каждого вычислительного блока соединен с первым входом первого мульт.и- ппексора и с входом третьего цифро- аналогового преобразователя соответствующего блока связи с приводом, вход управления первого мультиплексора каждого вычислительного блока соединен с входом управления соответствующего демультиплексора и с выходом второго шифратора кода адреса j вход управления второго мультиплексора каждого вычислительного блока соединен с выходом первого шифИзобретение относится к автоматизации управления и предназначено ля использования в системах программного управления намоточными станками и другими объектами, имеющими высокую контурную скорость, напри- мер роботами.
Цель изобретения -повышение очйости и расширение области применения устройства, что позволяет уменьшить динамические погрешности и noB icHTb пр6иэвр11ительность станка.
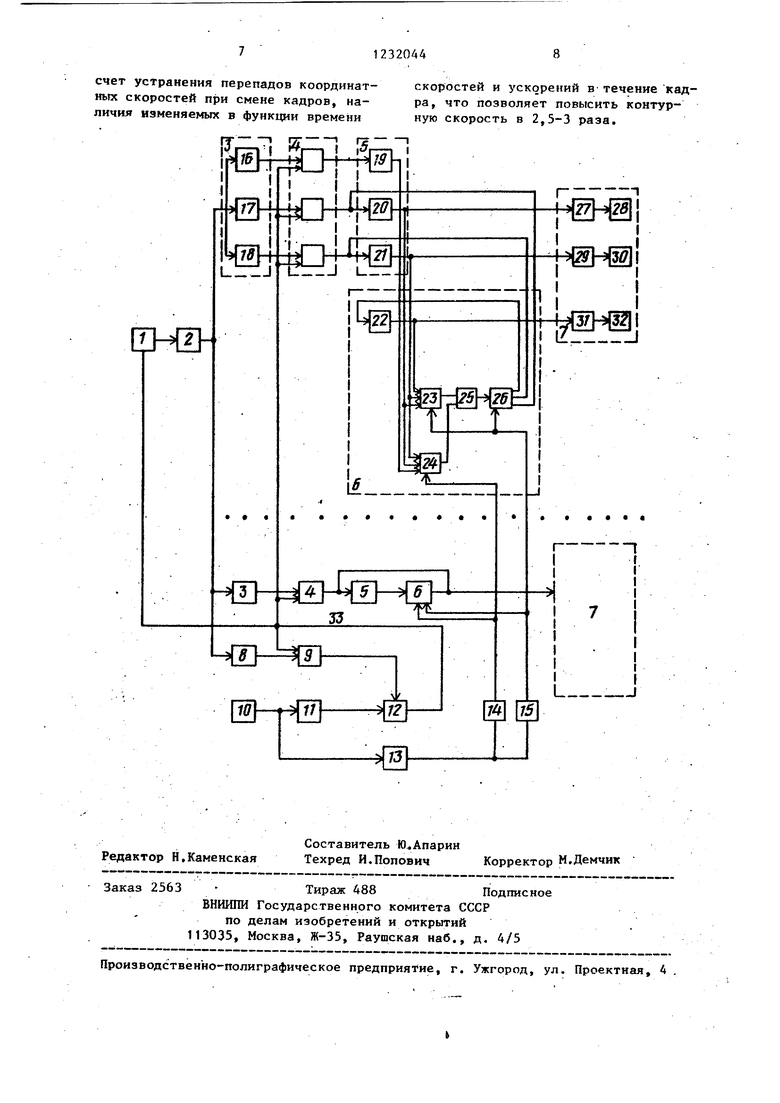
На чертеже .изображена схема уст- ройства для программного управления намоточным станком.
Устройство содертшт блок 1 ввода программы, например фотосчитывающее устройство или канал связи с ЭВМ . верхнего уровня, блок 2 декодирования, п блоков 3 буферной памяти, п групп элементов И 4, п блоков 5 оперативной памяти, п вьтчислительных блоков 6, п блоков 7 связи с приводом, регистр 8 времени кадра, элемент И 9, генератор 10 импульсов, делитель 11 частоты, счетчик 12 циклов, распределитель 13 тактовых импульсов, первый 14 и второй 15 шифраторы кода адреса.
Каждый блок 3 буферной памяти содержит первый 16, второй Т7 и третий 18 буферные регистры, каждая группа 4 элементов И содержит три элемента И каждьй блок 5 оперативной памяти содержит первый 19, вторатора кода адреса, вычитающий вход счетчика циклов соединен с выходом делителя частоты, вход записи счетчика циклов подключен к выходу элемента И, второй вход которого соединен с выходом счетчика циклов, первый вход с выходом регистра времени кадра, вход которого соединен с выходом блока декодирования, выход распределителя тактовых импульсов подключен к входим .-первого и второ- гб шифраторов кода адреса, а вход - к выходу генератора импульсов.
