз, -освободившись от электромагнитного сцепления с полюсами, скатывается дальше по наклонной плоскости, догоняя упор в положении 3г. Освободившись от груза, пружина 16 возвраьтает Грузоцентрирующий элемент 10 в исходное состояние. Взвеши:пание груза в потоке происходит без остановки шлепперной цепи. Груз останавливается только на время измерения сигнала си оизмерительного преобразователя. Формула изобретения Устройство для автоматического взвешивания цилиндрических длинномерных грузов в потоке, содержащее весовой механизм с грузоприемным центрирующим элементом, имеющим возможность вертикального перемещения, и силоизмерительный преобразователь, подклю- ченный к системе индикации и управления, отличающее с я тем, что, с целью повышения точности и быстродействия взвешивания, Грузоцентрирующий элемент выполнен в виде связанного с системой индикации и управления электромагнита с магнитопроводом, имеющим ограничители перемещения груза в потоке. Источники информации, принятые во внимание при экспертизе 1.Авторское свидетельство СССР № 657268, кл. .G 01 G 17/06, 1979. 2.Авторское свидетельство СССР № 575498, кл. G 01 G 17/06, 1977 (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для взвешивания цилиндрических изделий в потоке | 1982 |
|
SU1016687A1 |
| Устройство для весового учета количества перекачиваемой жидкости | 1982 |
|
SU1026017A1 |
| Весоизмерительное устройство | 1990 |
|
SU1755057A1 |
| Устройство для автоматического взвешивания длинномерных грузов в потоке | 1976 |
|
SU575498A1 |
| УСТРОЙСТВО ДЛЯ ВЗВЕШИВАНИЯ | 1992 |
|
RU2057301C1 |
| ПЛАТФОРМЕННЫЕ ВЕСЫ | 1971 |
|
SU435460A1 |
| Весовое устройство | 1989 |
|
SU1770767A1 |
| Прецизионные большегрузные стационарные весы | 1978 |
|
SU748139A1 |
| УНИВЕРСАЛЬНЫЕ СЧЕТНЫЕ ВЕСЫ | 1992 |
|
RU2065580C1 |
| ПОРТАТИВНОЕ УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ВЕСА ТРАНСПОРТНЫХ СРЕДСТВ | 2007 |
|
RU2345330C1 |