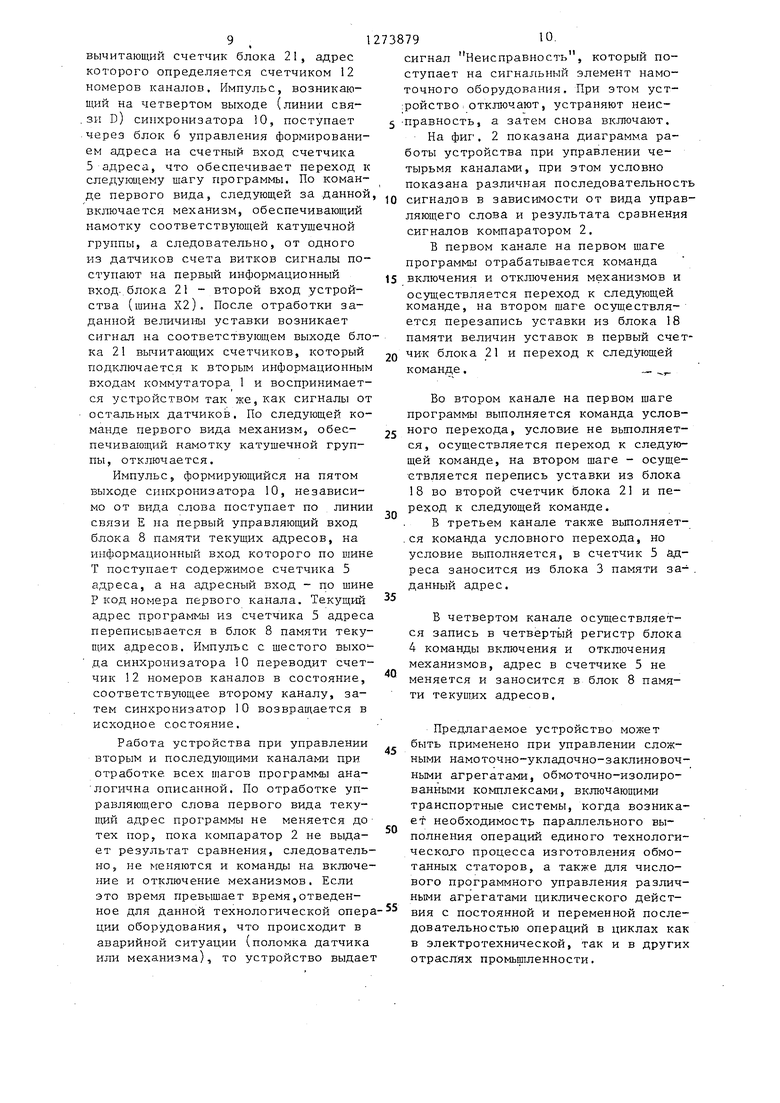
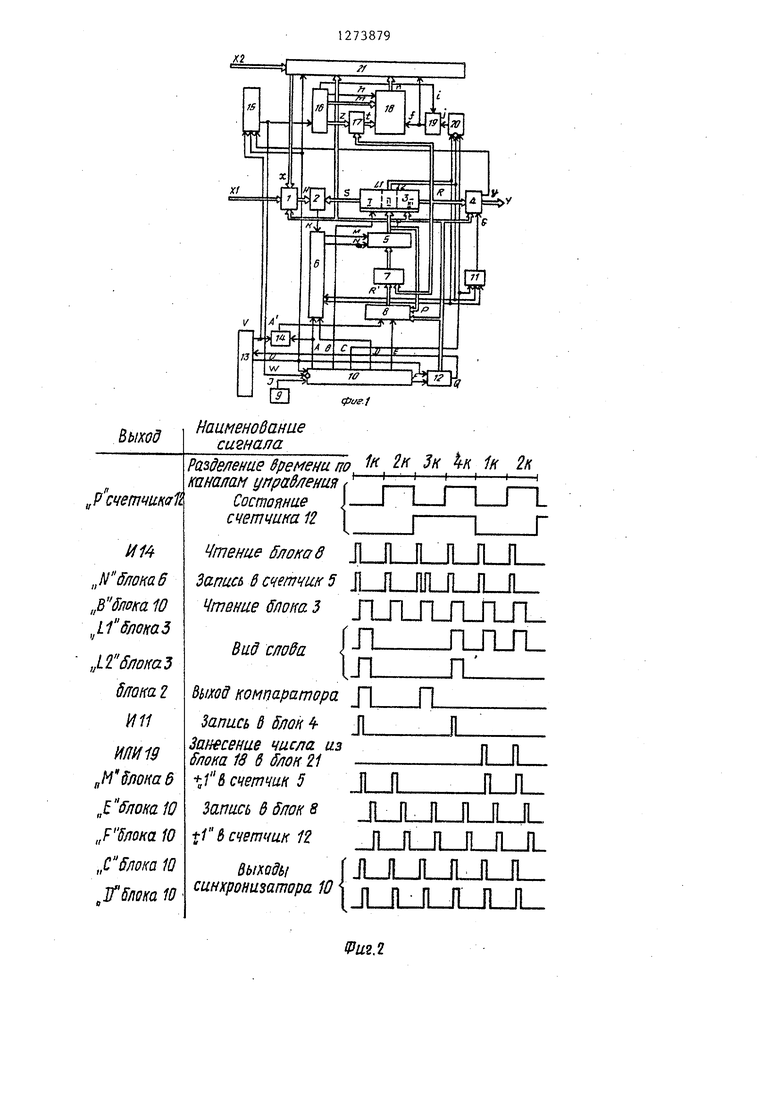
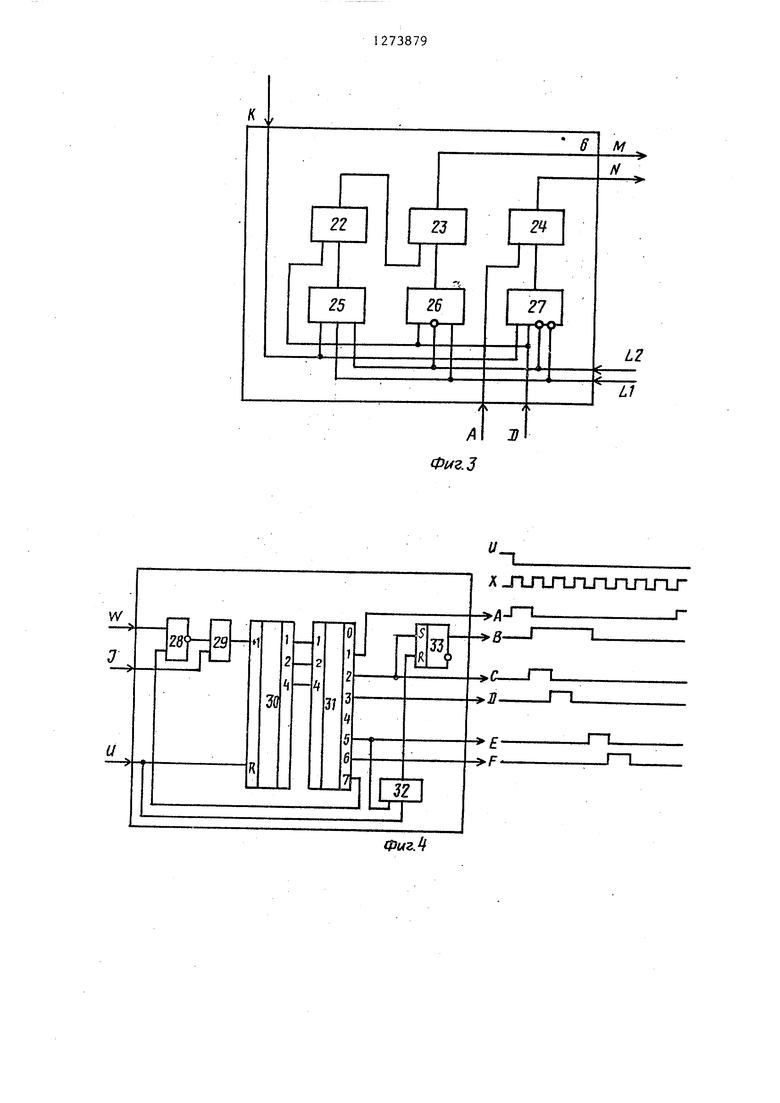
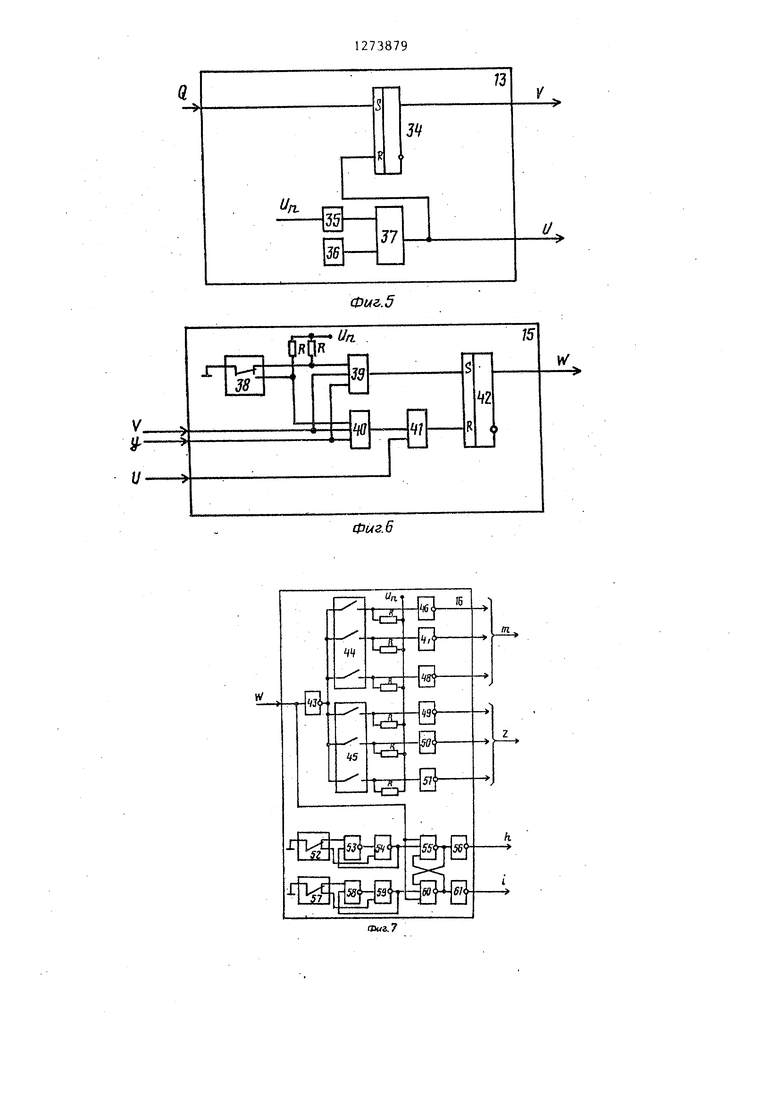
Изобретение относится к автоматике и вычислительной технике и предназначено для использования в системах программного управления агрегатами для производства намоточных изделий. Цель изобретения- расширение области применения и повышения быстродействия устройства. На фиг. 1 изображена функциональная схема устройства-; на фиг. 2 диаграмма его работы, на фиг. 3 функциональная схема блока управления формированием адреса; на фиг.4функциональная схема и диаграмма работы синхронизатора; на фиг. 5-8 функциональные схемы блока запуска, задатчика рел(имов, блока ввода уставок и блока вычитающих счетчиков на фиг, 9 - блок-схема алгоритма работы устройства. Устройство содержит коммутатор 1, компаратор 2, блок 3 памяти, блок 4 регистров, счетчик 5 адреса, блок 6 управления формированием адреса, бло 7 элементов ИЛИ, блок 8 памяти текущих адресов, генератор 9, синхронизатор 10,элемент И 11, счетчик 12 номеров каналов, блок 13 запуска, элемент И 14, задатчик 15 режимов, блок 16 ввода уставок, блок 17 элементов HJEi, блок 18 памяти величин уставок, элемент ИЛИ 19, элемент ЗАПРЕТ 20, блок 21 вычитающих счетчиков . Блок 6 управления формированием ад,реса образуют элемент И 22, элементы ИШ1 23 и 24, РАВНОЗНАЧНОСТЬ 25 ,и ЗАПРЕТ 26 и 27. Синхронизатор 10 содержит элементы И-НЕ 28 и И 29, счетчик 30, дешиф ратор 31, элемент ИЛИ 32, триггер 33 Блок 13 запуска включает в себя триггер 34, одновибратор 35, датчик 36 импульса начальной установки и элемент ИЛИ 37. Задатчик 15 режимов состоит из пе реключателя 38, элементов И 39 и 40 и ИЛИ 41, а также триггера 42. Блок 16 ввода уставок содержит усилитель 43, груцпы 44 и 45 переклю чателей, элементы НЕ 46-51, кнопку 52, элементы И-НЕ 53-55, элемент НЕ 56, кнопку 57, элементы И-НЕ 5860 и элемент НЕ 61, Блок 21 вычитающих счетчиков образуют элемент 62 задержки дёмульт плексор 63 и в каждом канале управл 792 ния вычитающий счетчик 64, блок 65 дешифраторов, блок 66 цифровых индикаторов (количество дешифраторов и индикаторов определяется количеством десятичных разрядов счетчиков), выходной триггер 67 и элемент ЗАПРЕТ 68. Устройство работает следующим образом. В блок 3 памяти, выполненный на базе интегральных программируемых постоянных запоминающих устройств,для каждой из групп механизмов намоточного оборудования записывается соответствующая программа работы. Программы состоят из определенного числа управляющих слов, которые имеют три зоны и бывают трех видов: -команды на включение и отключение механизмов; - команды условного перехода; -команды занесения величины уставки в блок вычитающих счетчиков. Вид команды определяется соответствующими признаками (П, 00, или 10), занесенными в третью зону памяти. При чтении последней признаки возникают на линиях связи L1 и L2, которые являются операционными выходами блока 3 памяти. Разряды первых информационных выходов (шина S) образуют выходы зоны 1 памяти, которая предназначена для хранения комбинандй состояний, в которые должны прийти механизмы по сигналам зоны II, если значения признака 11, и для хранения кодов условий возможных переходов, если значения признаков 00. Разряды вторых информационных