Изобретение относится к автоматичес му управлению и может быть йспользо ванр аля построения цифровых систем автоматического регулирования, в кото рых информация о зааанном и фактическо значении регулируемой коорцинаты представлена в частотной форме. Известно устройство для формировани интегральной составляющей закона регул рования, содержащее генератор частоты зааающего сигнала, датчик частоты сиг нала обратной связи, блок несовпадения, цифро-аналоговый преобразователь и реверсивный счетчик, входы которого через блок несовпадения подключены к ге- нератору частоты задающего сигнала и к датчику частоты сигнала обратной связи а выход - к входу цифро-аналогового преобразователя . Среднее значение напряжения на выходе этого устройства определяется следующи выражением u.« -v-J X5{i;-xa)dt, X - соответственно заданное и действительное значение регулируемой координаты} постоянная времени интегрирования, определяется, как правило, параметрами объекта регулирования; Кд - коэффициент передачи датчика д - коэффициент передачи цифроаналогового преобразователя (вес единицы младшего разряда). Однако в установившемся режиме на выходе реверсивного счетчика существуют пульсации единицы младщего разряда. Это приводит к периодическим уменьшениям и увеличениям на единицу дис кретности Д напряжения на выходе цифро-аналогового преобразователя, что снижает статическую точность регулирования. При заданном значении коэффициента передачи датчика регулируемой координаты, требуемую постоянную времени интегрирования, можно обеспечить только соответствующим выбором единицы дискретности Л. Это исключает возможность выбора Л исходя из условия обеспечения требуемой статической точности регулирования, что может приводить к ее снижению. Целью изобретения является повышение тошости регулирования. Поставленная цель достигается тем, что в устройство для формирования интегральной составляющей закона регулирования, содержащее цифро-аналоговый преобразователь генератор частоты зада ющего сигнала и датчик частоты сигнала обратной связи, введены блок синхронизации и соединенные последовательно счет чик импульсов, первый регистр памяти, первый сумматор, второй регистр памяти, второй сумматор и третий регистр памяти, выход которого подключен к второму входу второго сумматора и к входу цифро-аналогового преобразователя, причем второй вход треть&го регистра памяти подключен к первому выходу блока синхронизации, вход которого подключен к выходу датчика частоты сигнала обратной связи, а второй, третий и четвертый выходы блока синхронизации подключены к вторым входам соответственно второго регистра памяти, nejjsoro регистра памяти и счетчика импульсов, первый вход которого подключен к выходу генератора частоты задающего сигнала. На чертеже представлена функциональная схема устройства для формирования интегральной составляющей закона регулирования. Устройство содеркит генератор 1 частоты задающего сигнала, счетчик 2 импульсов, первый регистр 3 памяти, первый сумматор 4, второй регистр 5 памяти, второй сумматор 6, третий регистр 7 памяти, цифро-аналоговый преобразователь 8, блок 9синхронизации и-датчик 10 частоты сигнала обратной связи. Устройство работает следующим обрагзом. Сумматоры 4 и 6 могут быть построны на одноразрядных полных сумматорах. дно из слагаемых сумматора 4 является постоянней величиной, что упрощает схему. Блок 9 синхронизации осуществляет синронизацию работы устройства. С приходе а вход блока синхронизации импульса частоты сигнала обратной связи на его выодах формируются четыре тактирующих импульса, сдвинутых во времени. Первый тактирующий импульс поступает на вход ервого регистра 3 памяти, который при том фиксирует число, записанное в c4eTw ике 2 импульсов. Второй тактирующий импульс поступает на соответствующие ходы триггеров счетчика 2 импульсов, и устанавливает их в нулевое состояние. ретий и четвертБ1й тактирующий импулыы поступают на входы соответственно второго 5 и третьего 7 регистров памяти, которые при этом фиксируют коды чисел, сформированные на stixoaax первого 4 и второго 6 сумматоров. На счетный вхоа счетчика 2 импуль .