рой 20 и третий 21 оперативные регистры, каждый вычислительный блок 6 содержит регистр 22, первый 23 и второй 24 мультиплексоры, сумматор 25
и демультиплексор 26, каждый блок 7 связи с приводом содержит первый цифроаналоговый преобразователь 27, первый усилитель 28, второй цифро- аналоговый преобразователь 29, второй 30 усилитель, третий 31 цифро- аналоговый преобразователь и третий усилитель 32,,
Блоки 3 буферной памяти предназначены для хранения параметров, определяющих закон движения по каждой из п одновременно управляемых координат и i+1 кадре во время отработки i-ro кадра, причем в буферных регистрах 16 хранится значение третьей производной от пути по времени по соответствующей координате, в буфёрг- ных регистрах 17 - значение второй производной (ускорения) по соответствующей координате, в буферных ре- . гистрах 18 - значения первой производной (скорости) по соответствующей координате. Группы 4 элементов И предназначены для передачи информации (i+1)-ro кадра из буферной в оперативную память по окончанию отработки i-ro кадра. Вычислительные блоки 6 предназначены для определения в каждом цикле интерполяции но- вьпс значений координаты, скорости и
ускорения по соответствующим управ
3
ляемым координатам. Блоки 7 связи с приводом предназначены для преобразования в аналоговую форму и соглсованию по уровню ускорения, скорости и координаты для вьдачи на приво в качестве сигналов управления. Регистр 8 времени кййра предназначен дпя хранения величины времени отработки (i+1)-ro кадра при отработке i-ro кадра. Счетчик 12 циклов предназначен для определения момента окончания отработки кадра Vd . Рас- пределитель 13 тактовых импульсов предназначен для определения номера такта в каждом цикле интерполяции. Шифраторы Т4 и 15 кода адреса предназначены для формирования сигналов управления мультиплексорами 23 и 24 и демультийлексором 26 каждого вычислительного блока 6.
Устройство работает следующим образом.
Управляющая программа, которая вводится в устройство через блок 1 ввода программы, содержит информаци о значениях третьих производных, ускорения и скорости в начале каждо кадра по всем п одновременно управляемым координатам и времени отработки кадра (количество циклов интерполяции) . Закон движения по каждой 1Й)Ординате в кадре описывается уравнением третьей степени
a3t3
kX(t) x(0)+a,t + Ejt
где x(0) - значение координаты при t О, то есть в начальный момент ин тедполяции.
Разложение функций x(t), x (t), X (t) в ряд Тейлора, дает
)
x-4ir,
)--x(t)..-X(i)At -|--ub-- Af
xлt-дh x t)Лt) .
x Yt Ati x i K ctlut
где At tjn tj - период вычислений.
Эти -соотношения позволяют вычислять новые значения текущей координаты И ее производных на основе значений этих величин в предьдущем цикле интерполяции.
Дифференцирование исходного закона движения x(t) дает следующие соотношения :
(t) (t)
а
+/a,t
2а,-н
6a,,t
//I
(t) 6а,
При t О имеем х (0)
It
(0)
2
а„
X
III
(0)
а.
10 а
5
2
Таким образом, коэффициенты а, , а, заданные в кадре управляющей программы,определяют значения первой второй и третьей производных при t О, т.е. в начале кадра, и задают закон ;5эижения в пределах кадра по
15 каждо й из координат. Аппроксимация заданной траектории отрезками кривых, описываемых уравнениями третьего порядка, позволяет исключить перепады скоростей при смене кадров, и тем са20 мым устраняет необходимость снижать контурную скорость для уменьшения этих перепадов до допустимого уровня , как это делается при линейной интерполяции. С Этой целью коэффи25 циенты а, по каждой координате, зaдaвae itыё в управляющей программе, выбираются таким образом, чтобы вьтолнялись соотношения
30
lU
a,
+3a3Ktt,
а,, , а (ktO
коэффициенты К-го кадра;
коэффициент (К+1)- го кадра; время отработки К-го кадра.
40
45
Задача вычислительного блока - net основе коэффициентов а, а,, а определить в каждом цикле ийтёрполяции текущие значения координаты первой и второй производных. Значение третьей производной постоянно в течение кадра , ,
xi,,xi.x.t. ;
о
X
ut W
55
Расчет в блоке 6 ведется по формулам
.