выходов (шина R) образуют выходы зоны II памяти, которая предназначена для хранения комбинации сигналов управления механизмами на данном шаге, если значение признака 11, кодов адреса условного перехода, если значение признака 00, иликодов адреса уставки, если значение признака 10. Адресация и чтение содержимого всех трех зон выполняется параллельJJQ g соответствии с кодом, поступающим по шинеР с выходов счетчика 12 номеров каналов (старшие разряды кода адреса) и по щине Т с выхода счетчика 5 адреса (младшие разряды кода адреса). Старшие разряды .кода адреса определяют области памяти, в которых записаны программы работы каждой из групп механизмов намоточного оборудования, а младшие разряды - конкре ные ячейки соответствующих областей памяти, в которых записаны управля ющие слова этих программ. Младшие разряды кода начального адреса программ работы каждой из групп механизмов представляют собой нулевую кодовую комбинацию, т.е. на чальный адрес программы по каждому каналу - нулевой. При включении устройства обеспечивается автоматические занесение нулевых кодовых комбинаций в блок 8 памяти текущих адресов следующим об разом. При включении питания блок 13 за пуска по второму выходу выдает сигнал, закрывающий первый элемент И 14, а по первому выходу формирует кратковременный импульс .Начальная установка (линия связи U), который поступает на входы сброса син ронизатора 10, счетчика 12 номеров канала, задатчика 15 режимов и блок 21 вычитающих счетчиков, устанавлив их в исходное состояние, причем на шине Р появляется код первого канал а на линии связи W - нулевой сигнал разрешающий прохождение импульсов генератора 9 на вход синхронизатора Количество управляет гх групп механизмов намоточного оборудования определяется; числом каналов управления. Управление каналами разделено во времени сигналами (фиг.. 2),поступающими от счетчика 12 номеров ка налов, при этом синхронизатор 10 фор мирует импульсы, необходимые для выдачи и отработки одной команды соответствующей программы. Последний на своем первом выходе (линия связи А) вырабатывает импульс, который не проходит через закрытый элемент И 14 (сигнал Чтение блока 8 не образуется) , не обеспечивает с помощью блока 6 управления формированием адреса формирование сигнала записи в счетчик 5 адреса (линия связи N). Так как чтение информации из блока 8 памяти текущих адресов при этом не происходит, то на его выходе имеется нулевой код, который и записыва ется в счетчик 5 адреса. Отработка команды по нулевому адресу, выполняемая по второму - четвертому импульсам синхронизатора, ничем не отличается от отработки других команд программы. После отработки команды содержимое счетчика.5 адреса по ши879 4 не Т заносится в блок 8 памяти текущих адресов импульсом, вырабатываемом синхронизатором 10 на пятом выходе (линия связи Е). Аналогично происходит обращение в начале цикла к нулевым адресам по остальным каналам. После первого обращения к программам всех каналов счетчик 12 номеров каналов возвращается в исходное положение и на его выходе переноса (линия связи Q) вырабатывается импульс, поступающий в блок 13 запуска. Под действием этого импульса последний формирует на своем втором выхода (линия связи V) разрешающий сигнал, поступающий на первый управ- . .