Л сов Б течение периоаа T частоты т поступают импульсы f . Крц числа V записанного в счетчик, равен сумме им« пульсов (цискретных величин) частоты t, поступивших на его вход за время Т . В то же время1| поскольку любой счетчик является интегратором, число , с точностью цо одного квант/а (импульса) равно интегралу от частоты за в ре- (T)at (2) где частота, пропорциональная заданному значению Х регулируемой координаты; f - период частоты J , пропо{ циональной фактическому значению регулируемой координаты;$-КдХ - частота, пропорциональная фактическому значению X регулируемой координаты; Ха К А коэффициенты передачи соответственно генератора частоты задающего сигнал 1 и датчика частоты сигнала обратной связи, причем , что необходимо для нормальной работы уст7 ройства. Код числа ) фикснруют в первом регистре памяти и подают на вход сум матора 4. На выходе последнего формиру ют код числа, --w -K, (г) 21 1,1 --fe - Код лшсла фиксируют во втором регистре 5 памяти и подают на первый вход второго сумматора 6. Второй сумматор 6 и третий регистр 7 памяти образуют накапливающий сумматор, на выходе которого формируется код числа. N; N, c:r.i где у - число периодов Т частоты сиг нала обрагиоА связи, пр ж1едших за время интегрирования Ьу,. Выражение (4) с учетом выраи ний (2) и (3) можно представить в следующем виде , 5) где f - локальное время, связанное с реалы1ым временем соотношением . и , r--i-r Т... ги Длительность произвольного периода частоты сигнала обратной связи определяется вьражением Г5(г)атч. (6) Запишем выражение (5) с учетом выражения (6) ir, Л--Л- Л л После преобразований выражение (7) ртнимает следующий вид , При условии, что время интегрирования -bv равно: .--.5т-. bi . выражение (8) можно представить в сле-ч дующем виде bni-fK I K,Itn,,w-x(t )ia-t (9 Следовательно, напряжение на выходе цифро-аналогового преобразователя 8 равно: )-7H)3atr L о tx3W-x(i)aif (10) Таким образом, на выходе устройства формируется аналоговый сигнал U , характеризующий интегральную составляю- щую закона регулирования. Если действительное значение регулируемой координаты равно заданному, то
ф аовый сдвиг межау выхоонымй часто теми генераторе частоты аадаюшего cmv нала н аатчика частоты сигнала обратной связи остается постоянным. Поэтрму в течен ю кажаого перпооа TJ - в счет чшс 2 поступает ооно и то же чисАо ,М импульсов, равное
Слеаовательно, пульсации напряжения на вьЪсоае цифро-аналогового преобразователя отсутствуют.
Анализ выражения (1) показьшает, что при заданных значениях коэффициента передачи КдИ постоянной времени ин-гэг рирования за счет соответствуюрюго вы
бора значения коэффициентаК К / можно установить требуемое значение Ь, которое спределяется заданной статической точно стью регулирования.
Устройство для формирования интег ральной составляющей закона регулирова ния может быть использовано при постро ении систем автоматического регулирования, в которых информация о заданном и фактическом знвчениях регулируемой координаты представлена в частотной форме, в частности при построении системы управления двигателем постоянного тока. В этом случаетрегулируемой координатой является скорость вращения двигателя, а в качестэе датчика обратной связи используется импульсный датчик.