X, + VJ +
21 2
ч
Ht
Va i4-
Y
wj+ w; б б
в оперативных регистрах 19 каждого блока 5 хранятся значения W/6 по каждой координате,в оперативных регистрах 20-значения а/2, в оперативных регистрах 21 - значения V.B регистрах 22 вычислительных блоков 6 в соответствии с (1) формируются значения текущих координат,
i
Каждый цикл интерполяции состоит из одиннадцати тактов - по количеству сложений в соответствии с (1)t Во время первых трех .тактов выход регистра 22 через мультиплексор 23 подсоединен к первому .входу сумматора 25 Ко второму входу сумматора 25 при
этом через мультиплексор 24 последо- js регистра 8 времени кадра через
вательно подключаются выходы оперативных регистров 21, 20 и 19, Выход сумматора 25 на время первых трех тактов подключен к входу регист-- ра 22, в котором да это время формируется новое значение координаты х На следующие пять тактов Тс первом входу сумматора 25 через первый мультиплексор 23 подключается выход третьего оперативного регистра 21, а ко второму входу - через мультиплексор 24 дважды подключается выход второго оперативного регистра 20 и тризкды - выход первого оперативного регистра 19, Выход сумматора 25 при этом через ;з(емультиплексор 26 подключен к ВХОДУ1: третьего оперативного регистра 21, где таким образом оказьгеается сформированным новое значение скорости, В следующие три такта к первому входу сумматора через первый мультиплексор,, 23 подключен выход второго, оперативного регистра 20, а ко второму входу - через второй мультиплексор 24 трижды подключается вь1ход первого оперативного регистра 17, Выход сумматора на это время подключен к входу вто-- рого оперативного регистра 20, в котором- оказывается сформированным новое значение ускорения, С вьтходов оперативных регистров 20 - 22; текущие значения ускорений, скоросей и координат подаются на входы
соотпетствующих блоков 7 для полу- чкния аналоговых сигналов управле- ния приводом по ускорению, скорости 5 и положению.
Работой мультиплексоров 23 и 24 и демультиплексора 26 управляют первый 14 и второй 15 шифраторы кода адресаi на выходе которых в каждом 10 такте формируются коды, определяющие выходы каких регистров подключаются к первому и второму входам сумматора и к входу какого регистра подключается выход сумматора. Входы 15 обоих шифраторов подключены к выходу распределителя 13 (число вькодов распределителя 13 равно одиннадцати в соответствии с числом тактов в цик- ,ле интерполяции),
20
Конец отработки кадра определяется,
по обнулению счетчика 12 циклов, В начале отработки информация о.количестве циклов в кадре переписывается
V
30
35
40
45
50
55
элемент И 9 и счетчик 12 циклов. Вход вычитания счетчика 12 соединен с вы-, ходом делителя 11 частоту. Коэффициент деления этого делителя равен 11, вход его Соединен с выходом генератора 10 импульсов, частота которого определяет частоту тактов, а значит, и частоту расчета новых текущих значений ускорений, скоростей и координат, то есть частоту циклов интер- поляции.
При обнулении счетчика 12 циклов вырабатывается сигнал .Конец отработки кадра, который по связи 33 поступает на вторые входы групп 4 ., элементов И и второй вход элемента И 9, в результате чего содержимое блоков 3 переписывается в блоки 5, а содержимое регистра И времени кадра - в счетчик 12, Начинается отработка следующего кадра. Одновременно этот же сигнал поступает в блок 1 ввода программы, в результате чего в блоки 3 записываются параметры V, а/2, W/6, определяющие закон движения по соответстпукяц й координате в следующем кадре, а в регистр 8 времени кадра - количество циклов интерполяции в следующем кадре,
Применение данного устройства для программного управления намоточным станком по сравнению с известными устройствами повыгаает производительность управляемого оборудсзания за
счет устранения перепадов координатных скоростей при смене кадров, наличия иэмeняe 4ыx в функции времени
скоростей и ускорений в течение кадра, что позволяет повысить контурную скорость в 2,5-3 раза.
РГг
LrZJ
Li -
| название | год | авторы | номер документа |
|---|---|---|---|
| Многокоординатный линейно-круговой интерполятор | 1988 |
|
SU1603345A1 |
| Многокоординатный цифровой интерполятор | 1986 |
|
SU1315939A1 |
| Устройство для двухкоординатного программного управления | 1981 |
|
SU962857A1 |
| Многокоординатный цифровой линейный интерполятор | 1987 |
|
SU1522154A1 |
| УСТРОЙСТВО ДЛЯ КОРРЕКЦИИ ОШИБОК | 1991 |
|
RU2037271C1 |
| Телевизионный имитатор | 1981 |
|
SU965020A1 |
| Устройство для предварительной обработки информации | 1991 |
|
SU1837274A1 |
| Устройство для программного управления | 1985 |
|
SU1249482A1 |
| Устройство интерполирования сигналов телевизионного изображения | 1989 |
|
SU1690213A1 |
| Устройство для управления многокоординатным оборудованием | 1987 |
|
SU1427334A1 |

4}-i 33
PL.
-H
I.I
Редактор Н.Каменская
Составитель Ю Апарин
Техред И.Попович Корректор М.Демчик
Заказ 2563 Тираж 488Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д, 4/5
Производственно-полиграфическое предприятие, г. Ужгород, ул. Проектная, 4
| Состав для удаления осфальтеносмолопарафиновых отложений | 1988 |
|
SU1629304A1 |
| Машина для изготовления проволочных гвоздей | 1922 |
|
SU39A1 |
| Устройство для программного управления | 1975 |
|
SU543921A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