ляющий вход задатчика 15 режимов и второй вход первого элемента И 14, который после этого начинает пропускать импульсы синхронизатора 10 на второй управляющий вход блока 8 памяти текущих адресов. Благодаря -этому текущий адрес программы из.блока i 8 памяти текущих адресов считывается и переписывается в счетчик 5 адреса.. Программа работы устройства составляется таким образом, чтобы управляющее слово,записанное по нулевому адресу программы, содержало кодовую комбинацию состояний датчиков, необходимую для работы устройства в автоматическом резгиме и включающую наличие сигнала от датчика пуска, и кодовую комбинацию сигналов управления, включающую сигнал Изменение режима разрешено (линия связи у), который поступает на второй управляющий вход задатчика 15 режимов. В устройстве предусмотрено два режима работы: запись числовых уставок и автоматический режим, выбор которых осуществляется с помощью датчика 15 режимов. Соответствующий режим работы устанавливается переключателем 38 задатчика 15 , при этом изменение режима работы осуществляется только после занесения начальных нулевых адресов программ в блок 8 памяти текущих адресов (разрешающий сигнал на линии связи V) тогда, когда цикл работы станка еще не начался или уже закончен, о чем свидетельствует отработка управляющего слова по нулевому адресу (разрешающий сигнал на линии связи у), Для ввода или изменения програмы намотки катушек электротехнических зделий (количество катушечных групп. количество катушек в группе, число витков, в катушке, скорость разгона и замедления при намотке и т.д.) переключатель 38 устанавливают в нижнее положение Ввод уставок В этом случае на выходе задатчика 15 режимов (линия связи W) возникает единичный сигнал, который поступает на синхронизатор -10 и блок 16 ввода уставок, блокируя первый и разрешая работу второму, при этом синхронизатор 10останавливается в положении, когда на всех его выходах (A,B,C,D, EjF) отсутствуют сигналы управления Б блоке 16 ввода уставок, набирают ся на переключателях 44 и 45 величина и адрес числовой уставки, коды которых подаются непосредственно и через блок элементов ИЛИ 17 (шины m и Z соответственно) на информационные и адресные входы блока 18 памяти величин уставок. При подаче сигнала (нажатии, соответствующей кнопки в блоке 16 ввода уставок) на первый управляюпщй вхо.д (линия связи h) бл ка о памяти величин уставок в последний записывается величина уставк по заданному адресу. Контроль записанной информации осуществляется в результате нажатия в блоке 16 ввода уставок кнопки 57 и возникновения на его выходе (линия связи i) сигнала, который через элемент ИЛИ 19 поступает на второй управляющий вход блока 18 памяти величин уставок и управляющий вход блока 21 вычитающих счетчиков. Считанная информация заносится в соответствующий счетчик блока 21 вычитающих счетчиков, имеющий в своем составе индикаторы. Таким образом, последовательно у тавка за уставкой в блок 18 памяти величин уставок .