| название | год | авторы | номер документа |
|---|---|---|---|
| Способ управления многофазным инвертором и устройство для его осуществления | 1984 |
|
SU1458951A1 |
| Система адаптивного управления параметром технологического процесса | 1988 |
|
SU1620989A1 |
| Устройство регулирования ударных воздействий | 1990 |
|
SU1787284A3 |
| Система управления вибростендом | 1984 |
|
SU1259224A2 |
| Система регулирования скорости | 1984 |
|
SU1229727A1 |
| Электропривод переменного тока | 1986 |
|
SU1334342A1 |
| Устройство для моделирования случайных блужданий | 1981 |
|
SU999063A1 |
| Многокоординатное устройство для управления | 1989 |
|
SU1777121A2 |
| Система управления вибростендом | 1985 |
|
SU1305649A1 |
| Устройство для программного управления намоточным станком | 1984 |
|
SU1232044A1 |
УСТРОЙеТШ ДЛЯ ФОРМИРОВАНИЯ ИНТЕГРАЛЬНОЙ СОСТАВЛЯЮ ЙШЙ ЗАКОНА ИЕГУЛИРСЗВАНИЯ, содержашее Ш1фро-а11алоговый прео6{)азователь, генератор частоты эааакикего сигнала я аатчих частоты сигнала обратнс связи, от ли ч а ю ш е 0с я тем, что, с веелью. пбвьоиения точности регулирования, в него введены блок синхрон1 1.за11Ш и сюе пяненные послеаовательно с Фетчик uKi- пульсов, первый регистр памяти, первый сумматор, второй регистр памяти, второй сумматор и третий регастр памяти, Blii хов которого поаключен к второму вхЬау второго сумматора и к ахоцу логового преобразователя, прйчеМ второй вхоц третьего регистра п&мячл Mitaatto isv к первому выходу блока синхронидаивИ пооключеиного вхопом к выхеву аафчиха . .частоты сигнала обра-той otaieh, а второй, /третий и четвертый выхоаЬ вйюка сшяосронизации подключены к BTO|%tM BxoiiaM соответственно второго pereclt e памя г, первого регистра памята и счетчика пульсов, перщлй Вхоа которого поцклк ч а к выходу генератора частоты ааваюшегч сигнала.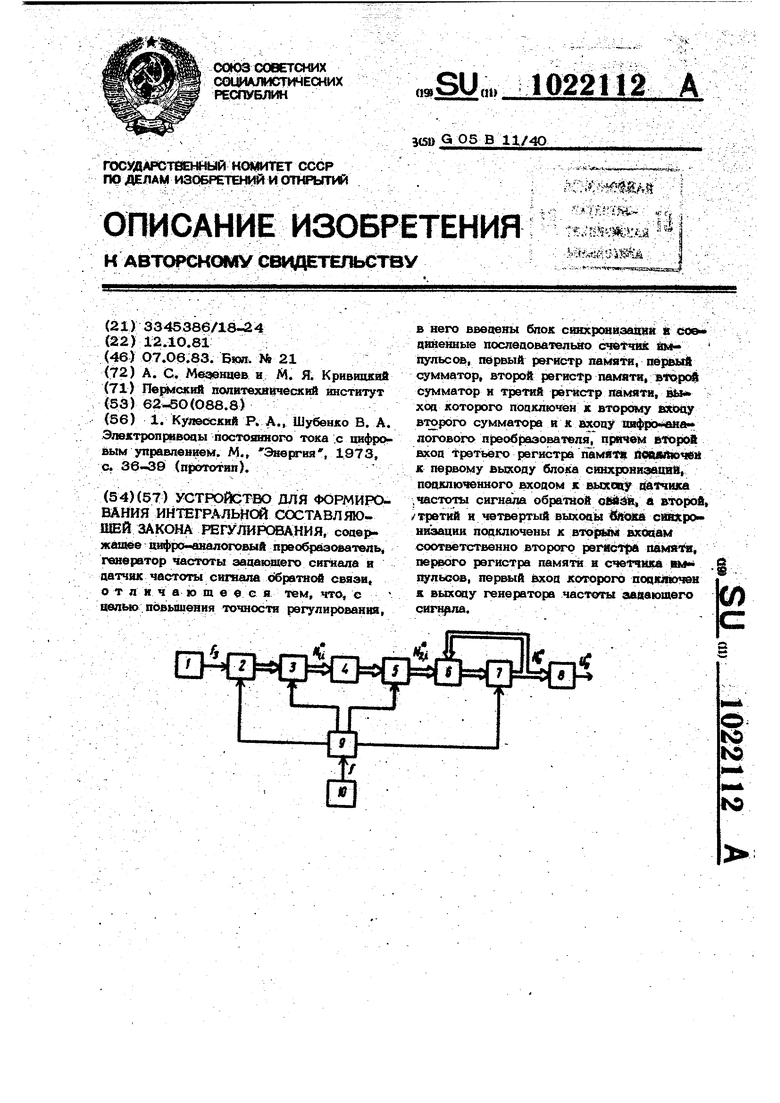
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Куавсский Р | |||
| А., Шубенко В | |||
| А | |||
| Электропривооы посГоянногч) тока .с пифррвым управлением | |||
| М,, Сергия, 1973, с | |||
| Коридорная многокамерная вагонеточная углевыжигательная печь | 1921 |
|
SU36A1 |