заносятся намоточны данные катулек, подлежащих изготовл нию. С помощью переключателя 38 за датчика 15 устанавливается автомати ческий режим работы оборудования, при этом на выходе задатчика возник ет нулевой сигнал, разрешающий прохождение импульсов генератора 9 на вход синхронизатора 10. Цикл начина ется после поступления сигнала, от датчика пуска, подключенного к входу коммутатора 1. До прихода этого сигнала изменение текуй(его адреса программы, а следовательно, и выпол нение цикла не происходит. Отработа программы намоточного оборудования осуществляется путем поочередного для каждого цикла считывания управляющих слов из блока 3 памяти. При отработке команды, например, программы канала счетчик 12 номеров каналов выдает по шине Р на адресные входы коммутатора 1, блока 3 памяти, блока 4 регистров, блока 8 памяти текущих адресов и блока 21 вычитающих счетчиков код, соответствующий номеру первого канала. В результате этого к коммутатору 1 подключа- ются датчики дискретных сигналов состояний механизмов первого канала, на вторые адресные входы блока 3 мяти подается код, соответствующий зоне памяти, где записана программа работы механизмов первого канала, в блоке 8 памяти текущих адресов выбирается ячейка, где хранится текущий адрес программы управления первым каналом, в блоке регистров 4 и в блоке 21 вычитающих счетчиков подготавливаются к приему Информации соответственно регистр и вычитающий счетчик. соответствующие первому каналу. Импульсы генератора 9 поступают на первый вход синхронизатора 10 (линия связи З), который вырабатывает импульс на своем первом выходе (ли- . ния связи А)5 поступающий через первый элемент И 14 на второй управля- , ющий вход блока 8 памяти текущих адресов как сигнал Чтение блока 8 и через блок 6 управления формированием адреса на управляющий вход (линия связи W) счетчика 5 адреса как сигнал Запись в счетчик 5, при этом текущий адрес программы управления первым каналом считывается из блока 8 памяти текущих адресов на щину R и через блок 7 элементов ИЛИ записьтается в счетчик 5 адреса. Последний вместе со счетчиком 12 номеров каналов выбирает с помощью щин Т и Р ячейки памяти блока 3, соответствуюmjje текущему адресу программы первого канала. После окончания первого импульса синхронизатор 10 выдает команду Чтение блока 3, на своем втором выходе (линия связи В), которая поступает на управляющий вход блока 3 памяти, в результате чего происходит чтение управляющего слова, разряды которого появляются на операционных, первых и вторых информационных . выходах блока (линии связи L1, L25 шины S и R соответственно). Дальнейшая работа устройства зависит от вида прочитанного слова из блока 3 памяти и результата сравнения кодо.в компаратором 2. При чтении из блока 3 памяти слова первого вида на второй и третий входы элемента И 1 подаются разрешающие сигналы (на линиях связи L1 и L2 присутствуют признаки в виде сигналов логических единиц - II), Одновременно с командой на втором выходе синхрони затор 10 выдает импульс меньшей длительности на своем третьем выходе (линия связи с). Этот импульс через элемент И 11 поступает на управляющи вход блока 4 регистров (линия связи G) и осун1ествляет запись слова из второй зоны блока 3 памяти в регистр 1-го канала блока 4 регистров. По сигналам этого регистра включаются рабочие органы первой группы механиз мов станка и происходит изменение их состояний, которые фиксируются датчиком состояний механизмов первой группы. Сигналы от датчиков через коммутатор 1 поступают на один из входов компаратора 2 (шина Н), на другой вход которого поступает комби нация сигналов, записанная в первой зоне блока 3 памяти. При поступлении сигналов от датчиков, заданных программой (отработка заданного шага программы), компаратор 2 формирует сигнал 1, который поступает (линия связи к) на первый вход блока 6 управления формированием адреса, в прр тивном случае компаратор 2 формирует сигнал О. Импульс с четвертого выхода синхронизатора 10 по линии связи D поступает на четвертый вход блока 6 управления формированием адреса, на втором и пятом входе (линии связи L1, L2) которого в этом случае присутствует признак команды на включение и отключение механизмов. В зависимости от выходного сигнала компаратора число в счетчике 5 адреса увеличивается на единицу или остается без изменений. Если на выхо де компаратора 2 присутствует сигнал 1, блок 6 управления формированием адреса формирует импульс, поступающий по линии связи М на счетный вход счетчика 5 адреса, если на выходе компаратора 2 имеется сигнал О, этот импульс не формируется. При чтении слова второго вида реализуется команда условного перехода по комбинации условий, в качестве которых могут быть использованы сиг- налы не только от датчиков состояний механизмов, но и органов управления от других устройств. В зтом случае на операционных выходах (линии связи L1, L2) блока 3 памяти присутствует признак 00, элемент И 11 закрыт, блокируя прохождение импульса синхронизатора 10 (линия связи с) на управляющийвход блока 4 регистров. Компаратор 2 осуществляет сравнение сигналов от датчиков с комбинацией сигналов, поступающих с первого информационного выхода блока 3 памяти. При их совпадении компаратор 2 вьщает сигнал 1 , в результате чего импульс, формирующийся на четвертом выходе синхронизатора 10, поступает через блок 6 управления формированием адреса и линию связи N на управляющий вход счетчика 5 адреса; На.информационный вход счетчика 5 адреса поступает через блок 7 элементов ИЛИ код адреса перехода с вторых информационных выходов б.лока 3 памяти, Происходит переход к заданному шагу программы работы для данного канала. Если совпадения не произопшо, компаратор 2 выдает сигнал О. Через блок 6 управления формированием адреса на счетный вход счетчика 5 адреса проходит импульс, сформированный на четвертом выходе синхронизатора 10, что обеспечивает переход к следующему шагу программы. При чтении слова третьего вида выполняется команда занесения величины уставки в блок 21 вычитающих счетчиков. В этом случае на операционных выходах (линиях связи L1, L2) блока 3 памяти и блока 6 управления формированием адреса присутствуют признаки 10, блок 4 регистров закрыт для приема кода, а элемент ЗАПРЕТ 20 подготовлен к работе. Код адреса уставки с второго информационного выхода (шина R) блока 3 памяти через блок I7 элементов ИЛИ поступает на адресный вход блока 18 памяти величин уставок. Сформированный на третьем выходе синхронизатора 10 импульс проходит по линии связи С через элементы ЗАПРЕТ 20, ИЛИ 19 на второй управляющий вход блока 18 памяти величин уставок и управляюий вход блока 21 вычитающих счетчиков. Считанная из блока 18 величина ставки заносится в соответствующий вычитающий счетчик блока 21, адрес которого определяется счетчиком 12 номеров каналов. Импульс, возникающий на четвертом выходе (линии свя,зи D) синхронизатора 10, поступает через блок 6 управления формированием адреса на счетный вход счетчика 5 адреса, что обеспечивает переход к следующему шагу программы. По команде первого вида, следующей за данной включается механизм, обеспечивающий намотку соответствующей катушечной группы, а следовательно, от одного из датчиков счета витков сигналы поступают на первый информационный вход., блока 21 - второй вход устройства (шина Х2). После отработки заданной величины уставки возникает сигнал на соответствующем выходе бло ка 21 вычитающих счетчиков, который подключается к вторым информационным входам коммутатора 1 и воспринимается устройством так же, как сигналы от остальных датчиков. По следующей команде первого вида механизм, обеспечивающий намотку катушечной группы, отключается. Импульс, формирующийся на пятом выходе синхронизатора 10, независимо от вида слова поступает по линии связи Е на первый управляющий вход блока 8 памяти текущих адресов, на информационный вход которого по шине Т поступает содержимое счетчика 5 адреса, а на адресный вход - по шине Р код номера первого капала. Текущий адрес программы из счетчика 5 адрес переписывается в блок 8 памяти текущик адресов. Импульс с шестого выхо да синхронизатора 10 переводит счетчик 12 номеров каналов в состояние, соответствующее второму каналу, затем синхронизатор 10 возвращается в исходное состояние. Работа устройства при управлении вторым и последующими каналами при отработке, всех шагов программы аналогична описагшой. По отработке управляющего слова первого вида текущий адрес программы не меняется до тех пор, пока компаратор 2 не выдает результат сравнения, следователь но, не меняются и команды на включе ние и отключение механизмов. Если это время превыщает время,отведенное для данной технологической опер ции оборудования, что происходит в аварийной ситуации (поломка датчика или механизма), то устройство выдае 1 сигнал Неисправность, который поступает на сигнальный элемент намоочного оборудования. При этом устойство отключают, устраняют неисправность, а затем снова включают. На фиг, 2 показана диаграмма работы устройства при управлении четырьмя каналами, при этом условно показана различная последовательность сигналов в зависимости от вида управляющего слова и результата сравнения сигналов компаратором 2, В первом канале на первом шаге программы отрабатывается команда включения и отключения механизмов и осуществляется переход к следующей команде, на втором шаге осуществляется перезапись уставки из блока 18 памяти величин уставок в первый счетчи-к блока 21 и переход к следующей команде., Во втором канале на первом шаге программы выполняется команда условного перехода, условие не выполняется, осуществляется переход к следующей команде, на втором шаге - осуществляется перепись уставки из блока 18 во второй счетчик блока 21 и переход к следующей команде. В третьем канале также вьшолняется команда условного перехода, но условие выполняется, в счетчик 5 адреса заносится из блока 3 памяти за- . данный адрес, В четвертом канале осуществляется запись в четвертый регистр блока 4 команды включения и отключения механизмов, адрес в счетчике 5 не меняется и заносится в блок 8 памяти текущих адресов. Предлагаемое устройство может быть применено при управлении сложными намоточно-укладочно-заклиновочными агрегатами, обмоточно-изолированными комплексами, включаюпшми транспортные системы, когда возникает необходимость параллельного выполнения операций единого технологического процесса изготовления обмотанных статоров, а также для числового программного управления различными агрегатами циклического действия с постоянной и переменной последовательностью операций в циклах как в электротехнической, так и в других отраслях промьшленности, Формула изобретени 1 . Устройство для программного управления намоточным оборудованием по авт.ев, № 1160366, отлича ющееся тем, чТо, с целью расширения области применения и повышения быстродействия устройства, в него введены задатчик режимов, блок вы читающих счетчиков, блок ввода уставок, второй блок элементов ИЛИ, элемент ИЛИ, элемент ЗАПРЕТ и блок памяти величин уставок, первьш управля ющий И информационные входы которого подключены к первому управляющему и информационным выходам соответственно блока ввода уставок непосредствен но, а адресные входы - к вторым информационным ВЫХОД9.М блока ввода уставок через второй блок элементов ИЛИ, вторые входь которого соединены с вторыми информационными выходами блока памяти, вход сброса, первый и второй управляющие входы задатчика режимов соединены соответственно с первым и вторым выходами блока запуска и вторым выходом блока регист.ров, вход блока ввода уставок подключен к входу запрета синхронизатора и выходу задатчика режимов,первый прямой,, инверсный и второй прямой входы элемента ЗАПРЕТ подключены соответственно к первому и второму операционным выходам блока памяти и третьему выходу синхронизатора, выход элемента ЗАПРЕТ соединен с первым входом элемента ДЛИ, второй вход которого соединен с вторым управляющим . входом блока ввода уставок,выходы, вход сброса, адресные вторые инф9рмационные и управляющий входы блока вычитающих счетчиков подключены соответственно к вторым информа87912ционным входам коммутатора, первому выходу блока запуска, информационным выходам счетчика номеров каналов, выходам блока памяти величин уставок и выходу элемента ИЛИ, соединенному с вторым управляющим входом блока памяти величин уставок, первые информационные входы блока вычитающих счетчиков являются вторым входом устройства, а второй операционный выход блока памяти подключен к пятому входу блока управления формированием адреса и третьему входу второго элемента И, 2.-.Устройство по п. 1 , отличающее ся. тем, чта.блок управления формированием адреса содержит элементы И, РАВНОЗНАЧНОСТЬ, ИЛИ и ЗАПРЕТ, выходы первого и второго элементов ИЛИ соединены с первым и вторым -выходами блока соответственно. первый вход которого связан с первьи входом элемента РАВНОЗНАЧНОСТЬ и первым прямым входом первого элемента ЗАПРЕТ, второй вход - с первым инверсным входом первого элемента ЗАПРЕТ, первым прямым входом второго элемента ЗАПРЕТ и вторым входом элемента РАВНОЗНАЧНОСТЬ, третий вход с первым входом второгб элемента ИЛИ, четвертый вход - с вторыми прямыми входами первого и второго элементов ЗАПРЕТ и с первым входом элемента И, а пятый вход - с третьим входом . элемента РАВНОЗНАЧНОСТЬ и с инверсным входом второго и вторым инверсным входом первого элементов ЗАПРЕТ, подключенных выходами к первому входу первого и второму входу второго элементов ИЛИ соответственно, второй вход элемента И соединен с выходом элемента РАВНОЗНАЧНОСТЬ, а выход с вторым входом первого элемента ИЛИ.
.З
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для программного управления технологическим оборудованием | 1986 |
|
SU1372277A1 |
| Устройство для программного управления технологическим оборудованием | 1987 |
|
SU1423982A1 |
| Устройство для программного управления намоточным оборудованием | 1983 |
|
SU1160366A1 |
| Устройство контролируемого пункта | 1983 |
|
SU1211784A1 |
| Автоматизированная система тестового контроля | 1985 |
|
SU1278857A1 |
| Устройство для программного управления автоматическими линиями гальванопокрытий | 1983 |
|
SU1173393A1 |
| Автоматизированная система контроля радиоэлектронных устройств | 1989 |
|
SU1683038A1 |
| Устройство для управления процессом смешения жидких продуктов | 1985 |
|
SU1272314A1 |
| Устройство для воспроизведения видеосигнала | 1987 |
|
SU1555918A1 |
| Устройство программного управления автооператорами гальванической линии | 1980 |
|
SU943337A1 |
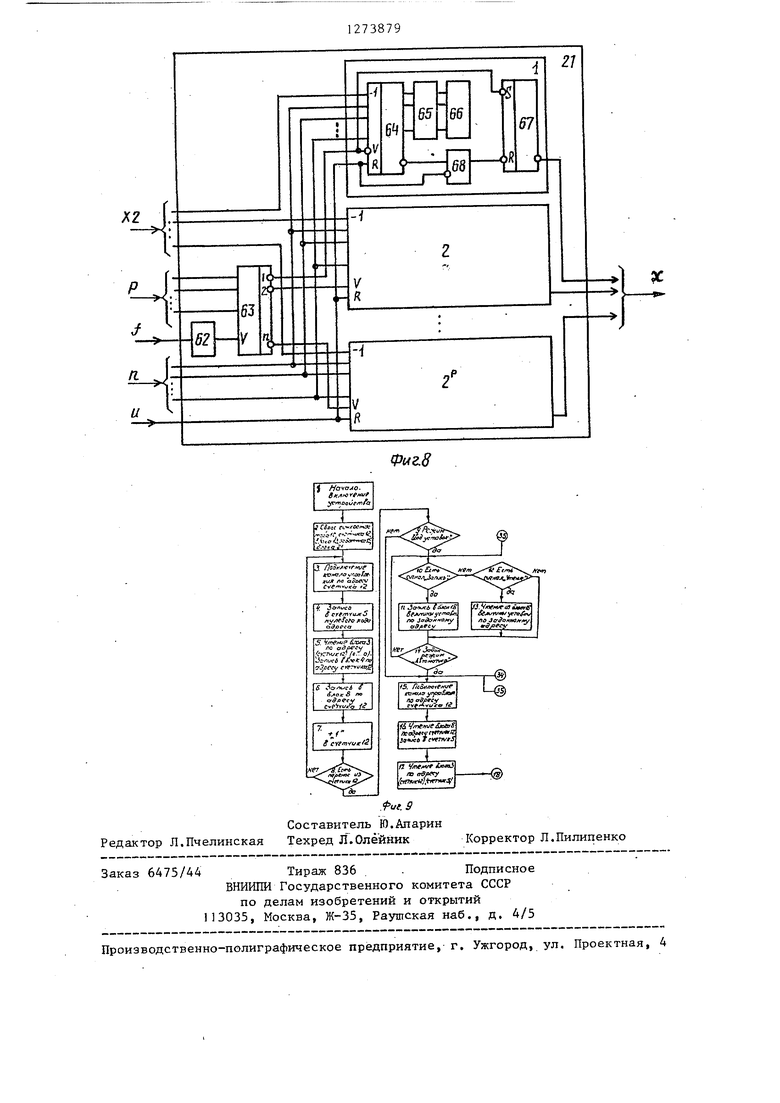
Изобретение относится к области автоматики и вычислительной техники и предназначено для использования в системах программного управления агрегатами для производства намоточных изделий. Решается задача повышения быстродействия устройства. В блок памяти заносится программа работы. При отработке программы счетчик номеров каналов выдает.на адресные входы коммутатора, блока памяти, блока регистров и блока памяти текущих адресов код первого канала. Импульсы генератора поступают на первый вход синхронизатора, при этом текущий адрес программы з равления первым сигналом считьюания из блока памяти текущих адресов и через блок элементов ИЛИ записывается в счетчик адреса. Затем синхронизатор выдает сигнал считьшания управляющего слова из блока памяти. Импульс синхронизатора через второй элемент И поступает на управляющий вход блока регистров и осуществляет в него запись из i блока памяти. По сигналам блока регистров включаются рабочие органы (Л механизмов станка. Сигналы от датчиков через коммутатор подаются на входы компаратора, на другие входы которого подаются сигналы из блока памяти. При совпадении указанных сиг- налов компаратор формирует сигнал логической единицы, который увеличивает содержимое счетчика адреса. tc 9 ил. СХ) 00 со
ФигЛ
.
и.
/г
3
;з
У
и,
15
flf
38
V,
я-- иШ
41
Фиг. 6
Фиг.8
| Устройство для программного управления намоточным оборудованием | 1983 |
|
SU1160366A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
